6.6.10. МИКРОПРОЦЕССОРЫ В ЭЛЕКТРОПРИВОДЕ
6.6.10. МИКРОПРОЦЕССОРЫ В ЭЛЕКТРОПРИВОДЕ
Создание в США на границе 60–70-х годов четырехразрядного однокристалльного микропроцессора INTEL 4004 и программируемого логического контроллера (ПЛК) PDP 14 ознаменовало новую эру в сфере управления электропривода. Уже в 70-е годы в мировой практике эти технические средства начали интенсивно вытеснять использовавшиеся ранее контактные и бесконтактные реле; к 80-м годам схему управления на восьми и более реле стало экономически целесообразно заменять ПЛК.
В сравнении с устройствами монтажной логики ПЛК обладает высокой гибкостью при отладке, он не зависит от объекта управления, снижает расходы на разработку, программирование, тестирование и запуск изделия, очень компактен, имеет высокую надежность, упрощает обслуживание системы привода. ПЛК может выполнять вычисления, обеспечивать регулирование, принятие решений, наблюдение за отработкой алгоритма управления.
В сравнении с мини-компьютером ПЛК существенно проще, он ориентирован на непосредственное общение с объектом управления. На рис. 6.51 показаны зоны рентабельного использования различных технических средств управления.
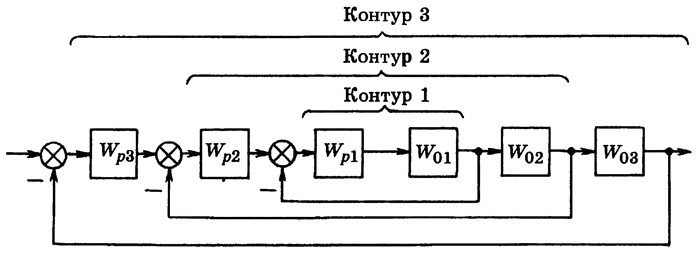
Рис. 6.50. Система подчиненного регулирования координат электропривода
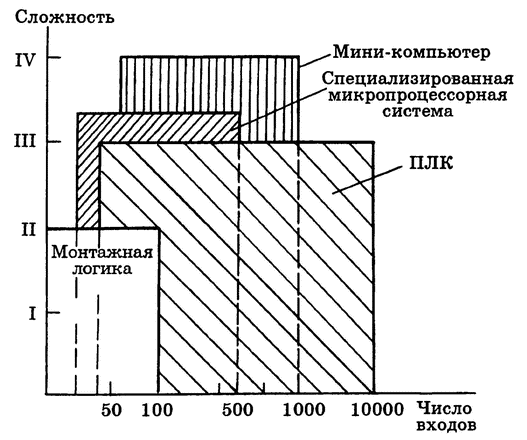
Рис. 6.51. Области рентабельного использования различных технических средств управления
По мере развития микропроцессорных средств управления и ПЛК изменялась информационная часть электропривода: резко, почти скачкообразно, наращивались функциональные возможности в управлении координатами, во взаимодействии нескольких систем между собой и с внешней средой, в детальной диагностике состояния и защите всех элементов привода от любых нежелательных воздействий.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
6.6.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ЭЛЕКТРОПРИВОДЕ
6.6.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ЭЛЕКТРОПРИВОДЕ Идеи автоматического управления, зародившиеся задолго до создания работоспособного электропривода (идеи Уатта — Ползунова и др.), в 30-е годы начали интенсивно развиваться применительно к электроприводу. Первые
6.6.7. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ В ЭЛЕКТРОПРИВОДЕ. СИСТЕМЫ ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ — ДВИГАТЕЛЬ (ТП — Д) И ИСТОЧНИК ТОКА — ДВИГАТЕЛЬ (ИТ — Д)
6.6.7. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ В ЭЛЕКТРОПРИВОДЕ. СИСТЕМЫ ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ — ДВИГАТЕЛЬ (ТП — Д) И ИСТОЧНИК ТОКА — ДВИГАТЕЛЬ (ИТ — Д) В послевоенные годы в ведущих лабораториях мира произошел прорыв в области силовой электроники, кардинально изменивший многие
11.4.7. МИКРОПРОЦЕССОРЫ И МИКРОКОНТРОЛЛЕРЫ
11.4.7. МИКРОПРОЦЕССОРЫ И МИКРОКОНТРОЛЛЕРЫ Создание цифровых средств управления на основе БИС стало возможным после появления микропроцессоров (МП). В 1971 г. американская фирма «Intel» выпустила первое устройство («Intel 4004»), предназначенное для выполнения вычислительных