Плавание с помощью хвоста
Плавание с помощью хвоста
Как уже утверждалось ранее, устройства, имитирующие движения рыб, имеют очень низкий КПД. Эта модель не является исключением. Однако тщательный сбор информации источников типа МТИ может способствовать созданию модели (здесь этого не сделано) с гораздо большим КПД. И если кто-то хочет изготовлять роботов-андроидов, имеющих форму животного, то можно начать именно с этого проекта.
Кольцевые соленоиды
Движение робота-рыбы обеспечивается с помощью кольцевого соленоида (см. рис. 13.4). При включении питания верхняя часть соленоида поворачивается на угол примерно 30°. При отключении питания пружина возвращает механизм в исходное положение.

Рис. 13.4. Открытый отсек для размещения электронных компонентов
В верхней части соленоида находятся, по крайней мере, два резьбовых отверстия 1,6 мм, которые могут быть использованы для крепления деталей. В нижней части соленоида имеются две стойки с резьбой 1,6 мм для крепления соленоида. Соленоид оказался не таким мощным, как мне бы хотелось, но его все же достаточно для обеспечения подводного продвижения.
Электрическая схема
Для генерации медленной последовательности импульсов в схеме использован однопереходный транзистор Q1 (UJT2646) (см. рис. 13.5). Частота импульсов определяется номиналами C1 и R1. Импульсы подаются через резистор R2 на базу Q2. Q2 представляет собой NPN транзистор типа 2N2222. Транзистор Q2 используется для подачи инвертированного импульса на вывод 2 ИС 1. ИС 1 представляет собой таймер 555, включенный по схеме одновибратора. Форма и длина импульса определяются ИС 1. Выход таймера 555 управляет включением транзистора Q3. Транзистор Q3 управляет током, протекающим через кольцевой соленоид, использованный в роботе.
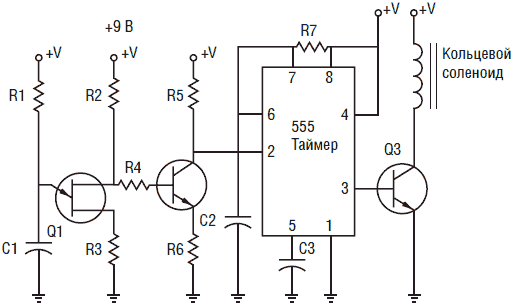
Рис. 13.5. Принципиальная схема устройства
Питание схемы осуществляется с помощью батареи 9 В. Схема достаточно проста и монтируется на печатной плате.
Проверьте работу схемы, соединив ее с соленоидом перед дальнейшей сборкой. Постоянная времени работы соленоида должна быть в районе 1 с.
Механика
Для снижения общей массы и веса устройства большинство деталей выполнено из алюминия. Первый вариант механизма, передающего движение соленоида к машущему хвосту «рыбы», изображен на рис. 13.6. Оказалось, что такой механизм сложнее, чем требуется. Окончательный вариант привода хвоста показан на рис. 13.7.
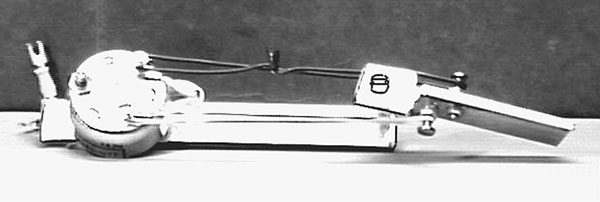
Рис. 13.6. Первоначальный привод движения хвоста
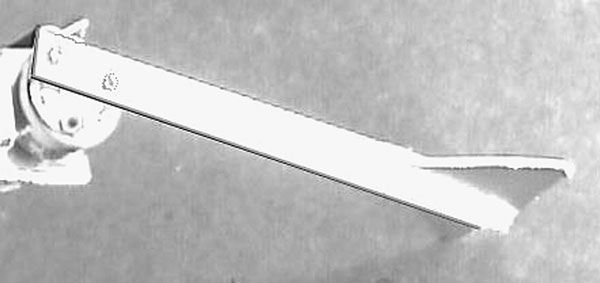
Рис. 13.7. Окончательный вариант привода
Полоса алюминия размерами 3х 12х 140 мм прикреплена к верхней крышке соленоида при помощи двух винтов 1,6 мм и длиной 6 мм. Просверлите сперва два отверстия в алюминиевой полосе, совпадающие с положением отверстий в верхней части соленоида. Затем, чтобы предотвратить излишне глубокое вворачивание винтов в соленоид, предварительно наверните на каждый винт гайку до упора. Если винты слишком глубоко ввернуты в верхнюю подвижную часть соленоида, то они будут препятствовать ее легкому вращению. Прикрепите алюминиевую полосу к подвижной части соленоида.
Плавник хвоста сделан из квадратного кусочка алюминия 30 мм, разрезанного по диагонали. Плавники крепятся к основанию 12 мм с помощью достаточного количества термоклея. Для лучшего контакта можно предварительно зачистить поверхности с помощью наждачной бумаги.
Соленоид крепится к задней части алюминиевой пластины размерами 3x30x50 мм на двух задних стойках 1,6 мм с помощью нескольких гаек. К передней части крепится плата электрической схемы и батарея (см. рис. 13.8).
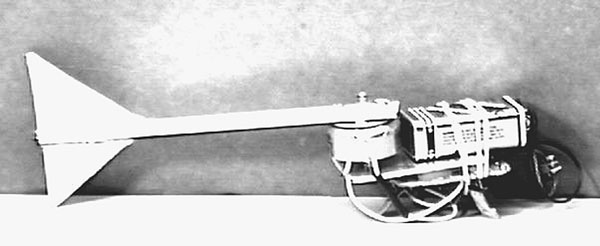
Рис. 13.8. Робот-рыба в сборе
Гидроизоляция
Мы изготовили привод соленоида и электрическую схему. Для исключения попадания воды, которая может привести к порче устройства, необходимо завернуть плату соленоида в тонкую прозрачную пленку, используемую в кулинарии. Чехол из пленки крепится к хвосту с помощью проволоки. Крепление должно обеспечивать легкое поперечное перемещение хвоста.
Перед тем как опускать устройство в воду, ему необходимо обеспечить нулевую плавучесть. Если вы опустите его в воду «как есть», то передняя тяжелая часть робота «спикирует» на дно, а взмахи хвоста будут осуществляться «в воздухе». При помощи резиновой ленты прикрепите полоски пенопласта к передней части модели поверх прозрачного чехла. Положите модель в воду для проверки. Добейтесь горизонтального или почти горизонтального положения равновесия. После этого можно включить модель и отпустить ее в «плавание».
Эффективность модели
Данная модель робота не обладает КПД настоящей живой рыбы, хотя и обеспечивает движение. Я думаю, что КПД устройства можно повысить, распилив алюминиевую хвостовую пластину 12х 140 мм пополам, и затем соединить половины с помощью пружины 50 мм. Такая пружина позволит хвосту поворачиваться и изгибаться, что может обеспечить больший КПД передвижения.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
МОДЕЛИРОВАНИЕ С ПОМОЩЬЮ «МАЛЕНЬКИХ ЧЕЛОВЕЧКОВ»
МОДЕЛИРОВАНИЕ С ПОМОЩЬЮ «МАЛЕНЬКИХ ЧЕЛОВЕЧКОВ» С каждой новой модификацией детерминированность шагов АРИЗ возрастает. Усиливается и информационное обеспечение. Тем не менее АРИЗ не отменяет необходимости думать, он лишь управляет процессом мышления, предохраняя от
Соединение деревянных деталей с помощью клея
Соединение деревянных деталей с помощью клея Без клея практически невозможно обойтись при соединении деталей. При склеивании древесины используют клей, который должен быть прозрачным, светлым, не изменять цвет древесины, не слишком быстро схватываться, чтобы можно было
1.9.3. «Яркие» и вкусные сосиски с помощью электричества
1.9.3. «Яркие» и вкусные сосиски с помощью электричества Много бывает фокусов, но я бы хотел акцентировать внимание читателя не столько на фокусах всем, пожалуй, известных, как-то кипячение в течении 1–2 минут воды в 3-х литровой банке с помощью опасной бритвы, к обоим концам
Соединение деревянных деталей с помощью клея
Соединение деревянных деталей с помощью клея Без клея практически невозможно обойтись при соединении деталей. При склеивании древесины используют клей, который должен быть прозрачным, светлым, не изменять цвет древесины, не слишком быстро схватываться, чтобы можно было
Гравирование с помощью абразивного инструмента
Гравирование с помощью абразивного инструмента Среди различного рода гравирования отдельно стоит гравирование абразивным инструментом. Этот способ представляет собой обработку изделия из стекла указанным инструментом, благодаря которому на изделии получается
Гибка органического стекла с помощью паяльника
Гибка органического стекла с помощью паяльника Таким способом выгибают небольшие детали из оргстекла. Для этого используют разогретое прямое жало электропаяльника. Сначала следует приложить жало к подготовленной полосе оргстекла в месте нужного изгиба. Затем материал
Дальнее плавание 15. "Петр Великий" покидает Кронштадт
Дальнее плавание 15. "Петр Великий" покидает Кронштадт Назначенный на первые дни мая 1881 года уход не состоялся. Сказались последствия суровой зимы. Лед в гавани и заливе сошел только 10 мая. 14 мая "Петр Великий" вышел на Большой Кронштадтский рейд для определения девиации.С
1.8. Принудительное подавление Wi-Fi c помощью специальных генераторов
1.8. Принудительное подавление Wi-Fi c помощью специальных генераторов Внимание, важно!Существует несколько способов блокировки Wi-Fi-сетей, и чем слабее роутер (мощность его сигнала), тем легче блокировать. В быту для этой цели достаточно применить простейшие «глушилки» из
ПЛАВАНИЕ ПОДВОДНЫХ ЛОДОК В АРКТИЧЕСКИХ ЛЬДАХ
ПЛАВАНИЕ ПОДВОДНЫХ ЛОДОК В АРКТИЧЕСКИХ ЛЬДАХ Центральный арктический бассейн (ЦАБ) занимает срединную часть Северного Ледовитого океана к северу от границы континентального шельфа окраинных арктических морей, проходящей примерно по 200-метровой изобате. Площадь ЦАБ
20. "Синоп" и "Георгий Победоносец" продолжают плавание
20. "Синоп" и "Георгий Победоносец" продолжают плавание До 31 января 1906 г. в составе Практической эскадры находились "Пантелеймон", "Ростислав", "Три Святителя", "Двенадцать Апостолов", "Синоп" и "Екатерина И". "Чесма" и "Георгий Победоносец" в плаваниях не участвовали – один стоял
Плавание с помощью крыла
Плавание с помощью крыла Хвост рыбы можно рассматривать как подводное крыло. При движении хвоста из стороны в сторону он отбрасывает поток воды назад и соответственно движет рыбу вперед. Во время движения хвоста в воде за ним образуются вихри. Есть основания полагать,
13. Дальнее плавание
13. Дальнее плавание В июне 1896 г. Кронштадтская гавань напоминала оживленный муравейник. Из Петербурга пришло указание готовить два броненосца и несколько миноносцев к дальнему плаванию. Кораблям следовало идти в Средиземное море, где с января 1892 г. находился "временный"
§ 3.17 Проверка БТР с помощью ядерной физики
§ 3.17 Проверка БТР с помощью ядерной физики Теория Ритца затронула бы всю известную нам картину ядерных сил и, следовательно, ядерных энергий… С позиций логики, прежде чем использовать эксперимент в качестве опровержения теории Ритца, следует ещё доказать, что он
5.3. Прослушивание помещений с помощью технических средств
5.3. Прослушивание помещений с помощью технических средств Регистрация разговоров (переговоров) является одним из самых распространенных способов и достаточно информативным каналом негласного получения информации. Прослушивание может осуществляться путем как