Голосовое управление рукой-манипулятором
Голосовое управление рукой-манипулятором
B голосовом управлении рукой-манипулятором используется набор распознавания речи (УРР), который был описан в гл. 7. В этой главе мы изготовим интерфейс, связывающий УРР с рукой-манипулятором. Этот интерфейс также предлагается в виде набора компанией Images SI, Inc.
Схема интерфейса для УРР показана на рис. 15.11. В интерфейсе использован микроконтроллер 16F84. Программа для микроконтроллера выглядит следующим образом:
‘Программа интерфейса УРР
Symbol PortA = 5
Symbol TRISA = 133
Symbol PortB = 6
Symbol TRISB = 134
Poke TRISA, 255
Poke TRISB, 240
Start:
Peek PortB, B0
If bit4 = 0 then trigger ‘Если запись в триггер разрешена, читать схе
му УРР
Goto start ‘Повторение
trigger:
pause 500 ‘Ожидание 0,5 с
Peek PortB, B0 ‘Чтение кода BCD
If bit5 = 1 then send ‘Выходной код
goto start ‘Повторение
send:
peek PortA, b0 ‘Чтение порта А
if bit4 = 1 then eleven ‘Число есть 11?
poke PortB, b0 ‘Выходной код
goto start ‘Повторение
eleven:
if bit0 = 0 then ten
poke portb, 11
goto start ‘Повторение
ten:
poke portb,10
goto start ‘Повторение
end
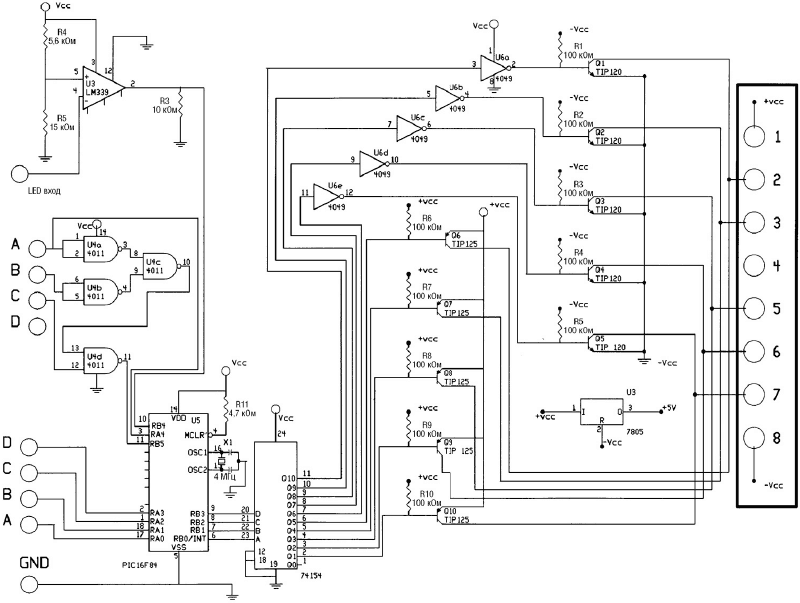
Рис. 15.11. Схема контроллера УРР для руки-робота
Обновление программы под 16F84 можно бесплатно загрузить из http://www.imagesco.com
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
3.1. Управление безопасностью в ОУ
3.1. Управление безопасностью в ОУ Под управлением безопасностью понимается процесс сознательного, целенаправленного и организованного воздействия на элементы ОУ и окружающей среды в целях защиты персонала, обучающихся, воспитанников, имущества и среды ОУ от
3.2. Управление рефлексом
3.2. Управление рефлексом Сколь бы ни была совершенна нервная сеть, построенная по принципу сложного рефлекса, она обладает одним существенным недостатком: неизменностью функционирования во времени. Животное с такой нервной системой ничего не может извлечь из своего
4.1. Управление ассоциированием
4.1. Управление ассоциированием Мы подошли к самому волнующему моменту в истории жизни на Земле — появлению мыслящего существа, человека. Логика нашего повествования побуждает нас связать возникновение мышления с очередным метасистемным переходом. В настоящее время мы
6.5. Управление освещением
6.5. Управление освещением Общие требованияВопрос 479. Можно ли управление наружным освещением сделать общим с управлением внутренним освещением?Ответ. Управление наружным освещением должно выполняться независимым от управления внутренним освещением.Вопрос 480. В каких
5 Управление качеством
5 Управление качеством Если разработку программного средства документируют в соответствии со стандартом по управлению качеством, положения данного стандарта в равной мере применяют как к самой разработке, так и к соответствующей документации.Примечание — Даже если
15.3. Управление оборудованием
15.3. Управление оборудованием Вопрос 449. В каких оперативных состояниях могут находиться тепловые энергоустановки организации, принятые в эксплуатацию?Ответ. Могут находиться в одном из четырех оперативных состояний: работе, резерве, ремонте или консервации (п.
4.3 Управление документацией
4.3 Управление документацией 4.3.1 Общие положения Лаборатория должна установить и поддерживать процедуры управления всеми документами, являющимися частью системы качества (разработанными в рамках лаборатории или поступившие извне), такими как регламенты, стандарты,
2.5. Управление проектами
2.5. Управление проектами Управление проектами в Premiere организовано очень сходным образом со стандартными приложениями Windows. Проекты создаются, сохраняются в файлах и могут быть открыты и закрыты, подобно, например, документам Microsoft Word. Основное отличие касается
4.2. Управление окном Timeline
4.2. Управление окном Timeline Мы разобрались в том, что компоновка фильма сводится к размещению экземпляров клипов в окне Timeline (Монтаж) в надлежащем порядке. Прежде чем обратиться непосредственно к приемам монтажа в этом окне (см. разд. 4.3), разберемся в возможностях управления
7.7. Управление проектами и всеобщее управление качеством
7.7. Управление проектами и всеобщее управление качеством Эффективное реформирование экономики России невозможно без применения адекватной методологии управления. В настоящее время сформировался новый организационно-экономический подход к реализации политики
Рулевое управление
Рулевое управление Рулевым управлением изменяют направление движения автомобиля путем поворота передних колес. Рулевое управление включает в себя рулевой механизм и рулевой привод.Для обеспечения движения колес автомобиля на повороте без бокового скольжения
5.12.4 Управление субподрядчиком
5.12.4 Управление субподрядчиком Если в проекте принимают участие субподрядчики, разработчик должен включить в контракт все договорные требования, необходимые для гарантии, что ПО будет разработано в соответствии с требованиями
13.1.5 Управление конфигурацией ПО
13.1.5 Управление конфигурацией ПО Если используют ранее разработанное ПО, то процесс управления конфигурацией ПО для нового применения должен включать в себя дополнительно к рекомендациям раздела 9 следующее:— трассируемость от программного средства и его документов