Кисть руки андроида
Кисть руки андроида
Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев», необходимо купить две такие игрушки. Большой палец игрушки имеет фиксированное положение, и его нельзя использовать.
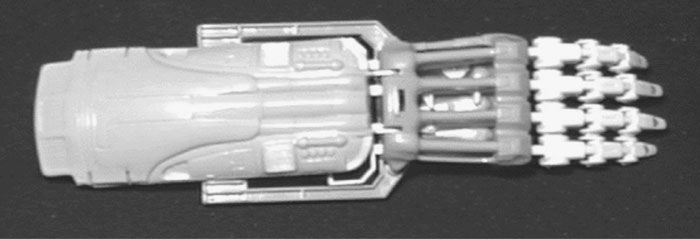
Рис. 16.17. Механическая рука Awesome компании Zima
Игрушка работает следующим образом: «пальцы» игрушки приводятся в действие пальцами оператора, т. е. игрушка представляет собой род дистанционного манипулятора. Чтобы сделать андроидную кисть руки, нам придется разобрать игрушки и удалить из них большинство деталей.
Когда вы перевернете руку, то вы увидите пять небольших винтов, которые скрепляют конструкцию. Отверните эти винты, и конструкция распадется на части (см. рис. 16.18). Вытащите «пальцевую» часть игрушки (см. рис. 16.19). Остальные части игрушки нам не потребуются. На конце стерженьков, которые управляют «пальцами», находятся «колечки», куда оператор вставляет пальцы при управлении игрушкой. Нам эти колечки не понадобятся, поэтому необходимо удалить их с помощью кусачек, оставив длинный пластиковый стержень.
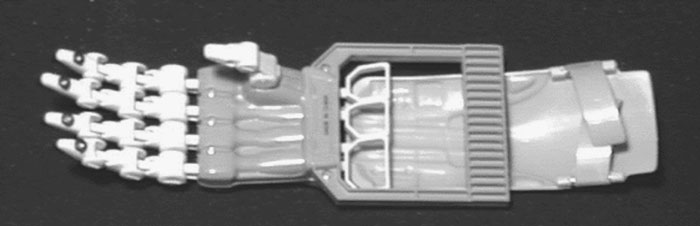
Рис. 16.18. Обратная сторона руки, где необходимо вывернуть крепежные винты
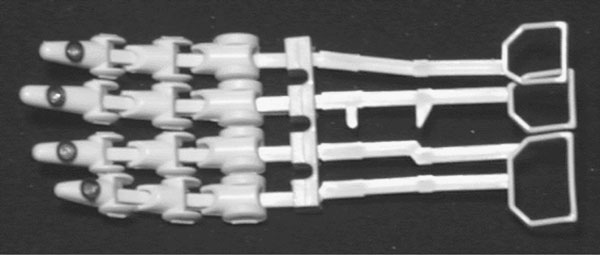
Рис. 16.19. Пальцы с тягами, извлеченные из руки
Детали конструкции собраны на плате. Я начал с того, что обвел контуры кисти моей правой руки на бумаге. Затем я зачернил некоторую внутреннюю часть рисунка (см. рис. 16.20). По контурам зачерненного рисунка я вырезал пластину из алюминия толщиной 3 мм.
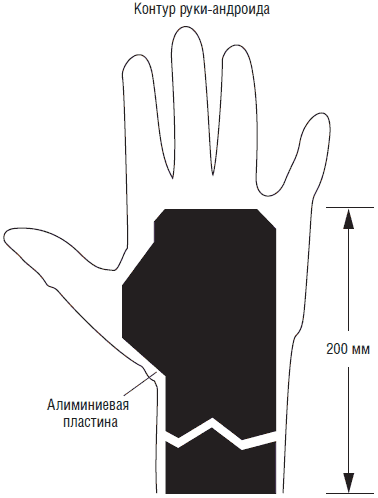
Рис. 16.20. Контур кисти руки и положение алюминиевого основания
Пальцы крепятся к концу платы. Сперва отметьте положение крепления пальцев на плате. Затем поместите небольшую алюминиевую пластину шириной 12 мм и толщиной 3 мм сразу за пластиковым креплением пальцев (см. рис. 16.21). Эта пластина представляет собой задний упор для крепления пальцев. Просверлите три отверстия сквозь пластинку и основание и прикрепите пластинку к основанию с помощью винтов и гаек. Укрепите алюминиевую пластинку 3x12 мм поверх пластикового основания крепления пальцев. Просверлите четыре отверстия в пластинке и плате, как это показано на рис. 16.22. Конструкция скрепляется с помощью винтов, длиной 25 мм и гаек. Эти винты имеют двойное назначение. Во-первых, они крепят основание пальцев и удерживают пальцы в конструкции. Во-вторых, к ним будет крепиться резиновая лента, обеспечивающая растяжение воздушных мышц.
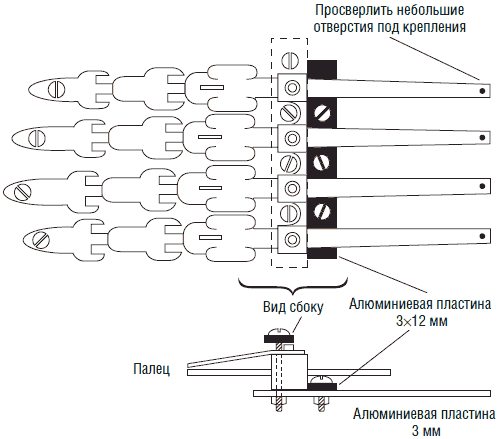
Рис. 16.21. Крепление задней пластинки
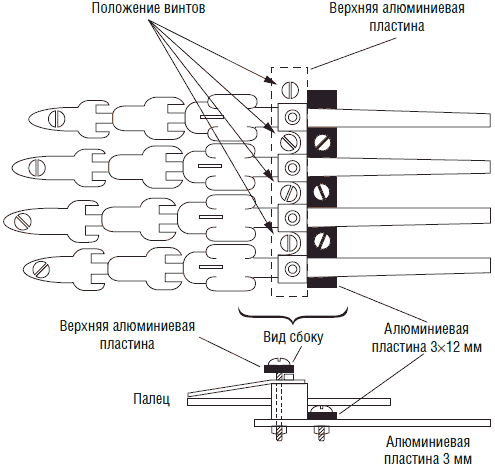
Рис. 16.22. Крепление верхней пластинки
После того как пальцы закреплены на плате, нам необходимо прикрепить к каждому пальцу воздушную мышцу. Напомню, что для правильного сокращения воздушной мышцы она должна быть предварительно растянута. Проденьте резиновую петлю через конец воздушной мышцы. Затем отверните и выньте первый из четырех винтов длиной 25 мм, которые крепят основание пальцев. Просуньте сложенные концы резиновой петли в то место, где винт проходит через верхнюю пластинку. Вставьте винт на место, продев через него концы резиновой петли, и затем затяните с помощью гайки (см. рис. 16.23 и 16.24).

Рис. 16.23. Продеть сложенную резиновую ленту через один конец воздушной мышцы и закрепить концы ленты на винте крепления верхней пластинки
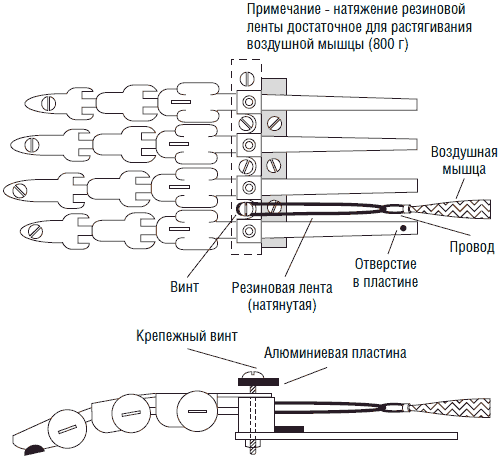
Рис. 16.24. Общий вид крепления воздушной мышцы к тяге пальца
Потяните воздушную мышцу за другой конец до того, как она будет полностью растянута. Заметьте положение конца воздушной мышцы. В этом месте просверлите отверстие в плате и вставьте туда винт, закрепленный с помощью гаек. Для поддержания воздушной мышцы в растянутом состоянии наденьте конечную петлю воздушной мышцы на винт (см. рис. 16.25).
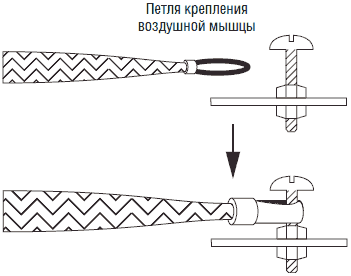
Рис. 16.25. Крепление заднего конца воздушной мышцы к крепежному винту для ее растяжки
Теперь просверлите небольшое отверстие в пластиковой части тяги пальца. Положение отверстия должно соответствовать положению передней петли крепления воздушной мышцы. Отверстие должно быть достаточно велико, чтобы в него проходил сложенный вдвое многожильный провод. Можно использовать оголенный одножильный медный провод 0,6 мм или многожильный стальной. Пропустите сложенный вдвое многожильный провод через отверстие в пластике и через отверстие петли переднего крепления мышцы. Скрепите детали путем скручивания концов провода. Если концы скрученного провода окажутся слишком длинными, то удалите излишки с помощью кусачек.
Примерный вид сверху показан на рис. 16.24. Теперь мы можем увидеть, каким образом будут сокращаться пальцы. Пальцы сокращаются при подаче сжатого воздуха в воздушную мышцу. Сократившаяся мышца воздействует на пластиковую тягу, управляющую пальцем, что в свою очередь вызывает его сокращение. Когда с воздушной мышцы снимается давление, то резиновая лента растягивает ее в первоначальное положение.
Теперь неплохо провести статическое испытание работы пальца. Соедините подачу воздуха с воздушной мышцей, чтобы убедиться в работоспособности устройства. В начальном варианте устройства для полного сгибания указательного пальца требовалось давление порядка 3 кгс.
Когда вы убедитесь, что палец работает правильно, присоедините воздушные мышцы к остальным пальцам таким же образом. На рис. 16.26 показан детальный вид воздушных мышц, соединенных с тягами соответствующих пальцев.
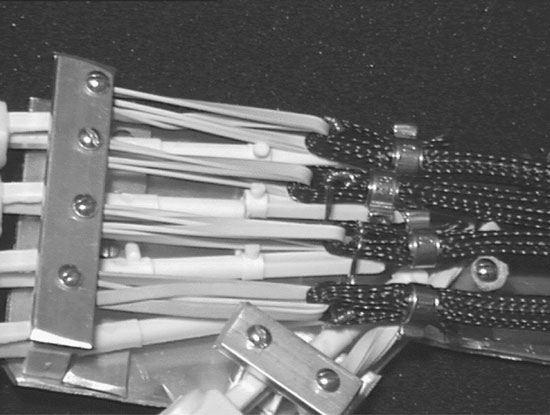
Рис. 16.26. Детальный вид воздушных мышц, резиновых лент и пальцевых тяг в сборе
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Глава 16 Кисть руки – андроида
Глава 16 Кисть руки – андроида В этой главе мы попробуем изготовить андроидную или человекоподобную кисть руки. Для приведения в движение пальцев этой руки мы будем использовать воздушные мышцы, описанные в гл. 3.Воздушная мышца представляет собой пневматическое
«Механические руки»
«Механические руки» История механических рук начинается с… атомной физики. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉