9. РАДИОЛОКАЦИЯ
9. РАДИОЛОКАЦИЯ
Глава рассказывает о спрутax-звукоулавливателях, возникновении и развитии советской радиолокации, первых опытах по обнаружению самолетов с помощью радиоволн, гибели немецких и американских линкоров и многом другом, что может очень заинтересовать не только любителей военно-приключенческой литературы. В частности, посмотрим на арбуз с расстояния полутора тысяч километров, обсудим проблему небесных «ангелов», поговорим об обнаружении ливневых облаков и составлении подробных карт в плохую погоду.
Что такое радиолокация?
Когда вы стоите на краю обрыва, а перед вами, за рекой, стеной поднимается крутой берег, заросший густым лесом, трудно удержаться, чтобы не крикнуть или громко не хлопнуть в ладоши. В ответ раздается эхо. То что вы делаете, называется звуколокацией.
Звук, отраженный от противоположного берега, запаздывает во времени и искажается, часть его накладывается на посылаемый звук, и начало фразы принять (услышать) уже нельзя, а конец фразы звучит вполне отчетливо. Налицо многие проблемы, встречающиеся в радиолокации.
Звуколокация.
О принципах радиолокации вы, читатель, уже наверняка немало наслышаны. Мощный луч радиолокационного передатчика фокусируется большой антенной в направлении исследуемого объекта цели, как говорят специалисты по радиолокации. Разумеется, это название пошло от военных, для которых, собственно, и создавались первые радиолокаторы. Теперь уже у радиолокатора (радара) появилась масса мирных профессий, о которых мы еще поговорим. Итак, «цель» облучена зондирующим сигналом (привыкайте к радиолокационной терминологии!). Целью может быть самолет, корабль, ракета, поверхность Земли или другой планеты. Радиоволны рассеиваются целью, а часть их приходит назад к радару, где и регистрируется приемником. Итак, первая задача радиолокации — обнаружение цели решена. Вторая задача сложнее надо определить координаты цели. На уроках физики и математики вас учили, что прежде, чем измерять координаты, надо задать систему координат. Разные радары работают в различных системах координат. Сразу становится ясно, что чем «тоньше» луч радара, т. е. чем уже диаграмма направленности его антенны, тем точнее можно определить координаты цели.

Система координат обзорной РЛС:
? — азимут; ? — угол места: R — наклонная дальность
Для слежения за целью антенну надо поворачивать. Различают два основных режима работы РЛС: режим обзора (сканирования) пространства и режим слежения за целью. В режиме обзора луч РЛС по строго определенной системе просматривает все пространство или заданный сектор. Антенна, например, может медленно поворачиваться по азимуту и в то же время быстро наклоняться вверх и вниз, сканируя по углу места. В режиме слежения антенна все время направлена на выбранную цель и специальные следящие системы поворачивают ее вслед за движущейся целью.
Третья координата — дальность-определяется по запаздыванию отраженного сигнала относительно излучаемого. Так и хочется сказать, что запаздывание сигнала очень мало, поскольку радиоволны распространяются со скоростью света, равной 300000 км/с, или 3·108 м/с. Действительно, для самолета, находящегося на расстоянии 3 км от РЛС, запаздывание составит всего 20 мкс (20·10-6 с). Такой результат получился из-за того, что радиоволна проходит путь в обоих направлениях, к цели и обратно, так что общее расстояние, пройденное волной, составит 6 км. Но вот при радиолокации Марса, успешно проведенной в начале 60-х годов, задержка сигнала составила около 11 мин, а это время уж никак не назовешь малым!
И еще один аспект этой интереснейшей техники. Если посланный сигнал будет «путешествовать» в просторах космоса целых 11 мин, насколько же он ослабнет! И как выделить его в приемнике из собственных шумов приемника и шумов космического происхождения? Ослабление сигнала при радиолокации вполне поддается расчету, который основан на простых физических соображениях. Их мы уже рассматривали в гл. 4. Если в какой-то точке излучается мощность Р, то поток мощности через единичную площадку, находящуюся на расстоянии R, будет пропорционален P/4?R2. В знаменателе стоит площадь сферы радиусом R, окружающей источник. Таким образом, при обычной радиосвязи мощность, принятая нами, обратно пропорциональна квадрату расстояния. Этот закон — закон сферической расходимости пучка энергии выполняется всегда при распространении волн в свободном пространстве.
Поток энергии через единичную площадку обратно пропорционален квадрату расстояния.
Даже если мы сконцентрируем излучаемую мощность в узкий луч и поток энергии возрастет в несколько раз (этот коэффициент называется коэффициентом направленного действия антенны, сокращенно КНД), квадратичная зависимость от расстояния сохранится. В радиолокации дело обстоит значительно хуже. Облучаемая на расстоянии R цель сама рассеивает энергию по всем направлениям. И если облучающий цель поток энергии ослабевает обратно пропорционально R2, то приходящий к приемнику рассеянный поток еще ослабляется во столько же раз и оказывается обратно пропорциональным R4. Это означает, что для повышения дальности действия РЛС в 2 раза при прочих равных условиях мощность ее передатчика надо повысить в 16 раз. Вот какой дорогой ценой достигаются высокие характеристики современных РЛС!
Приведу несколько конкретных примеров. Возьмем небольшую аэродромную РЛС с антенной площадью 10 м2. И пусть она наблюдает небольшой самолет с эффективной поверхностью рассеяния[2] 5 м2 на длине волны 10 см. Работоспособность такой РЛС сейчас ни у кого не вызывает сомнений. Однако расчет показывает, что отраженный сигнал, приходящий в приемник при удалении самолета на 80 км, в этом случае на 16 порядков слабее излучаемого! Как говорят инженеры, потери сигнала при локации составляют 10-16. или 160 дБ. Но их это не пугает. При излучаемой мощности 10 кВт чувствительность приемника должна составить 10-12 Вт. Такие приемники научились делать еще в годы второй мировой войны!
Другой пример. Заставим нашу РЛС осуществлять локацию Марса. Дело это, разумеется, совершенно безнадежное, если не принять специальных мер. Увеличим площадь антенны до 1000 м2. И даже в этом случае потери сигнала на трассе составят 250 дБ, или 1025. Понадобятся сверхмощный передатчик и особые методы приема сигналов, уровень которых лежит гораздо ниже уровня собственных шумов приемника. К одному из таких методов относится когерентное накопление сигнала. Сеансы локации проводятся много раз, и отраженные сигналы суммируются. Амплитуда суммарного сигнала после суммирования n посылок возрастает в n раз, тогда как амплитуда статистически независимых шумов — только в ?n раз. При достаточно длительном времени накопления удается выделить чрезвычайно слабые отраженные сигналы. В первых опытах по локации Марса время накопления составляло 8.5 ч.
Существует великое множество радиолокаторов. Это и только что упомянутый «планетный», представляющий собой уникальный комплекс сооружений со сверхмощными передатчиками и ЭВМ для обработки сигналов, увенчанный полноповоротной антенной-чашей диаметром 75 м (только представьте себе грандиозность этого сооружения!). Это и миниатюрный, почти карманный радар работника автомобильной инспекции, позволяющий в считанные секунды определить скорость движущегося по шоссе автомобиля. Радарами оснащены теперь все морские и речные суда, все самолеты. Жизнь и деятельность в самых отдаленных уголках страны даже трудно представить себе без радаров.
Когда во время экспедиции гидрографическое судно шестой день не выходило из тумана в районе Курильских островов и Камчатки, я никак не мог понять, как же эти места осваивали и исследовали первопроходцы? Каждую ночь, каждый туманный день они должны были быть настороже — не послышится ли по носу судна плеск воды, накатывающейся на рифы. А в случае крушения помощи ждать неоткуда места не заселены, а карт и лоций нет — именно первопроходцы их и составляли.
Теперь все не так. По ворсистой ковровой дорожке, идеально чистой на гидрографическом судне, ты идешь к навигаторам, и они покажут карту, где со скрупулезной точностью нанесены мели, берега и глубины. Покажут и экран РЛС кругового обзора, где электронный луч непрерывно рисует ту же карту, получаемую радаром в этот самый момент. Видим на ней и берега, и рифы, и проходящие мимо корабли. А окна рубки «занавешены» туманом, и не видно даже передней мачты. Этому чудо-прибору, радару, не более 50 лет.
Начало радиолокации
В 30-х годах нашего столетия сгущались тучи на политическом горизонте Европы, да и всего мира. Набирал силу и наглел фашизм в Германии, Италии, в Японии поговаривали о мировом господстве. Страны оси Рим-Берлин-Токио лихорадочно вооружались. Росли скорости, вооруженность и дальность полета самолетов. Появилась настоятельная необходимость в обнаружении и определении координат воздушных целей. Но как это сделать?
Имевшаяся в это время звуколокационная техника уже не могла работать удовлетворительно. Тем не менее звукоулавливатели разрабатывались, и на октябрьских парадах возили по Красной площади похожие на спрутов установки с черными рупорами и переплетением трубок. «Слухач» звукоулавливателя наводил рупоры в направлении места, откуда исходил звук от летящего самолета. Но скоростной самолет улетал в это время далеко… К тому же звук «относился» ветром. А обычные методы визуального наблюдения оказывались бесполезными, как только самолет скрывался за облаками. Прожекторы да звукоулавливатели — вот и вся техника, которая была в распоряжении военных к середине 30-х годов. И военные выступили с инициативой создать новые средства использующие другие виды излучений, главным образом электромагнитные волны. Инициаторами исследований были представитель Главного артиллерийского управления (ГАУ) РККА М. М. Лобанов, впоследствии генерал-лейтенант, и представитель управления ПВО РККА П. К. Ощепков, впоследствии профессор, директор Института интроскопии. В Центральной радиолаборатории (ЦРЛ) организовалась группа под руководством старшего инженера Ю. К. Коровина. Договор между ЦРЛ и ГАУ был заключен в октябре 1933 года. Кстати, этот договор был первым в СССР юридическим документом, положившим начало планомерным научно-исследовательским и опытно-конструкторским работам в области радиолокации, а также их финансированию. В Соединенных Штагах по настоянию вице-адмирала Боуэна лишь в 1935 году конгресс ассигновал Морской исследовательской лаборатории 100 000 долларов специально на работы в области радиолокации. А первый контракт с промышленностью на постройку шести опытных станций был заключен в 1939 году.
Официальная западная история родиной радара считает Великобританию. Сейчас трудно винить историков за эту неточность, ведь все работы по радиолокации и у нас, и за рубежом по понятным причинам проводились в обстановке строжайшей секретности. Перед второй мировой войной Великобритания располагала самым большим в Европе военно-морским флотом, но Германия имела подавляющее превосходство в воздухе. Поэтому защита от воздушного нападения (немцы неоднократно бомбили Лондон) была для англичан жизненно важной задачей. С 1936 года вдоль побережья Великобритании стали строить линию постов раннего радиолокационного обнаружения, к началу войны она была закончена.
Идея радиолокации в те годы буквально носилась в воздухе. Впервые ее высказал П. К. Ощепков еще в 1932 году. Позднее он же предложил идею импульсного излучения. Любопытно, что спустя два года в Ленинградский электрофизический институт (ЛЭФИ) как-то пришел командир зенитной батареи с предложением использовать для обнаружения самолетов радиоволны. Он не знал, что подобные работы уже ведутся.
16 января 1934 года в Ленинградском физико-техническом институте (ЛФТИ) под председательством академика А.Ф. Иоффе состоялось совещание, на котором представители ПВО РККА, в числе которых был и П. К. Ощепков, поставили задачу обнаружения самолетов на высотах до 10 и дальности до 50 км в любое время суток и в любых погодных условиях. В протоколе совещания, в частности, говорилось: «При этом должны быть разработаны относительно достаточно мощные генераторы дециметровых и сантиметровых волн, направляющие электромагнитные излучения системы, а также приемные устройства, обеспечивающие по отраженному электромагнитному лучу определение местонахождения самолетов (их координаты), их количества, курс движения и скорости». Согласитесь, что задачи радиолокации были сформулированы предельно точно, но техники еще не было. За работу взялись несколько групп изобретателей и ученых. В ЛЭФИ группа энтузиастов (Б. К. Шембель, В. В. Цимбалин и др.) использовала метод непрерывного излучения радиоволн. Приемник и передатчик располагались раздельно. К приемнику поступали два сигнала: одни непосредственно от передатчика, а другой — отраженный от самолета. Поскольку дальность до самолета все время изменялась, набегала и фаза отраженной волны. Она то складывалась, то вычиталась с волной, приходящей непосредственно от передатчика. Возникала интерференция волн, вызывающая характерные биения, слышимые в телефонных наушниках, присоединенных к выходу приемника. Первые опыты проводились в Ленинграде, а уже летом 1934 года опытную установку показывали в Москве членам правительства. Передатчик был установлен на верхнем этаже дома № 14 по Красноказарменной улице, а приемник располагался в районе пос. Новогиреево по шоссе Энтузиастов, сразу же за Измайловским парком. На лесную поляну приехали маршал М.Н. Тухачевский, Н. Н. Нагорный, впоследствии командующий ПВО страны, академик М. В. Шулейкин и другие. Аппаратуру показывал энтузиаст радиолокации представитель УПВО П. К. Ощепков. Самолет, специально летавший в районе расположения аппаратуры, обнаруживался уверенно. Эта аппаратура работала на метровых волнах с использованием дипольных антенн. Диаграммы направленности их были широкими, и координаты самолета определялись лишь весьма приблизительно.
Неясных вопросов было очень много. Никто не знал, как отражаются радиоволны. Ведь до той поры имелись сведения лишь о «затенении» радиотрассы, обнаруженном еще А. С. Поповым: когда между двумя кораблями, осуществлявшими радиосвязь, проходил третий, связь нарушалась. Было известно об опытах американцев А. Тейлора и Л. Юнга, наблюдавших отражения радиоволн. И это все. Поэтому неудивительно встретить в отчете ЦРЛ, например, такие строки: «Отражающее зеркало не из металла, а из фанеры дает отражение примерно в четыре-пять раз меньше, чем металлические». Исследовали разные конструкции антенн, генераторных ламп, разные схемы приема, зависимость отражения от положения и типа самолета, от его высоты. Нелегким трудом добывались знания и опыт. Случались и неожиданные открытия.
В 1936 году в Евпатории группа Б. К. Шембеля испытывала новый радиопеленгатор «Буря». Он работал уже на дециметровых волнах длиной 21…23 см. Передатчик непрерывного излучения был выполнен на совершенно новом по тому времени электровакуумном приборе — магнетроне. Две параболические антенны (одна для передачи, другая для приема) устанавливались на поворотном устройстве снятого с вооружения звукоулавливателя. Вся аппаратура вместе с батареями и аккумуляторами размешалась на автомобильном прицепе. Пеленгатор успешно обнаруживал самолеты на расстоянии около 10 км. При этом в телефонах был слышен достаточно низкий звук биений, соответствующий доплеровской частоте. Но вот операторы отметили своеобразный свистящий звук, напоминающий щебетание ласточки. Звук появлялся только при ориентации антенны на юго-восток, где никаких видимых целей не было. Кроме того, звук появлялся при вибрации установки, хотя бы небольшой. Оказалось, что вибрация элементов генератора приводила к небольшой частотной модуляции его колебаний. Частотно-модулированные колебания, отраженные от неподвижного объекта, создавали биения в приемнике. Но что могло отражать радиоволны? Частота биений была так высока, что отражение было возможно лишь от очень удаленного объекта. Взгляд на карту прояснил дело. Радиоволны отражались от горных вершин Ай-Петри и Роман-Кош, возвышавшихся над горизонтом и видимых только в исключительно хорошую погоду. Расстояние до вершин было около 100 км. Так, хотя и случайно, РЛС непрерывного излучения с частотной модуляцией впервые осуществила локацию очень удаленных неподвижных объектов.
Особый успех выпал на долю группы, разрабатывавшей в ЛФТИ макет импульсного радиолокатора. В 1938 году макет был испытан и показал дальность действия до 50 км по самолету, летевшему на высоте 1,5 км. Создатели макета Ю. Б. Кобзарев, П. А. Погорелко и Н. Я. Чернецов в 1941 году за разработку радиолокационной техники были удостоены Государственной премии СССР.
Юрий Борисович Кобзарев, ныне академик, рассказывает: «Редуты» станции нового типа для обнаружения самолетов — были построены на принципе импульсного излучения радиоволн. До этого в подобных установках использовалось непрерывное излучение. Применяя же импульсный метод, мы рассчитывали, что удастся обнаруживать самолеты на больших расстояниях. В основу «редутов» легли работы, проводившиеся в Опытном секторе ПВО под руководством П. К. Ощепкова и в организованной в 1935 году Д. А. Рожанским лаборатории ЛФТИ».
Передатчик радиолокатора был собран на лампе ИГ-8, специально разработанной для этой цели В. В. Цимбалиным. Он имел мощность 40…50 кВт в импульсе при анодном напряжении около 20 кВ и работал на метровых волнах. Размещался передатчик в автофургоне, а на крыше фургона возвышалась антенна типа «Уда-Яги» с пятью директорами и тремя рефлекторами, укрепленными на мачте высотой 12 м. В другом автофургоне размешался приемник с точно такой же антенной.
Название антенны требует небольших пояснений. Она была изобретена японским профессором Хидетсугу Яги и описана его коллегой, профессором Уда, в специализированном японском журнале в марте 1926 года. В то время специалисты всего мира читали японские технические журналы, написанные иероглифами, не чаще, чем мы с вами, и названная публикация прошла незамеченной.
Профессор Уда повторил публикацию спустя два года, но уже на английском языке и в американском журнале. Антенна сразу получила признание и стала широко использоваться благодаря простоте конструкции и высокой эффективности. Все ее элементы размещены на несущей траверсе. Кроме обычного полуволнового диполя, соединенного с фидером, она содержит пассивные вибраторы-рефлекторы, находящиеся позади активного вибратора-диполя, и директоры, направляющие излучение вперед. Теперь антенны этого типа называют «волновой канал», они широко используются для приема телевидения, и их можно увидеть на крыше почти каждого дома.
Третий автофургон содержал агрегаты питания всей станции, получившей название «Редут». После всесторонних испытаний и усовершенствований станция «Редут» была принята летом 1940 года на вооружение войск ПВО под названием РУС-2. Небезынтересна история этого названия. Расшифровывается оно так: «Радиоуловитель самолетов», а предложил его нарком обороны К. Е. Ворошилов, когда познакомился с первыми макетами станций непрерывного излучения.
Станции РУС-2 сослужили хорошую службу с самого начала Великой Отечественной войны. Они своевременно помогли обнаружить армаду немецких самолетов (до 250 единиц), направлявшихся поздним вечером 21 июля 1941 года бомбить Москву. Сквозь заслон заградительного огня зенитной артиллерии к Москве прорвалось лишь несколько бомбардировщиков. Станции вели непрерывную воздушную разведку в осажденных Ленинграде и Севастополе, в Мурманске и на других важных участках фронта. Там, где использовались РЛС, отменялись дежурные вылеты истребителей — они поднимались в воздух лишь при появлении вражеских самолетов.
Станции РУС-2 непрерывно совершенствовались. Уже в конце 1941 года была решена проблема защиты приемника от мощных импульсов собственного передатчика и станция стала выпускаться в одноантенном варианте. По сравнению с аналогичными станциями, разработанными в США, Великобритании и Германии, наша станция весила почти в три раза меньше и в шесть раз быстрее разворачивалась из походного состояния в рабочее.
В течение всей войны велась очень интенсивная работа по увеличению дальности действия и точности определения координат с помощью РЛС. Станция РУС-2 и подобные не могли обеспечить высокую точность определения координат, поскольку работали на достаточно длинных волнах (4 м) и имели широкую диаграмму направленности антенн. Для ее сужения необходимо было перейти на более короткие волны, ведь угловая ширина ? главного лепестка диаграммы направленности определяется отношением длины волны к размеру антенны: ? = ?/D. И сверхвысокочастотная техника быстро развивалась: разрабатывались магнетронные генераторы, волноводная техника, более совершенные и чувствительные супергетеродинные приемники. Во время войны появились станции орудийной наводки (СОН) с параболическими зеркальными антеннами. А в конце 1942 года РЛС удалось поставить на двухместный самолет Пе-2. Впоследствии эти станции назывались ПНБ (прицел наведения бомбардировщика).
Как развивалась радиолокация у наших союзников? Англичане к 1941 году не только имели сеть РЛС вдоль юго-восточного побережья, но и устанавливали радиолокаторы на кораблях. 27 мая 1941 года после семидневной «охоты» англичане потопили лучший корабль германского флота линкор «Бисмарк» водоизмещением 35000 тонн. В преследовании линкора принимали участие авианосец, несколько линейных кораблей, крейсеров и эскадренных миноносцев. Наведение английской эскадры осуществлялось по данным РЛС.
Нет никакого сомнения, что, не будь у англичан радара, немецкому линкору удалось бы скрыться в условиях плохой погоды и бурного моря. Потопление «Бисмарка» нс обошлось для Англии без потерь. Погиб самый крупный и быстроходный в эскадре линейный крейсер «Худ». Он раскололся надвое после пятого залпа орудий главного калибра «Бисмарка», серьезное повреждение получил крейсер «Принц Уэльский».
Любопытно, насколько усовершенствовалась морская радиолокация за последующие два года. 26 декабря 1943 года другой немецкий линкор «Шарнхорст» дерзко напал в Баренцевом море на конвой судов, следовавших в Советский Союз. Несколько юго-западнее конвоя находилась эскадра главнокомандующего английским флотом адмирала Фрэзера. Он заранее вышел на перехват, получив сведения разведки, что «Шарнхорст» покинул свою базу в Альтен-фьорде в Норвегии. РЛС крейсера сопровождения «Белфаст» обнаружила фашистского пирата на расстоянии 17,5 миль, что дало возможность конвою судов приготовиться к отражению нападения. Завязался бой. Исход его решила подоспевшая эскадра адмирала Фрэзера.
Вот как описывает это М. М. Лобанов в книге «Из прошлого радиолокации»: «В полной темноте флагманский линкор Фрэзера «Герцог Йоркский» с помощью РЛС обнаружил «Шарнхорст» на дистанции около 23 миль. Приблизившись до 6 миль, он открыл по нему артиллерийский огонь. В условиях полярной ночи стрельба велась по данным РЛС. Затем английские эсминцы и крейсера атаковали и торпедировали «Шарнхорст». Торпедирование корабля было для него смертельно, и около 21 часа 30 минут он затонул. Из всего экипажа было спасено только несколько человек».
Итак, в 1943 году РЛС позволяли уже вести прицельный артиллерийский огонь. А к концу войны точность радаров возросла настолько, что были случаи радиолокационного обнаружения перископов подводных лодок.
Интенсивное развитие радиолокационной техники в Соединенных Штатах Америки началось с трагедии. В 1941 году американский флот на Тихом океане базировался в Перл Харборе (Жемчужная Гавань). Это военно-морская база, расположенная вблизи Гонолулу, на острове Оаху, входящем в архипелаг Гавайских островов, благодаря военной мощи и числу боевых кораблей считалась неприступной твердыней. Соединенные Штаты Америки пока еще не вступили во вторую мировую войну.
В глубокой тайне, прикрываясь лицемерными улыбками и лживыми дипломатическими переговорами, японские милитаристы разрабатывали план операции, позволявшей им одним ударом покончить с американским флотом и добиться господства на Тихом океане. В потаенную гавань на острове Итуруп (Курильские острова) стягивалась эскадра. Командующий японским флотом И. Ямамого строжайше запретил всякие радиопереговоры в эфире. Более того, радиопередачи каждого ушедшего из Японии корабля имитировались береговыми радиостанциями, чтобы ни один радист ничего не заподозрил. В ночь на 26 ноября 1941 года адмирал Нагумо вывел эскадру, держась далеко от обычных судоходных путей. Ночью 7 декабря она оказалась к северу or Гавайских островов. В состав эскадры входило шесть авианосцев с 360 самолетами, два линкора, три крейсера, девять эсминцев и шесть подводных лодок. Гавайские острова были наводнены японскими шпионами, дислокация американских кораблей и система обороны военно-морской базы были хорошо известны. Этой роковой ночью Нагумо получил последние донесения: никаких следов тревоги у американцев не наблюдалось. Радиостанция Гонолулу с утра передавала веселую музыку и послужила отличным приводным радиомаяком для японских самолетов. На рассвете 7 декабря 1941 года с палуб японских авианосцев поднялись 360 бомбардировщиков с полным запасом бомб и двумя группами легли на курс к острову Оаху.
На острове имелась единственная РЛС дальнего обнаружения SCR-270, развернутая на северном побережье. Удивительна беспечность американцев! Станция работала не круглосуточно, а включалась лишь с четырех до семи часов. Более того, техника была совершенно новой и ее никто не принимал всерьез. Надо сказать, что и в советских частях ПВО некоторые на первых порах к данным РЛС относились с недоверием, но, убедившись на деле в их полезности, очень быстро изменили свое мнение. Американцы переменили его за одно утро…
В 7 часов утра РЛС на острове Оаху не выключили просто потому, что еще не пришла машина за дежурными сержантом и солдатом. В 7 часов 02 минуты на экране радара появилась отметка цели, находящейся на расстоянии около 140 миль. По характеру отражения можно было заключить, что обнаружена группа самолетов. Дальнейшее трудно объяснить с позиций здравого смысла. Операторы некоторое время раздумывали, а надо ли им вообще докладывать об обнаруженной цели, ведь их дежурство уже закончилось. Потом все-таки позвонили в информационный центр. Дежурный офицер посоветовал: «Не обращайте внимания, это свои!». В то утро действительно ждали 12 бомбардировщиков Б-17 из Сан-Франциско. Они вылетели накануне, демонтировав часть вооружения и установив дополнительные топливные баки.
В 7 часов 55 минут над Перл-Харбором появились японские самолеты. Хотя обнаружены они были почти за час до этого, никаких мер принято не было. Как на учениях, при ясном небе и отличной видимости, японцы сбрасывали бомбы и торпеды на неподвижно стоящие корабли. Американские истребители взлететь уже не могли — взлетные полосы были разрушены. Корабли взрывались и тонули тут же, в гавани. Море огня и дыма, полная сумятица и полная неразбериха. Прилетевшие Б-17 только усилили хаос. Зенитчики не знали, в кого стрелять, а пилоты — куда садиться. Многие из прилетевших самолетов погибли при посадке или были сбиты японцами. Налет продолжался около двух часов. Отдельные проявления мужества и героизма опомнившихся американских летчиков, моряков и зенитчиков уже ничего не могли изменить. Военно-морские силы США потеряли четыре линкора, крейсер, три эсминца. Еще больше кораблей было повреждено. 260 уничтоженных самолетов, 5000 убитых и раненых — таков результат самонадеянности и халатности. Японцы потеряли 29 самолетов и 55 летчиков.
В тот же день президент США Ф. Рузвельт, выступая перед конгрессом, потребовал объявления войны Японии.
Промышленность США и Канады очень быстро наладила выпуск радиолокационных станций. Часть их по ленд-лизу поставлялась в СССР. Необходимость освоения все более коротких волн стимулировала и теоретические разработки. Это были годы рождения электродинамики сверхвысоких частот и волноводной техники.
Отгремела война, и перед радиолокационной техникой открылись новые сферы применения во многих отраслях народного хозяйства. Без радаров теперь немыслимы авиация и судовождение. Радиолокационные станции исследуют планеты Солнечной системы и поверхность нашей Земли, определяют параметры орбит спутников и обнаруживают скопления грозовых облаков. Техника радиолокации за последние годы неузнаваемо изменилась.
Радиолокационная техника
Рассмотрим структурные схемы простейших радиолокаторов. Доплеровская PЛC непрерывного излучения самая простая из всех. Именно такими и были первые «радиоуловители» самолетов. Она содержит генератор высокочастотных колебаний (ГВЧ), передающую Апер и приемную Апр антенны, смеситель и усилитель низкой частоты биений (УНЧ). На его выходе включаются либо наушники, либо частотомер. Доплеровская РЛС не обнаруживает неподвижные предметы. Сигнал, отраженный от них, имеет ту же самую частоту, что и излучаемый. Но если обнаруживаемый объект движется в направлении локатора или от него, частота отраженного сигнала изменяется вследствие эффекта Доплера.
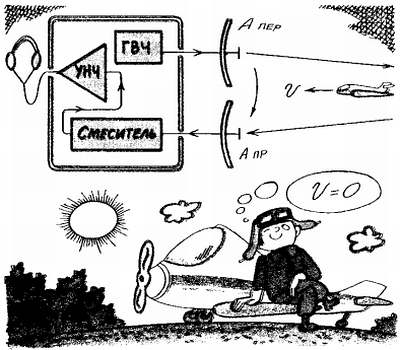
Структурная схема доплеровской РЛС непрерывного излучения.
С этим эффектом вы наверняка неоднократно встречались. Если на лодке в ветреную погоду двигаться навстречу волне, то удары волн о лодку становятся чаще. Если же вы меняете курс и уходите под ветер, то лодка как бы убегает от волны и удары волн становятся реже. В этих опытах в зависимости от направления движения и скорости лодки изменяется частота воспринимаемых нами колебаний водной поверхности — волн. Тот же эффект наблюдается и со звуковыми волнами. Тон гудка мчащегося на вас поезда кажется более высоким, а удаляющегося — более низким. При радиолокации эффект Доплера проявляется вдвое сильнее. Самолет, летящий навстречу излучаемой локатором волне, встречает более частые колебания электромагнитного поля. Переизлучая их во время движения, он еще повышает их частоту. При удалении же самолета от локатора частота отраженного сигнала понижается. В приемную антенну попадают два сигнала: прямою прохождения, просочившийся между антеннами, и отраженный от цели. В смесителе они взаимодействуют, образуя разностную частоту биений, в точности равную доплеровской fл = fo·(2v/c), fo — частота излучаемого сигнала; с — радиальная скорость цели; v — скорость радиоволн, равная скорости света.
Оценим, например, какова доплеровская частота для автомашины, скорость которой определяется инспектором ГАИ с помощью только что описанного устройства. Частота fo в этих локаторах лежит в диапазоне 10 ГГц, что соответствует длине волны 3 см, а скорость автомашины положим равной 30 м/с. Попутно заметим, что здесь имеет место явное нарушение правил движения, поскольку максимальная скорость на автодорогах установлена равной 90 км/ч, а 30 м/с соответствует 108 км/ч:

В этом случае на выходе локатора получается хорошо слышимый тон звуковой частоты. С помощью частотомера, установленного на выходе усилителя биений, можно достаточно точно определять радиальную скорость цели. Доплеровский метод измерения скорости используют и в самых современных радарах. Частотомер в этом случае вырабатывает цифровой код, который с помощью формирователя буквенно-цифровой информации выводится на основной экран РЛС. Рядом с отметкой цели оператор РЛС видит и цифру, соответствующую се скорости, выраженной в узлах, километрах в час или метрах в секунду.
Определить дальность доплеровским локатором нельзя, но если частоту излучаемых колебаний изменять в некоторых пределах, т. е. ввести в генератор частотную модуляцию, то появляется возможность измерить дальность. Именно так и случилось в первом опыте Б. К. Шембеля при локации Крымских гор. Пусть частота передатчика изменяется по пилообразному закону. Частота отраженного сигнала также будет изменяться, но с запаздыванием на время ? распространения волн до цели и обратно. Если частота передатчика в какой-то момент t1, равна f1, то отраженный сигнал возвращается с этой же частотой. Но частота передатчика к времени t1 + ? успеет измениться до значения f1 + ?f, и в приемнике выделится сигнал биений с частотой ?f. Она тем выше, чем больше расстояние до цели.
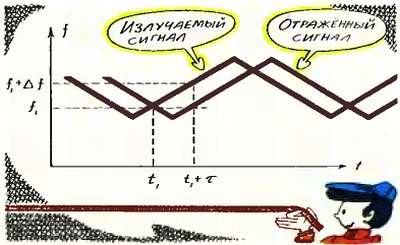
Закон изменения частоты сигналов в ЧМ локаторе.
Частотно-модулированные локаторы создавались неоднократно для работы с одиночными целями. Например, на самолетах Гражданской авиации многие годы применялся радиовысотомер РВ-2, построенный именно на этом принципе. Частотно-модулированные локаторы разрабатывались и для выполнения операции стыковки космических кораблей на орбите, причем они обеспечивали очень хорошую точность определения дистанции.
Наибольшее распространение получил импульсный способ определения дальности. На рисунке показана структурная схема импульсного локатора.
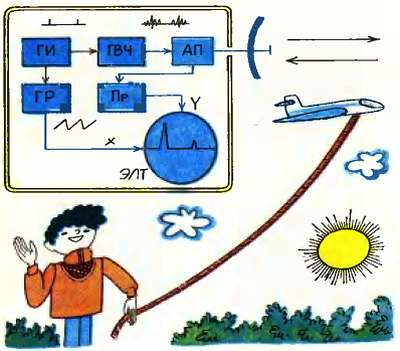
Структурная схема импульсной РЛС.
Его работой управляет генератор импульсов (ГИ), следующих с относительно невысокой частотой повторения порядка сотен импульсов в секунду. Мощные импульсы подаются на генератор высокой частоты (ГВЧ), вырабатывающий очень мощные короткие импульсы высокочастотных (ВЧ) колебаний. Например, если мощность ВЧ колебаний составляет 100 кВт, а длительность импульса 1 мкс, при частоте повторения 100 Гц средняя мощность ГВЧ составит всего 10 Вт, т. е. меньше, чем мощность обычной настольной лампы. Поэтому даже мощный импульсный генератор оказывается достаточно компактным и не перегревается при длительной работе. Через антенный переключатель (AП) ВЧ импульс поступает в антенну и излучается. После излучения импульса антенна подключается ко входу приемника (Пр). Разумеется, механический переключатель антенны непригоден: он не может обладать необходимым быстродействием. В первых одноантенных импульсных РЛС использовались газовые разрядники, по конструкции напоминавшие неоновую лампу, только они были рассчитаны на более высокую мощность. Установленный на входе приемника разрядник вспыхивал под действием мощного излучаемого импульса и замыкал вход приемника, «спасая» его от излишней ВЧ энергии. После излучения импульса разрядник погасал и не мешал отраженным сигналам поступать в приемник. В современных РЛС кроме газовых разрядников используют и полупроводниковые переключатели, выполненные на диодах.
Одновременно с излучением импульса запускается генератор развертки (ГР), вырабатывающий линейно нарастающее пилообразное напряжение. Оно поступает на пластины горизонтального отклонения электронно-лучевой трубки, экран которой и является широко известным по фильмам и книгам экраном РЛС. В результате луч перемещается слева направо, формируя линию развертки. Усиленный и продетектированный сигнал с выхода приемника подается на пластины вертикального отклонения. Что же мы видим на экране? Прежде всего в самом начале линии развертки появится мощный импульс, все-таки «просочившийся» в приемник через разрядники антенного переключателя. Он будет служить началом шкалы дальности. Спустя некоторое время, нужное для распространения волн, придут сигналы от целей. Луч к этому времени переместится правее. Чем дальше цель, тем дальше от начала развертки окажутся отраженные импульсы. А их амплитуда будет соответствовать интенсивности отраженного сигнала. По ней в какой-то мере можно судить о величине цели.
Определять дальность на экране импульсного локатора очень просто: под линией развертки можно расположить бумажную шкалу. В первых РЛС так и делали. Но, поскольку такой способ уж очень несерьезен, в схему локатора ввели масштабные генераторы меток. Шкалу дальности стал рисовать электронный луч параллельно со своим основным назначением индикацией целей. Генератор развертки совершенствовался, например достигнут возможность «растянуть» по горизонтали любое место линии развертки, чтобы подробнее рассмотреть отраженные сигналы в заданном интервале дальностей. Всех усовершенствований и не перечислить, о них написаны целые тома учебников и руководств по радиолокационной технике.
У описанного индикатора (он получил название «индикатор типа А») есть существенный недостаток: он дает только дальность, а направление на цель надо определять по шкалам поворотного устройства антенны. Поэтому очень скоро предложили другой индикатор (типа В), используемый в РЛС кругового обзора.

Индикатор кругового обзора.
Из самого названия ясно, что антенна этой станции вращается вокруг вертикальной оси, «просматривая» все азимутальные направления от 0 до 360°. Структурная схема РЛС и порядок работы остаются прежними, но индикатор кругового обзора (ИКО) выполнен совсем по-другому. Пилообразное напряжение развертки подается на специальный кольцевой отклоняющий электрод, и линия развертки проходит по радиусу — от центра к краю экрана. Она поворачивается синхронно с антенной. Для поворота линии развертки на обычные отклоняющие пластины X и Y подают синусоидальные переменные напряжения в квадратуре, т. е. на одну пару пластин — косинусоидальное напряжение, а на другую — синусоидальное. Частоты этих напряжений равны частоте вращения антенны и составляют доли герца. Луч при этом описывал бы круги на экране, но, поскольку имеется еще напряжение радиальной развертки на кольцевом электроде, изменяющееся значительно быстрее с частотой повторения излучаемых импульсов, луч чертит линию развертки, вращающуюся вместе с вращением антенны.
Сигнал с выхода приемника подастся на управляющий электрод (сетку) ЭЛТ и заставляет луч увеличивать яркость при наличии отраженных импульсов. Таким образом, на экране ИКО луч «рисует» радиолокационную карту местности. Место расположения самой РЛС соответствует центру экрана. Локатор кругового обзора очень хорошо подходит для морской навигации, дальнего обнаружения воздушных целей, диспетчерского контроля в Аэропортах.
Теперь все чаще переходят к секторному обзору, при котором антенна «осматривает» не весь горизонт, а только нужную его часть. Большие наземные РЛС снабжают индикаторами нескольких типов: кругового обзора для обнаружения целей и контроля обстановки, типа А для точного определения дальности и т. д. Если, например, диаграмма направленности антенны может «качаться» еще и по углу места (для этого обычно не наклоняют всю антенну, достаточно «качать» ее облучатель), то применяют в дополнение к ИКО индикатор «дальность-высота». В нем луч развертывается по радиусу и «качается» в некотором секторе синхронно с антенной, а координаты выбраны прямоугольными. Такой индикатор наглядно покажет и высоту цели.
Необходимо сказать несколько слов о конструкции отдельных элементов разработанных радиолокационных станций. Мощный генератор высокой частоты для локаторов, работающих в диапазоне метровых волн, выполняется на электронных лампах, как правило триодах. Но колебательный контур, состоящий из катушки и конденсатора, уже не пригоден, поскольку катушка для частот в десятки и сотни магагерц должна быть маленькой, а это несовместимо с высокой мощностью колебаний. Поэтому катушка вырождается в отрезок двухпроводной линии, выполненной из толстых медных трубок. Линия настраивается передвижным короткозамыкающим мостиком. Симметричная линия лучше всего совмещается с двухтактным генератором, схема которого и показана на рисунке.
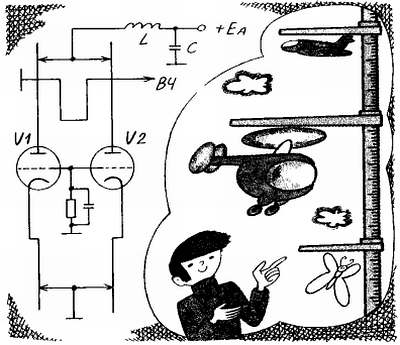
Триодный ВЧ генератор.
Конденсатора в контуре нет — его роль выполняют междуэлектродные емкости ламп. Через них осуществляется и обратная связь. Часть переменного анодного напряжения через емкость анод-катод возбуждает другой контур — линию, включенную между катодами ламп. Ее настройкой подбирают нужную для возбуждения колебаний фазу напряжения обратной связи. Сетки ламп заземляют по высокой частоте. Отбор мощности ВЧ колебаний осуществляют петлей связи, расположенной вблизи анодной линии. Напряжение анодного питания подают на короткозамыкающий мостик этой линии через ВЧ дроссель (катушку индуктивности), изолирующий источник питания от ВЧ колебаний.
Генератор будет работать в импульсном режиме, если его питать не постоянным анодным напряжением, а мощными высоковольтными импульсами. Они генерируются в устройстве с тиратроном — газоразрядной лампой, поджигаемой управляющим импульсом. Пока тиратрон погашен, накопительный конденсатор С заряжается через дроссель с большой индуктивностью L от высоковольтного источника. Ток заряда невелик, а время заряда может достичь периода повторения импульсов. Короткий запускающий импульс поджигает тиратрон, и генератор ВЧ оказывается подключенным к накопительному конденсатору, заряженному до высокого потенциала (десятки киловольт). Генерируется очень короткий радиоимпульс, причем анодный ток ВЧ генератора может достичь десятков ампер. Заряд конденсатора расходуется в течение нескольких микросекунд или даже долей микросекунды, генерация прекращается, и тиратрон гаснет. Конденсатор С снова начинает медленно заряжаться через дроссель L. Если бы ВЧ генератор заставили работать при такой мощности несколько дольше, то электроды лампы неминуемо расплавились бы, выгорели или испарились. Только благодаря краткости импульсов ничего этого не происходит, а средняя мощность генератора оказывается для него невысокой и вполне безопасной.
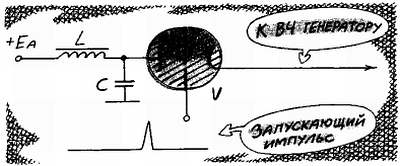
Импульсный генератор.
Импульсный модулятор с накопительным конденсатором имеет один существенный недостаток. По мере расходования заряда конденсатора при генерировании радиоимпульса напряжение на нем быстро падает, а с ним и мощность высокочастотных колебаний. В результате генерируется остроконечный радиоимпульс с пологим спадом. Гораздо выгоднее работать с прямоугольными импульсами, мощность которых в течение их длительности остается примерно постоянной. Прямоугольные импульсы будут генерироваться описанным генератором, если накопительный конденсатор заменить искусственной длинной линией, разомкнутой на свободном конце: например, может использоваться отрезок коаксиального кабеля. Волновое сопротивление линии должно равняться сопротивлению генератора ВЧ колебаний со стороны зажимов питания, т. е. отношению его анодного напряжения к анодному току. В момент поджигания тиратрона вдоль длинной линии побежит волна напряжения, разряжающая линию. Процесс закончится, когда волна напряжения, отразившись от разомкнутого конца линии, вернется к аноду тиратрона. Линия будет разряжена полностью, и тиратрон погаснет. Таким образом, длительность импульса определяется длиной линии и равна отношению удвоенной длины линии к скорости распространения волн в ней. Генераторы модулирующих импульсов с искусственными длинными линиями получили самое широкое распространение в радиолокационной технике.
Для перехода к дециметровым, а потом и к сантиметровым волнам ВЧ генератор с двухпроводными линиями оказался непригодным. Ведь длина линии составляет менее четверти длины волны, так какой же она должна быть на волне, скажем, 3 см? Кроме того, время пролета электронов в лампе оказывается больше периода колебаний, что полностью нарушает работоспособность триода. И здесь нашли выход. Длинные линии-контуры заменили объемными резонаторами. Что же это такое? Поясним на примере. Возьмем ВЧ контур, содержащий индуктивность в виде катушки всего из одного витка и небольшой конденсатор. Будем стараться повысить его резонансную частоту, не уменьшая размеров. Но как, разве это можно? Можно. Подключим вторую такую же катушку — виток параллельно первой. Общая индуктивность уменьшится, а частота возрастет. Подключим третью, четвертую и т. д., пока витки не образуют сплошную стенку вокруг конденсатора. Получился тороидальный объемный резонатор. Раздвинем пластины, чтобы уменьшить емкость и еще повысить частоту. Образовался цилиндрический объемный резонатор. Его размеры составляют от нескольких длин волн до половины длины волны, соответствующей резонансной частоте. Энергия подводится к объемному резонатору и выводится из него с помощью штыря, петли или отверстия связи.
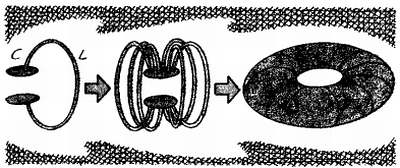
От колебательного контура к тороидальному объемному резонатору.
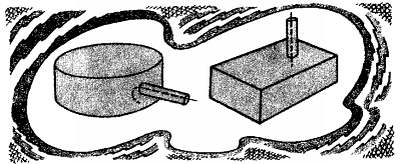
Цилиндрический и прямоугольный резонаторы.
Объемный резонатор не обязательно должен быть цилиндрическим, он может быть и прямоугольным. Если длину прямоугольного резонатора увеличивать до бесконечности, мы получим волновод — полую металлическую трубу прямоугольного сечения, в которой может распространяться высокочастотная энергия. На сантиметровых волнах двухпроводные фидерные линии сильно излучают, а коаксиальные вносят большие потери. Поэтому передача колебаний к антенне осуществляется только с помощью волноводов.
В волноводах и объемных резонаторах уже трудно говорить о токах или напряжениях. Там существуют электрическое Е и магнитное Н поля, т. е. те же поля, что в электромагнитной волне, распространяющейся в свободном пространстве. Таким образом, в волноводе (в соответствии с его названием) распространяется уже хорошо нам знакомая электромагнитная волна. На рисунке стрелками показаны направления электрического (сплошные линии) и магнитного (штриховые линии) полей.
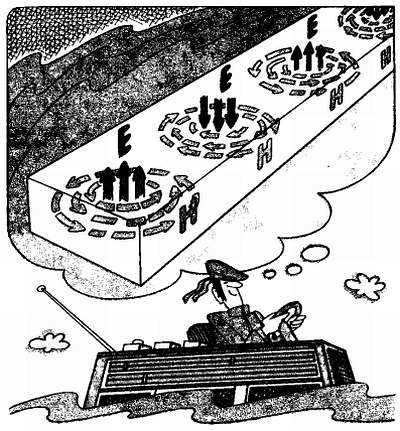
Волновод.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК