Ощущение тела
Ощущение тела
Ощущение тела включает чувство его положения относительно опорных точек и в пространстве. Простейшее «чувство тела» можно смоделировать в роботе при помощи многочисленных датчиков наклона (см. рис. 5.28). По меньшей мере, робот сможет «понять», имеет ли он наклон вперед или назад, находится на «животе» или на «спине», вверх ногами или на правом боку. На основе полученной информации о положении тела робот может совершить некоторые действия и изменить свое положение.
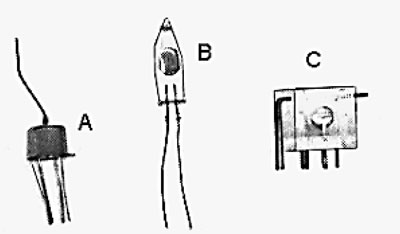
Рис. 5.28. Датчики наклона
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Электрические свойства тела человека
Электрические свойства тела человека Электропроводность — один из параметров, характеризующих жизненную деятельность живого существа. С возникновением живого организма любого вида начинаются биоэлектрические явления, которые прекращаются только после гибели живого
ЧАСТЬ III. Ощущение срочности
ЧАСТЬ III. Ощущение срочности Мы познакомили читателя с революцией эффективности, которая весьма выгодна ее пионерам и несколько менее — их последователям. В отличие от традиционной борьбы с загрязнением окружающей среды, повышение эффективности не требует каких-либо
§ 4.1 Ритц и проблема излучения абсолютно чёрного тела
§ 4.1 Ритц и проблема излучения абсолютно чёрного тела Принципиальные трудности в теории излучения чёрного тела ведут нас не столько к тому, чтобы вместе с Планком вводить частицу энергии-времени, но скорее к требованию восстановить при помощи принципа наименьшего
Глава 5 Криволинейное движение тела
Глава 5 Криволинейное движение тела Всем хорошо знакомы силы инерции, возникающие при ускорении или торможении движущегося тела. В терминах эфиродинамики, можно сказать, что «эфир проявляет себя» при ускорении тел. Впрочем, существование эфирной упругой среды можно
Глава 7 Компенсация веса тела
Глава 7 Компенсация веса тела Конструирование движителей нового типа требует уточнения понятия «открытой и закрытой физической системы», системы отсчета. Повод для размышлений дает тот факт, что вес тела, находящегося на поверхности планеты, зависит от места