2.2.4. Определение погрешности частоты и величины вектора ошибки
Тестирование данного параметра должно производиться для передатчика, находящегося в состоянии ON. Погрешностью частоты называется мера отличия фактической частоты, на которой работает базовая станция, от назначенной управляющим блоком. Для генерации радиочастоты и генерации тактовой частоты должен использоваться один источник (данный факт проверке не подлежит, но должен быть заявлен производителем в соответствующей документации). Целью тестирования данного параметра является проверка соответствия величины погрешности частоты диапазону допустимых значений, указанному в таблице 1.4 в качестве минимальных требований. Для классов мощности базовых станций, отличных от большого радиуса действия, допускается снижение минимальных требований в соответствии с таблицей 2.7.
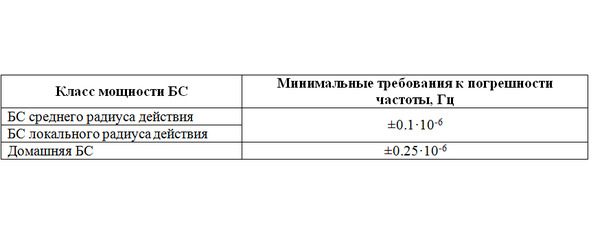
Таблица 2.7. Допустимые значения погрешности частоты для базовых станций различных классов мощности
Указанные в таблице 1.4 и таблице 2.7 требования к погрешности частоты каждой модулированной несущей должны выполняться при измерении за период времени не короче, чем период одного подкадра (1 мс).
Тестирование погрешности частоты производится совместно с тестированием величины вектора ошибки (EVM). Величина вектора ошибки является мерой отличия идеального расположения символов на фазовой плоскости от их расположения после проведения процедуры выравнивания эквалайзером. При этом параметры эквалайзера должны быть настроены в соответствии с рекомендациями, приведенными в приложении F.3.4 спецификации ETSI TS 136.141. Результирующая величина вектора ошибки определяется как корень квадратный из отношения измеренной средней мощности вектора ошибки к опорному (идеальному) значению средней мощности (выражается в процентах). Целью тестирования величины вектора ошибки является проверка на соответствие минимальным требованиям, указанным в таблице 1.4.
Перед началом тестирования необходимо обеспечить нормальные условия среды тестирования. Допустимые значения соответствующих параметров окружающей среды указаны в таблице 2.6.
В режиме работы с одной несущей тестированию подлежат радиочастотные каналы нижнего, среднего и верхнего положений в рабочем диапазоне частот соответственно. В режиме работы с несколькими несущими и/или с использованием функции объединения несущих рассматривается две ситуации: при работе в одной полосе частот и в нескольких. В первой ситуации тестированию подлежат полосы радиочастот, расположенные в нижнем, среднем и верхнем участках каждого рабочего диапазона частот соответственно. Во второй ситуации тестированию подлежат две полосы радиочастот: полоса, расположенная в нижней части поддерживаемого частотного диапазона самой низкой рабочей полосы частот и на самом высоком возможном в случае одновременной работы участке в пределах максимальной поддерживаемой ширины полосы частот в самой верхней (допустимой) рабочей полосе частот; и полоса, расположенная в верхней части поддерживаемого частотного диапазона самой верхней рабочей полосы частот и на самом низком возможном в случае одновременной работы участке в пределах максимальной поддерживаемой ширины полосы частот в самой низкой (допустимой) рабочей полосе частот. Определение положений тестируемых полос частот в режиме работы с несколькими несущими и/или с использованием функции объединения несущих должно производиться с учетом рекомендаций, приведенных в пп. 4.7.1 спецификации ETSI TS 136.141.
Для проведения тестирования необходимо соединить анализатор сигналов с антенным коннектором базовой станции в соответствии с общей схемой рабочего места, приведенной в приложении I.1.1 спецификации ETSI TS 136.141.
Процедура тестирования включает в себя следующие шаги. Во-первых, необходимо настроить параметры физических каналов в соответствии с определенной тестовой моделью. Для базовых станций, поддерживающих режим работы только с одной несущей, необходимо использовать E-TM3.1 при выходной мощности, заявленной производителем в качестве номинальной. Для базовых станций, поддерживающих режим работы с несколькими несущими и/или с использованием функции объединения несущих, необходимо использовать E-TM3.1 для настройки всех несущих при использовании соответствующей тестовой конфигурации, определяющей настройки мощности. Во-вторых, необходимо измерить величину вектора ошибки и погрешность частоты при помощи анализатора сигналов с учетом рекомендаций, приведенных в приложении F спецификации ETSI TS 136.141. Данные рекомендации содержат описание настройки параметров анализатора сигналов для проведения процедур тестирования и уточненную схему рабочего места (с функциональной схемой анализатора сигналов в ее составе) с обозначением точек, в которых следует снимать показания.
Единичная величина вектора ошибки должна оцениваться для 12 поднесущих (180 кГц) на протяжении периода 1 подкадра, то есть для 2 ресурсных блоков. Для измерений следует использовать только ту пару ресурсных блоков, которая содержит максимальное количество ресурсных элементов с информацией канала PDSCH при использовании заданного вида модуляции. Для ширины полосы частот 1.4 МГц число таких ресурсных элементов должно составлять не менее 138, для прочих значений ширины полосы частот – не менее 150. Несмотря на то, что единичная величина вектора ошибки оценивается на протяжении периода 1 подкадра, следует учесть, что показания EVM снимаются после прохождения эквалайзера. Часто с целью уменьшения влияния шума на опорные символы эквалайзер производит корректировку на промежутке из N подкадров. В этом случае минимальным требованиям, указанным в таблице 1.4, должно соответствовать максимальное среднеквадратичное значение EVM на промежутке из N подкадров. Как правило, используется корректировка на промежутке не менее, чем из N = 10 подкадров (границы данного промежутка могут не совпадать с границами кадра во временной области), поэтому минимальным требованиям должно соответствовать не только единичное значение величины вектора ошибки, но и максимальное среднеквадратичное значение, рассчитанное для 10 подкадров при соблюдении описанных рекомендаций. Для всех значений ширины полосы частот, при работе с несколькими несущими, необходимо измерить величину вектора ошибки для каждой из несущих на протяжении 10 подкадров, а затем вычислить максимальное среднеквадратичное значение. Полученное значение должно удовлетворять минимальным требованиям, указанным в таблице 1.4. Далее следует повторить первый и второй шаги для тестирования параметра EVM при тестовых моделях E-TM3.2, E-TM3.3 и E-TM2. Если базовая станция поддерживает работу с видом модуляции КАМ-256, то также следует повторить первый и второй шаги процедуры тестирования при тестовых моделях E-TM3.1a и E-TM2a. При использовании тестовых моделей E-TM2 и E-TM2a мощность OFDM символа должна соответствовать самому низкому значению динамического диапазона выходной мощности. При тестировании в какой-либо полосе частот базовых станций, способных работать в нескольких полосах частот, необходимо на время проведения теста деактивировать несущие в прочих полосах частот. Также следует учесть, что при тестировании базовых станций, работающих в нескольких полосах частот при использовании раздельных антенных коннекторов, не задействованные антенные коннекторы на время проведения теста должны быть отключены.
Минимальные требования к величине вектора ошибки также должны выполняться для временного окна, имеющего центр, совпадающий с центром циклического префикса. В таблице 2.8 приведены соответствующие значения длительности указанного окна для различных значений ширины полосы частот и значений длительности нормального циклического префикса соответственно. Длительность указана во временных единицах, обозначаемых Ts (Ts = 1/3072000 ? 0.0325 мкс).
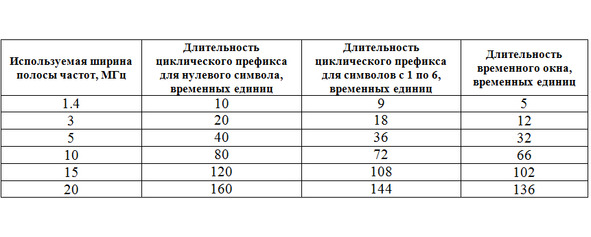
Таблица 2.8. Значения временных интервалов для измерения EVM
При проведении подобных измерений для 10 подкадров необходимо рассчитать максимальное среднеквадратичное значение величины вектора ошибки. Полученное значение должно соответствовать минимальным требованиям, указанным в таблице 1.4.
Минимальные требования к величине вектора ошибки для КАМ-256 применимы для всех классов мощности базовых станций, кроме большого радиуса действия. Измеренные при различных видах модуляции значения величины вектора ошибки каждой несущей должны быть меньше значений, указанных в таблице 1.4 в качестве минимальных требований, с учетом допустимых погрешностей. Измерение погрешности несущей частоты должно производиться посредством сравнения фактического значения с эталонным. Фактическое значение должно быть получено при измерении сигнала до прохождения блока быстрого преобразования Фурье анализатора сигналов.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.