Глава 1 Принцип работы квадрокоптера

Квадрокоптеры, которым посвящена эта книга, являются частным случаем мультикоптеров — многороторных устройств, которые держатся в воздухе, управляются и перемещаются только за счет несущих пропеллеров. В этом мультикоптеры схожи с вертолетами. Для простоты и краткости в обиходной речи мультикоптеры часто называют просто коптерами. Мы тоже будем использовать этот термин в случаях, когда количество роторов не играет роли.
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы (рис. 1.1).
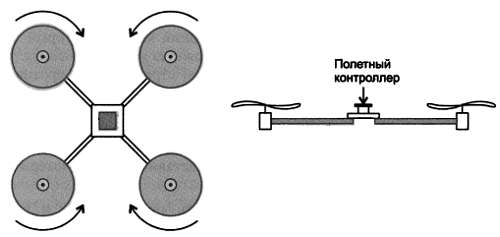
Рис. 1.1. Схема конструкции простейшего квадрокоптера
Воздушные винты, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу. Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать или опускаться. Если изменить обороты моторов неравномерно, то квадрокоптер отклонится от горизонтального положения и полетит в сторону отклонения. Например, при увеличении оборотов двух задних моторов его задняя часть приподнимется и квадрокоптер полетит вперед. За счет неравномерного изменения оборотов всех моторов квадрокоптер способен лететь в произвольном направлении.
Очевидно, что при наклоне рамы за счет появления горизонтальной составляющей вектора тяги Vx уменьшится вертикальная составляющая Vy и квадрокоптер начнет терять высоту. Это явление иногда называют "соскальзыванием", потому что коптер начинает двигаться вниз по диагональной траектории (рис. 1.2), словно скользя по склону. Поэтому для поддержания высоты при наклоне квадрокоптера обороты всех моторов должны возрасти на некую одинаковую компенсирующую величину.
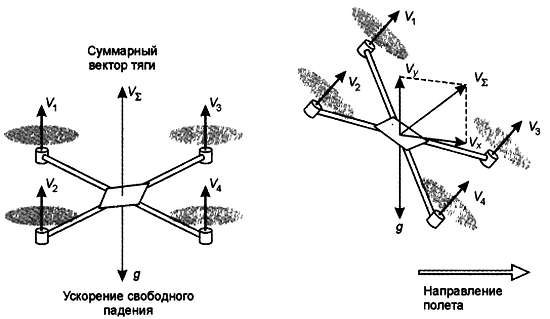
Рис. 1.2. Векторы тяги квадрокоптера
Вращающиеся винты создают реактивный крутящий момент, который старается развернуть квадрокоптер в сторону, противоположную вращению винта. Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая реактивные моменты. Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты у вращающихся против часовой стрелки, то суммарная вертикальная тяга не изменится, однако реактивный момент раскомпенсируется и рама начнет поворачиваться против часовой стрелки. Аналогично можно заставить квадрокоптер поворачиваться по часовой стрелке.
Угловые отклонения по осям следовало бы называть "тангаж", "крен" и "рыскание", но на практике прижились англоязычные термины, которые читателю следует запомнить: Pitch (наклон вперед-назад), Roll (наклон вправо-влево), Yaw (вращение в горизонтальной плоскости) и Throttle (общий газ) — рис. 1.3.
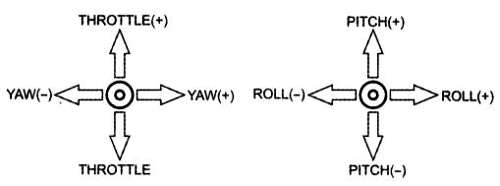
Рис. 1.3. Соответствие отклонений коптера рычагам на пульте
Оборотами моторов в режиме реального времени управляет специальная вычислительная система на основе достаточно быстродействующего микроконтроллера, так называемый полетный контроллер. Он постоянно опрашивает встроенные гироскопы, акселерометры, барометр, сигналы от приемника радиоуправления и на основе полученных данных рассчитывает управляющие сигналы для каждого мотора в отдельности.
Теперь, когда мы рассмотрели общие принципы работы квадрокоптера, можно проанализировать достоинства и недостатки этого типа летательных аппаратов.
Достоинства
• Простота конструкции и низкая стоимость ущерба при аварии.
Как мы уже говорили, квадрокоптеры держатся в воздухе только за счет несущих пропеллеров и этим похожи на вертолет. Однако полноценная модель вертолета имеет весьма сложную и точную механическую часть — автомат перекоса, позволяющий управлять положением вертолета в пространстве. Кроме этого, вертолет оснащен механизмом отбора мощности на хвостовой винт и узлом переменного шага этого винта. Только простые и дешевые маленькие модели вертолетов не имеют автомата перекоса, но и управляются они намного хуже. По сравнению с вертолетом механическая часть даже у большого профессионального квадрокоптера предельно проста и не зависит от размеров модели. Это жестко закрепленные на лучах рамы моторы, на валы которых надеты воздушные винты.
Автомат перекоса вертолета требует сложной и длительной регулировки даже при наличии опыта. Каждая авария вертолета, даже незначительная, как правило, дорого обходится владельцу (автор убедился в этом на собственном опыте). Причем в запасе приходится держать широкий ассортимент различных запчастей. Самодельный квадрокоптер можно разбить почти полностью и восстановить за один выходной день, пользуясь в основном подручными материалами. В запасе достаточно иметь пару запасных валов и подшипников для моторов, один-два регулятора оборотов, десяток винтов правого и левого вращения и материал для изготовления лучей рамы.
• Простота управления и обучения.
Несмотря на то, что квадрокоптер, как и вертолет, управляется за счет смещения вектора тяги, он более стабилен в воздухе (чем крупнее, тем стабильнее). Управление квадрокоптером интуитивно более понятно и легче осваивается. Кроме того, благодаря наличию полетного контроллера, правильно собранный и минимально настроенный квадрокоптер способен висеть в воздухе практически без участия пилота.
• Простота самостоятельного изготовления.
Если заранее приобрести минимальный набор необходимых компонентов и иметь обычные инструменты, то изготовить простой, но качественный квадрокоптер можно за один-два выходных дня. При создании рамы можно обойтись парой кусков фанеры и несколькими деревянными рейками, и это не ухудшит летные качества устройства.
• Возможности для творчества.
К сожалению, в последнее время радиолюбителям все труднее найти прикладную область для своего хобби. Многое из того, что можно было бы изготовить своими руками, проще и дешевле купить в готовом виде, с промышленным качеством. В схожей ситуации сейчас и программисты-любители. Писать любительские прикладные программы стало либо слишком сложно, либо незачем.
Квадрокоптеры придают новый смысл многим увлечениям. Можно участвовать в разработке открытого программного обеспечения или создавать свое; разрабатывать с нуля и изготавливать на самодельном станке с ЧПУ сложные детали конструкции; экспериментировать с аэровидеосъемкой или работать паяльником. Менять и развивать конструкцию самодельного квадрокоптера можно практически бесконечно.
Недостатки
• Полное отсутствие летучести.
Квадрокоптер хорошо летает, только пока полностью исправен. Стоит выйти из строя одному из моторов или полетному контроллеру, как летательный аппарат потеряет управление и рухнет, беспорядочно кувыркаясь. В аналогичной ситуации вертолет способен к авторотации, т. е. тормозит падение за счет вращения несущего винта набегающим потоком воздуха, а самолет способен планировать. Даже наличие шести или восьми несущих винтов не спасает мультикоптеры от крушения. Некоторым опытным пилотам удавалось спасти гекса- и октакоптеры при отказе одного из моторов, но это исключение из правила.
• Высокий порог знаний.
Можно купить готовый квадрокоптер и запускать его, не задумываясь, как он работает. Но если вы решили сами строить квадрокоптер или модернизировать покупной, то придется хотя бы на начальном уровне научиться понимать радиосхемы, паять, прошивать микроконтроллеры, читать технические тексты на английском языке, разбираться в принципе работы GPS и т. д…
• Низкая динамика и управляемость.
Обратная сторона стабильности квадрокоптеров — вялость и инерционность в управлении. Особенно вяло квадрокоптеры управляются по курсу (Yaw). Поэтому на квадрокоптере невозможно исполнить традиционные фигуры высшего пилотажа самолетов или инверсный полет, как на модели вертолета. Впрочем, при наличии опыта на коптере можно эффектно исполнить переворот или пролет по кругу с вращением вокруг оси. Но здесь надо понимать, что каждый летательный аппарат хорош для своих целей, и вялость в управлении вряд ли является недостатком, когда речь идет о полетах по камере, видеосъемке или развлечении в выходной день. Для динамичных полетов имеет смысл приобрести или построить модель спортивного самолета, у которой, ^кстати, тоже будут специфичные недостатки.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК