Подключение интерфейса к руке-манипулятору
Подключение интерфейса к руке-манипулятору
Питание роботизованной руки-манипулятора осуществляется от источника питания 6 В, состоящего из четырех D-элементов, расположенных в основании конструкции. Интерфейс PC питается также от этого источника 6 В. Источник питания является биполярным и выдает напряжения ±3 В. Питание на интерфейс подается через восьмиконтактный разъем Molex, присоединенный к основанию манипулятора.
Присоедините интерфейс к руке-манипулятору при помощи восьмижильного кабеля Molex длиной 75 мм. Кабель Molex присоединяется к разъему, расположенному в основании манипулятора (см. рис. 15.8). Проверьте правильность и надежность вставки разъема. Для соединения платы интерфейса с компьютером используется кабель типа DB25 длиной 180 см, имеющийся в наборе. Один конец кабеля присоединяется к порту принтера. Другой конец соединяется с разъемом DB25 на плате интерфейса.
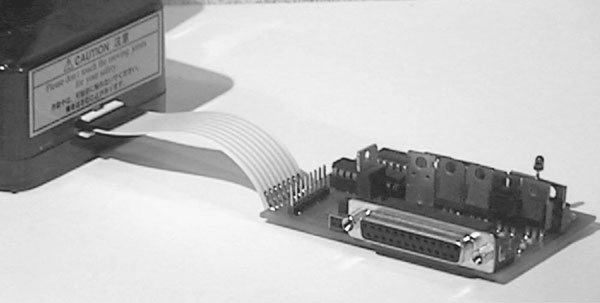
Рис. 15.8. Соединение РС интерфейса с рукой-роботом
В большинстве случаев к порту принтера штатно подключен принтер. Чтобы не заниматься присоединением и отключением разъемов каждый раз, когда вы хотите использовать манипулятор, полезно приобрести двухпозиционный блок переключателя шин принтеров A/B (DB25). Присоедините разъем интерфейса манипулятора к входу А, а принтер – к входу В. Теперь вы можете использовать переключатель для соединения компьютера либо с принтером, либо с интерфейсом.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
2.2.3. Оформление разрешения на подключение электроустановки
2.2.3. Оформление разрешения на подключение электроустановки Разрешение на подключение электроустановки выдает территориальное управление Ростехнадзора только при наличии договора энергоснабжения между потребителем и энергоснабжающей организацией.Разрешение
1.1. Определение интерфейса
1.1. Определение интерфейса Позвоните по вышеуказанному номеру и испытайте невероятное разочарование от нашей системы голосовой почты. Надпись под рекламным объявлением одной из марок обуви В этой книге выражения интерфейс «человек-машина» или интерфейс
Глава 7 Подключение электричества
Глава 7 Подключение электричества Вот уже много лет электричество является неотъемлемой частью нашей жизни, а ведь чуть больше ста лет назад люди и помыслить не могли о такой роскоши и обходились примитивными свечами и горелками.Для того чтобы не прослыть пещерным
2.5.5. Подключение и применение
2.5.5. Подключение и применение Вход усилителя (рис. 2.9) подключают к среднему выводу переменного резистора RP1 (обозначение на плате NS-881), регулятора громкости.Как уже отмечалось выше, его применение в NS-881 значительно увеличило срок службы батареи.Альтернативой описанного
Подключение приборов системы отопления
Подключение приборов системы отопления Монтаж системы водяного отопления предполагает соединение отдельных участков трубопроводов и подключение излучающих элементов, или радиаторов.Традиционным излучающим элементом в системах водяного отопления служит привычная
Подключение стиральной машины
Подключение стиральной машины Программное управление и использование микропроцессоров в устройстве современных стиральных машин сводит к минимуму участие человека в процессе стирки. Все, что от нас требуется, – установить оптимальный режим работы и загрузить в
1.6. Подключение устройств
1.6. Подключение устройств Когда пользователь подключает новое устройство к компьютеру, система сама находит нужный драйвер и устанавливает его. Однако, раньше с этим могли возникнуть проблемы, потому как интернет был не у всех, а даже если, у кого и был, то найти нужный
1.1.6. Подключение видеоглазков и бескорпусных видеокамер
1.1.6. Подключение видеоглазков и бескорпусных видеокамер Если серьезно подойти к вопросу о том, можно ли подключить видеокамеру или видеоглазок к обычному телевизору, какова максимальная длина провода от телевизора до видеокамеры, то надо рассматривать его
1.5. Подключение к видеорегистратору JSR-L402 mini
1.5. Подключение к видеорегистратору JSR-L402 mini Видеорегистратор JSR-L402 mini имеет 4 видеовхода, 4 аудиовхода, 1 аудиовыход, отображает 25 к/с на канал c разрешением D1, имеет режим разрешения записи: 100 к/с 4 кан. CIF(352?288), 100 к/с 4 кан. HD1 (704?288), 100 к/сек 4 кан D1(704?576) Life VIDEO, VGA выход, 2?BNC
1.5.11. Подключение к аудиовходу по НЧ
1.5.11. Подключение к аудиовходу по НЧ При подключении видеорагистраторов по низкой частоте (НЧ) на аудиоканалах применяется интерфейс типа RCA. Сопротивление аудиовхода высокое, поэтому необходимо применить активный звукосниматель(микрофон). Передача аудио аналогична
Конструкция интерфейса для PC
Конструкция интерфейса для PC Схема PC интерфейса приведена на рис. 15.5. В набор деталей PC интерфейса входит печатная плата, расположение деталей на которой показано на рис. 15.6. Рис. 15.5. Принципиальная схема интерфейса РС Рис. 15.6. Схема расположения деталей РС
Программирование интерфейса УРР
Программирование интерфейса УРР Программирование интерфейса УРР аналогично процедуре программирования УРР из набора, описанного в гл. 7. Для правильной работы руки-манипулятора вы должны запрограммировать командные слова соответственно номерам, соответствующим
Глава 6 Подключение новых устройств
Глава 6 Подключение новых устройств Общие сведенияПри самостоятельной настройке компьютера мало кому удавалось избежать вмешательства в устройство системного блока. Слишком много в нем различных проводов и соединений, чтобы быть уверенным в отсутствии необходимости
1.4. плата за технологическое подключение к электросетям
1.4. плата за технологическое подключение к электросетям Плата за технологическое подключение к электросетям является единственным реальным источником привлечения финансовых средств для удовлетворения потребностей электросетевого хозяйства, в том числе для усиления
Глава 3 Подключение дополнительной мощности
Глава 3 Подключение дополнительной мощности Мы находимся в такой ситуации, когда 80 % территории Москвы по техническим причинам невозможно присоединить. Анатолий Чубайс «Энергетика и промышленность России», 2006, № 6 3.1. Общие положения Подключение дополнительных
Глава 5 Несанкционированное подключение к электросетям
Глава 5 Несанкционированное подключение к электросетям Сразу же после дефолта 1998 г. в системе ОАО «Мосэнерго» было зафиксировано резкое возрастание количества хищений электроэнергии. «Вестник Мосэнерго», 2004,