Компьютерный интерфейс
Компьютерный интерфейс
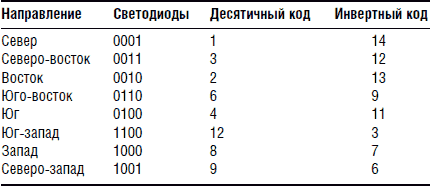
Четыре линии выхода компаса формируют 4-разрядное двоичное число (полубайт), которое можно легко считать с помощью микроконтроллера, компьютера или иной схемы (см. табл. 5.4). До момента рассмотрения схемы работы PIC микроконтроллера 16F84 в гл. 7 мы не будем рассматривать схемы его подключения.
Таблица 5.4. Назначение светодиодов
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
4.2.3.1. Интерфейс для Хола: вариант 1. Диалоговое окно
4.2.3.1. Интерфейс для Хола: вариант 1. Диалоговое окно Инструкции в диалоговом окне (рис. 4.2) довольно просты. На их основе можно описать метод действий, который должен использовать Хол в терминах жестов модели GOMS. Запись по модели GOMS будет представлена последовательно по
4.2.3.3. Интерфейс для Хола: вариант 2. ГИП (GUI, graphical user interface)
4.2.3.3. Интерфейс для Хола: вариант 2. ГИП (GUI, graphical user interface) Рис. 4.3. ГИП для задачи ХолаВ интерфейсе, показанном на рис. 4.3, используется наглядное отображение термометров. Хол может поднять или опустить указатель на каждом термометре методом перетаскивания с помощью ГУВ.
Интерфейс датчиков неровностей поверхности
Интерфейс датчиков неровностей поверхности При управлении автомобилем через систему телеслежения вы не можете чувствовать наклона или неровностей дороги, по которой движется автомобиль. Для введения «чувства» неровностей дороги в систему вы можете использовать
Интерфейс датчика наклона
Интерфейс датчика наклона Точно так же, как для интерфейса датчиков неровностей поверхности, можно использовать различные датчики-преобразователи для определения наклона (см. гл. 5). В одном из датчиков используется стальной шарик в пластиковой оболочке. При наклоне
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления Данный проект представляет собой многоуровневую модульную задачу. Первый этап проекта – сборка модуля роботизованной руки-манипулятора, поставляемой в виде набора деталей. Вторым
IBM интерфейс
IBM интерфейс Управление с помощью компьютера очень просто. Компьютер управляет электрическим трехпозиционным клапаном. Недорогие трехпозиционные, управляемые с помощью электрического соленоида воздушные клапаны имеются в продаже (см. рис. 16.15). Воздушный клапан
Глава 1 Общие сведения и интерфейс Adobe Premiere
Глава 1 Общие сведения и интерфейс Adobe Premiere Вступительная глава посвящена первому знакомству с Adobe Premiere 6.5, описанию его интерфейса и рассмотрению основных принципов монтажа видеофильмов с помощью этого приложения. Сначала приводятся базовые понятия и приемы монтажа,
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉