Проект 2: Схема интерфейса
Проект 2: Схема интерфейса
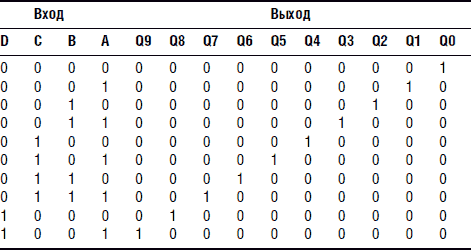
Основой схемы интерфейса является дешифратор 4028. ИС 4028 считывает двоично-десятичный код логики низкого уровня с выхода ИС 74LS373, расположенной на плате УРР, и выдает соответствующие сигналы высокого уровня (см. таблицу соответствий 7.2).
Принципиальная схема интерфейса изображена на рис. 7.6. Входы A,B,C, и D ИС 4028 подключены к нижнему полубайту двоично-десятичного кода ИС 74LS373. Когда я разобрал радиоуправляемую модель автомобиля, то обнаружил несколько проводов, которые при подаче питающего напряжения обеспечивают основные функции движения. Робот-автомобиль имеет четыре режима движения: движение вперед, поворот направо, поворот налево и задний ход.
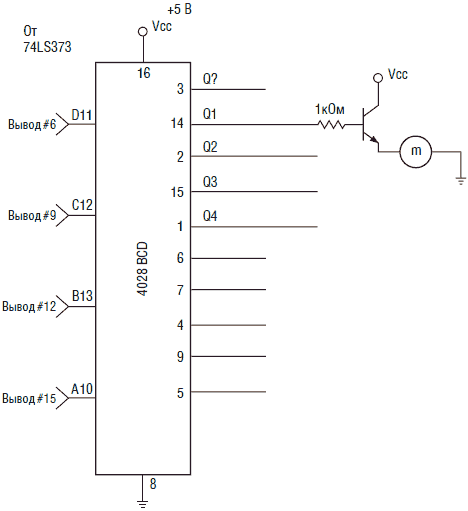
Рис. 7.6. Схема интерфейса переделанной модели автомобиля
Таблица 7.2. Таблица истинности ИС 4028
Каждый режим движения обеспечивается соответствующим включением двигателя или комбинации двигатель-соленоид. Управление включением может осуществляться с помощью NPN транзистора. К выходам ИС 4028, обозначенным Q1-Q4, подключены четыре транзистора, которые осуществляют необходимое управление.
Для наглядности иллюстрации на рис. 7.6 показан только один NPN транзистор, соединенный с выходом Q1 и управляющий работой двигателя. Модель радиоуправляемого автомобиля, которую я использовал, уже снята с производства. Тем не менее подойдет любая недорогая модель подобного радиоуправляемого автомобиля, поскольку они работают аналогично. Снимите схему радиоуправления с автомобиля. Останется провод управления работой двигателя, который для запуска двигателя должен быть соединен с источником питания или с землей. Повороты автомобиля обычно осуществляются недорогими соленоидами. Проверьте провода поворотных соленоидов для определения типа управления (подача напряжения питания или заземление).
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
1.1. Определение интерфейса
1.1. Определение интерфейса Позвоните по вышеуказанному номеру и испытайте невероятное разочарование от нашей системы голосовой почты. Надпись под рекламным объявлением одной из марок обуви В этой книге выражения интерфейс «человек-машина» или интерфейс
1.6. Определение человекоориентированного интерфейса
1.6. Определение человекоориентированного интерфейса Можно создать самолет с любыми техническими характеристиками, которые только пожелает Министерство военно-воздушных сил, если при этом не требуется, чтобы он мог летать. Вилли Мессершмидт (выдающийся немецкий
4.1. Количественный анализ интерфейса
4.1. Количественный анализ интерфейса Он все тыкал и тыкал пальцами в компьютер, а Мелроуз просто изумлялся тому, что машина, которая предназначена для избавления человека от всей мелкой, рутинной работы, выполняла такую простую задачу настолько долго, что Буб, наверное,
4.3.1. Производительность интерфейса для Хола
4.3.1. Производительность интерфейса для Хола Аккуратный подсчет есть путь к знаниям всех существующих вещей и тайных секретов. Папирусы Рхинда, 1650 г. до н. э. Аккуратный подсчет есть путь к знаниям всех существующих вещей и тайных секретов.Полезно подробно рассмотреть
Проект 1: Программируемая схема распознавания речи
Проект 1: Программируемая схема распознавания речи Первым проектом является создание программируемой схемы распозна-, -т вания речи. Термин «программируемый» используется в том смысле, что вы T"7V можете запрограммировать устройство для распознавания 40 отдельных слов по
Проект 3: общая схема интерфейса УРР
Проект 3: общая схема интерфейса УРР Интерфейс УРР для робота-передвижки является специализированной схемой, предназначенной для конкретной цели. Следующая схема интерфейса (см. рис. 7.8) представляет собой более универсальное устройство, дающее возможность управлять
Усовершенствование выхода интерфейса
Усовершенствование выхода интерфейса Выходы высокого логического уровня ИС 4028 можно использовать для управления нагрузками переменного и постоянного тока. Однако лучшим вариантом является подключение выходов 4028 к триггерам. Дело в том, что в конкретный момент на
Список деталей интерфейса
Список деталей интерфейса • (2) ИС 4011 2 элемента ИЛИ-НЕ• (1) ИС 74LS373 8 D триггеров• (1) ИС 4028 двоично-десятичный дешифратор• (1) ИС таймер 555• (1) ОУ LM741• (1) резистор 5,6 кОм• (1) резистор 15 кОм• (1) резистор 330 Ом• (2) резистор 10 кОм• (10) резистор 470 Ом• (1) конденсатор 47 мкФ• (1)
Электрическая схема
Электрическая схема Электрическая схема представляет собой электронный ключ, управляемый интенсивностью светового потока. Когда уровень средней окружающей освещенности мал (возможна подстройка порогового значения), то схема отключает питание двигателя редуктора.
Конструкция интерфейса для PC
Конструкция интерфейса для PC Схема PC интерфейса приведена на рис. 15.5. В набор деталей PC интерфейса входит печатная плата, расположение деталей на которой показано на рис. 15.6. Рис. 15.5. Принципиальная схема интерфейса РС Рис. 15.6. Схема расположения деталей РС
Программирование интерфейса УРР
Программирование интерфейса УРР Программирование интерфейса УРР аналогично процедуре программирования УРР из набора, описанного в гл. 7. Для правильной работы руки-манипулятора вы должны запрограммировать командные слова соответственно номерам, соответствующим
«Фрегат Экоджет»: новая схема самолета и новая бизнес-схема
«Фрегат Экоджет»: новая схема самолета и новая бизнес-схема Авиасалон МАКС традиционно выступает смотровой площадкой новых идей в самолетостроении. ФПГ «Росавиаконсорциум» по собственной инициативе разрабатывает программу создания широкофюзеляжного
2.3. Структурная схема
2.3. Структурная схема Структурная схема импульсного блока питания персонального компьютера конструктива ATX приведена на рис. 2.1. Рис. 2.1. Структурная схема импульсного блока питания фирмы DTK конструктива ATXВходное переменное напряжение 220 В, 50 Гц поступает на входной
2.4. Принципиальная схема
2.4. Принципиальная схема Полная принципиальная схема бестрансформаторного источника питания с максимальной вторичной мощностью 200 Вт фирмы DTK представлена на рис. 2.2. Рис. 2.2. Принципиальная схема бестрансформаторного источника питания на 200 Вт фирмы DTKВсе элементы на
3.3. Структурная схема
3.3. Структурная схема Структурная схема импульсного блока питания для компьютеров типа AT/XT, содержащая типовой набор функциональных узлов, представлена на рис. 3.1. Модификации блоков питания могут иметь различия только в схемотехнической реализации узлов с сохранением
3.4. Принципиальная схема
3.4. Принципиальная схема Импульсные источники питания данного класса имеют несколько различных модификаций схемотехнической реализации отдельных вспомогательных узлов. Принципиальных различий в их рабочих характеристиках нет, а разнообразие объясняется множеством