Осязание и чувство давления
Осязание и чувство давления
Поразительная точность и верность чувства осязания у человека едва ли может быть достигнута в конструкции робота. Однако существует несколько типов простых датчиков, которые можно использовать для обнаружения прикосновения и давления. Датчики прикосновения обычно используются в роботах для обнаружения препятствий на пути следования, что позволяет роботу избегать столкновений.
Более совершенные датчики прикосновения и давления используются в конструкциях рук и кистей. Такие датчики позволяют «руке» робота захватывать и удерживать предметы с достаточным усилием без риска их повреждения. Простой датчик прикосновения и давления можно изготовить из электростатического (проводящего) поролона. Подобный поролон используется при упаковке ИС для защиты их от статического электричества. Такой поролон обладает определенной электрической проводимостью, которая изменяется при сжатии.
Необходимо использовать неплотный (мягкий) тип поролона, поскольку он имеет пористое строение и обладает достаточной гибкостью. При нажатии поролон сжимается, что приводит к изменению сопротивления между наложенными на него электродами.
На рис. 5.38 приведен чертеж простого датчика давления. Проводящие пластины (электроды) могут быть изготовлены из фольгированного материала для печатных плат, алюминиевой фольги или чего-то подобного. Более точные датчики касания и давления будут рассмотрены в этой главе ниже.
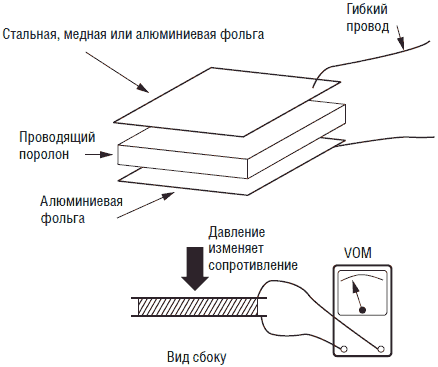
Рис. 5.38. Датчик давления на базе проводящего поролона
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Подпитывающие устройства и сигнализация давления масла кабельных маслонаполненных линий
Подпитывающие устройства и сигнализация давления масла кабельных маслонаполненных линий Вопрос. Где рекомендуется размещать подпитывающие баки низкого давления?Ответ. Рекомендуется размещать в закрытых помещениях. Небольшое количество подпитывающих баков (5–6) на
Установки электрической сварки с применением давления
Установки электрической сварки с применением давления Вопрос. Какой должна быть ширина проходов между машинами точечной, роликовой (линейной) и рельефной сварки при их расположении друг напротив друга?Ответ. Должна быть не менее 2 м, а между машинами стыковой сварки – не
Датчики давления
Датчики давления Для измерения сил хорошо подходят датчики давления, изображенные на рис. 5.44. «Чувствительный» элемент датчика расположен на специальной подложке размерами 14х14 мм на одном конце устройства. С увеличением приложенной силы сопротивление датчика падает.
6. Законы Паскаля. Приборы измерения давления
6. Законы Паскаля. Приборы измерения давления Что произойдет в других точках жидкости, если приложим некоторое усилие ?p? Если выбрать две точки, и приложить к одной из них усилие ?p1, то по основному уравнению гидростатики, во второй точке давление изменится на ?p2. откуда
9. Определение силы давления покоящейся жидкости на плоские поверхности. Центр давления
9. Определение силы давления покоящейся жидкости на плоские поверхности. Центр давления Для того, чтобы определить силу давления, будем рассматривать жидкость, которая находится в покое относительно Земли. Если выбрать в жидкости произвольную горизонтальную площадь ?,
10. Определение силы давления в расчетах гидротехнических сооружений
10. Определение силы давления в расчетах гидротехнических сооружений При расчетах в гидротехнике интерес представляет сила избыточного давления Р, при:р0 = ратм,где р0 – давление, приложенное к центру тяжести.Говоря о силе, будем иметь в виду силу, приложенную в центре
29. Парциальные давления
29. Парциальные давления Давление, записанное в виде: Pi=NikT/ V,где i= 1,2,..., r, называется парциальным. Здесь r– число газов в смеси;Ni– число молекул i-го газа;V– объем смеси;k– постоянная Больцмана;Т – температура.Оно может быть найдено, если все основные параметры газа
Указатель давления масла
Указатель давления масла На большинстве автомобилей этого указателя нет, установлена только аварийная лампочка, которая загорается, когда давление опускается ниже 0,3 кг/см3. Кстати, сам датчик давления масла, включающий аварийную лампочку на щитке приборов, – довольно
7. Осязание роботов
7. Осязание роботов Создание по – настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами – от нервных центров в мозт передаётся вся нужная информация. Системой
Подпитывающие устройства и сигнализация давления масла кабельных маслонаполненных линий
Подпитывающие устройства и сигнализация давления масла кабельных маслонаполненных линий Вопрос 103. В каких местах рекомендуется размещать подпитывающие баки низкого давления?Ответ. Рекомендуется размещать в закрытых помещениях. Небольшое количество подпитывающих
49. Приборы для измерения давления
49. Приборы для измерения давления Давление – это напряженность жидкостей и газов, а также паров, которую формирует некоторое внешнее воздействие на них.Как измерять эту напряженность?С этой целью измеряют данные, приходящие на единичную площадь той поверхности, на
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉