ЗАОЧНАЯ ШКОЛА РАДИОЭЛЕКТРОНИКИ Магнитный рулевой

Модель, оснащенная солнечной батареей, могла бы проплыть сотни и тысячи километров. А если на ней установить к тому же спутниковую систему навигации, она сможет пересекать моря и океаны, точно попадая в порт назначения.
К сожалению, сделать такую модель пока никто еще не решился. Но можно начать с малого. Перед вами модель озерного парома, которую ведет автоштурман, использующий способность магнитной стрелки всегда ориентироваться на север.
При курсовых эволюциях модели будет изменяться заданный угол между направлением север — юг компасной стрелки и продольной осью «корабля» (рис. 1).
Отклонения этого угла должны восприниматься датчиком рассогласования (ДР) и в виде электрических сигналов поступать на электронный усилитель (У), способный управлять противодействующим рулевым органом (РО). Для простоты и наглядности можно отказаться от погруженного в воду руля и держать курс воздушным винтом. При этом ходовой винт остается. Основная тонкость нашей системы управления связана с чрезвычайно малой мощностью магнитной стрелки. Будь она посолиднее, можно было бы механически связать со стрелкой сельсин либо круговой потенциометр, тем не менее можно установить на стрелке легчайший лепесток-зеркальце из полированной алюминиевой фольги, направив на него световые лучи с обеих сторон. Эти лучи улавливают две оптопары, установленные на общем поворотном кольце, окружающем корпус компаса (рис. 2).
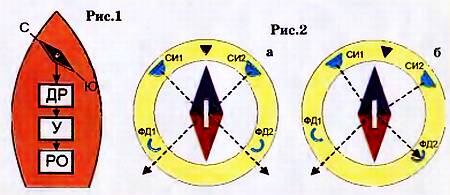
Роль зеркального лепестка — в определенных случаях отразить лучик светоизлучателя (СИ) данной оптопары на ее фотодатчик (ФД) для выработки управляющего электрического сигнала.
Перед пуском модели ее нацеливают на конечный пункт маршрута и устанавливают кольцо с оптопарами так, чтобы треугольный индекс находился против острия стрелки компаса. При таком положении лучи от светоизлучателей СИ1, СИ2 (рис. 2а) не попадают в фотодатчики ФД1, ФД2 и коррекции курса модели не происходит.
Если же по какой-то причине судно отклоняется от курса, например, вправо (рис. 2б), свет от излучателя СИ2 достигает датчика ФД2, и тот выдает команду на исправление курса. Чем заметнее рассогласование курса, тем значительнее сигнал и корректирующее действие.
Фотодатчики R3 и R5 включены в плечи входной цепи усилителя (рис. 3).

В качестве излучателей света использованы светодиоды VD1, VD2. Полученные с делителей напряжения R3, R4 и R4, R5 сигналы предварительно усиливаются каскадами на транзисторах VT1, VT3 и VT2, VT4 и управляют двухтактным выходным каскадом на транзисторах VT5, VT6. В зависимости от того, какой из них открыт, привод M1 воздушного (рулевого) винта вращается в ту или иную сторону.
Привод ходового водяного винта М2 получает питание сразу от двух батарей GB1, GB2 через токоограничительный резистор R15, что не очень экономично, зато обеспечивает одинаковый расход источников питания.
Примерный облик кораблика изображен на рисунке 4.

В передней части корпуса располагается сравнительно низкий «пассажирский салон» из оргстекла — это упростит установку кольца с датчиками относительно магнитной стрелки. Оптопары необходимо закрыть светонепроницаемыми козырьками во избежание помех от наружного освещения. Светоприборы соединены с усилителем гибкими многожильными проводничками. В трюме под компасом разместите плату усилителя и батареи питания, к примеру, типа 3LR12. За пассажирским салоном, в кормовой части, укрепите воздушный киль, в проеме которого разместите воздушный рулевой винт. Для уменьшения влияния волн на магнитную стрелку и зеркальный отражатель компас установите на поролоновую прокладку, проведите балансировку винтов, а в конструкции избегайте применения стальных деталей.
Ю. ГЕОРГИЕВ
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК