Немного о радиоуправляемых автомобилях
Немного о радиоуправляемых автомобилях
Радиоуправляемые модели превратились в популярное хобби. Существуют радиоуправляемые модели самолетов, вертолетов, планеров, катеров, подводных лодок, автомобилей, мотоциклов и т. д. Каркасы и системы пружинной подвески большинства моделей подходят для создания на их базе роботов «Големов».
Еще недавно большинство моделей работало на жидком топливе. В конце 70-х годов развитие технологии производства электрических батарей и двигателей сделало модели, работающие на электрической энергии, более популярными.
В моделях радиоуправляемых автомобилей обычно используются двухканальные системы управления «приемник/передатчик». По одному каналу осуществляется управление поворотами, а по другому – «педалью» акселератора. Каждый сигнал передатчика управляется переменным резистором на панели передатчика. Потенциометр, управляющий поворотом модели, часто соединяют с небольшим рулевым колесом на корпусе передатчика. Потенциометр акселератора часто соединяют с рукояткой или джойстиком.
Микросхема кодера передатчика модулирует несущую с помощью импульсов переменной ширины. Ширина импульсов зависит от положения (сопротивления) движка переменного резистора. Ширина модулирующих импульсов изменяется от 1 до 2 мс (см. рис. 9.3). В среднем положении движка ширина импульсов составляет 1,5 мс. В одном крайнем положении ширина импульсов достигает 2 мс. В другом крайнем положении импульсы сокращаются до 1 мс.
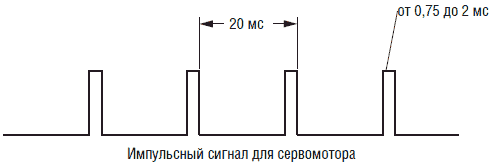
Рис. 9.3. Последовательность импульсов ШИМ для управления работой сервомотора
Декодер приемника обрабатывает импульсы и посылает соответствующие команды на управляющие сервомоторы. Сервомотор представляет собой интегральную конструкцию, состоящую из двигателя, редуктора, выходного вала и печатной платы управления. Управляющая схема печатной платы внутри сервомотора генерирует соответствующие импульсы на основании сопротивления внутреннего потенциометра, соединенного с выходным валом сервомотора. Управляющая ИС сравнивает импульсы внутренней схемы сервомотора и импульсы, приходящие с декодера приемника. Поворотом оси вала сервомотора длительность этих импульсов уравнивается. Таким образом, сервомотор изменяет и отслеживает положение вала ротора в соответствии с сигналом передатчика.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Немного о родословной
Немного о родословной Историки фирмы «МАН» утверждают, что корни компании уходят еще в начало XIX века, когда во время военных походов Наполеона был предложен проект строительства железной дороги в Баварии. Откликнувшись на эту идею, состоятельный торговец Иоган Фридрих
4.5.1. Немного истории
4.5.1. Немного истории Изобретателем трансформатора был русский ученый П. Н. Яблочков. В 1876 г. Яблочков использовал индукционную катушку с двумя обмотками в качестве трансформатора для питания электрических свечей (ламп накаливания). Трансформатор Яблочкова имел
XXI. НЕМНОГО ОБ ЭЛЕКТРОНИКЕ
XXI. НЕМНОГО ОБ ЭЛЕКТРОНИКЕ Эта глава предназначена для тех читателей, которые имеют представление об электронике, а также желание несколько подробнее ознакомиться с решением некоторых вопросов, возникших при прокладке трансатлантического телефонного кабеля. В то же
Система диагностики, применяемая в автомобилях фирмы «Isuzu»
Система диагностики, применяемая в автомобилях фирмы «Isuzu» Система диагностики автомобилей фирмы «Isuzu», очень похожа на систему «Toyota». В зависимости от модели автомобиля надо добраться до блока EFI и найти два провода, свободно висящие от этого блока, разъемы которых
Система диагностики, применяемая в автомобилях фирмы «Mitsubishi»
Система диагностики, применяемая в автомобилях фирмы «Mitsubishi» Прочесть коды неисправностей автомобилей фирмы «Mitsubishi» можно с помощью специального диагностического оборудования или используя вольтметр. В салоне автомобиля под панелью рядом с предохранителями есть
Система диагностики, применяемая в автомобилях фирмы «Subaru»
Система диагностики, применяемая в автомобилях фирмы «Subaru» Для диагностики автомобилей «Subaru» используются три типа кодов. Тип 08а – для диагностики двигателя, автоматической коробки передач и системы управления подушками безопасности. Тип 08b используется для
Система диагностики, применяемая в автомобилях фирмы «Mazda»
Система диагностики, применяемая в автомобилях фирмы «Mazda» Для самодиагностики двигателей фирмы «Mazda» надо в диагностическом разъеме проволочной перемычкой перемкнуть выводы TEN и GND (корпус). Этот разъем обычно находится в моторном отсеке возле аккумулятора или возле
XXI. НЕМНОГО ОБ ЭЛЕКТРОНИКЕ
XXI. НЕМНОГО ОБ ЭЛЕКТРОНИКЕ Эта глава предназначена для тех читателей, которые имеют представление об электронике, а также желание несколько подробнее ознакомиться с решением некоторых вопросов, возникших при прокладке трансатлантического телефонного кабеля. В то же