6.4.3. АППАРАТЫ УПРАВЛЕНИЯ, РЕГУЛИРОВАНИЯ И АВТОМАТИКИ
6.4.3. АППАРАТЫ УПРАВЛЕНИЯ, РЕГУЛИРОВАНИЯ И АВТОМАТИКИ
Автоматические электромагнитные выключатели (автоматы). Этот вид ЭА находит основное применение в системах распределения электроэнергии. Автоматы предназначены для включения и выключения цепей постоянного и переменного тока на напряжения до 1000 В и автоматической защиты цепей от коротких замыканий и токов перегрузки.
Широкое практическое применение автоматических выключателей началось в 20-х годах, когда электроэнергию стали интенсивно использовать в промышленном производстве. Первые отечественные автоматы начали разрабатывать в 1923 г. Б.Ф. Вашур, Д.А. Ступель и К.Н. Петров.
В 30-х годах была разработана серия отечественных универсальных автоматических выключателей типов А2000 — А2050 на токи от 200 до 1500 А.
Для защиты ртутных выпрямителей и генераторов постоянного тока А.И. Голубевым в 1936 г. была разработана оригинальная конструкция быстродействующего автомата типа ВАБ-2. В дальнейшем конструктивные решения А.И. Голубева были положены в основу серии быстродействующих выключателей, освоенной заводом «Уралэлектроаппарат». Основным направлением развития автоматов являлось совершенствование их защитных устройств, обеспечивающих срабатывание при заданных временных параметрах. В настоящее время в автоматах широко используются достижения современной электроники, в частности микропроцессорная техника.
Контакторы. Для автоматизации электропривода и управления распределением энергии по разным потребителям широко используются контакторы, которые являются одним из наиболее распространенных видов ЭА. Контакторы существенно отличаются от автоматов большим числом срабатываний за период эксплуатации, что обусловливает высокие требования к механической и электрической стойкости их контактной системы.
Первые контакторы начали выпускаться фирмами АЕГ и «Вестингауз» в начале XX века. Отечественная промышленность наладила серийный выпуск контакторов в 30-х годах (серии КП-900 и КТ). В послевоенный период на Чебоксарском электроаппаратном заводе были освоены серии КП-500 постоянного тока и КТП-500 переменного тока на токи от 50 до 100 А. Эти серии контакторов отличались высокими технико-экономическими характеристиками, в частности, их механическая износостойкость была доведена до 20 млн. включений за счет уменьшения вибраций контактов, сокращения времени горения дуги, улучшения магнитной системы и кинематики подвижных частей. Общий вид контактора серии КП-500 приведен на рис. 6.13.
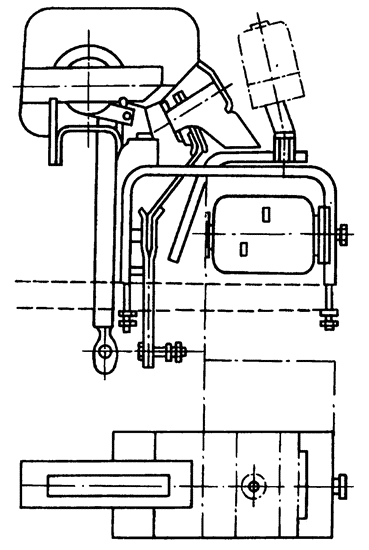
Рис. 6.13. Контактор типа КП-500 на ток 300 А
Совершенствование контакторов происходило в направлении уменьшения их габаритов, повышения быстродействия и увеличения срока службы. Для повышения электрической износостойкости контактов были проведены работы по ограничению дугообразования в контакторе.
Один из способов реализации этого направления связан с синхронизацией процессов перехода тока через нуль и началом размыкания контактов. Подобные работы для выключателей высокого напряжения проводились в 50-х годах Г.И. Атабековым и Г.В. Буткевичем.
Теоретические основы физических явлений, связанных с восстановлением электрической прочности между контактами, успешно развивались И.С. Таевым [6.52], который внес большой вклад в развитие отечественных контакторов.
Развитие силовой полупроводниковой техники создало новую возможность для реализации методов ограничения дугообразования за счет интеграции силовых диодов и тиристоров с электромеханическими контактами. Первые образцы подобных отечественных аппаратов были разработаны в 60-х годах Г.В. Могилевским, А.Г. Сосковым и другими специалистами. Такие аппараты позволили существенно ограничить процесс дугообразования и улучшить технико-экономические показатели контакторов. Поскольку такие контакторы объединяют электромеханические и силовые полупроводниковые ключи, они получили название гибридных контакторов.
В 80-х годах достижения в области силовых электронных приборов активизировали работы в области гибридных аппаратов. В результате рядом ведущих зарубежных фирм «Сименс», «Телемеханика» и «Мерлин Жерин» («Simens», «Telemecanique», «Merlin Gerin» и др.) создана широкая номенклатура высокоэффективных гибридных контакторов. Работы по их совершенствованию продолжаются.
Аппараты регулирования. Первые отечественные регуляторы напряжения были реостатного типа и воздействовали на цепь возбуждения генераторов первых в России электростанций. Реостатные регуляторы выпускались заводами «Электросила», «Динамо» с 1917 по 1928 г.
В 30-х годах в электротехнике получили широкое применение угольные регуляторы для генераторов и двигателей. Принцип действия таких регуляторов был основан на изменении сопротивления угольного столба, включенного в обмотку возбуждения, под воздействием давления, создаваемого электромагнитом.
В развитие теории автоматического регулирования большой вклад внесли русские ученые И.А. Вышнеградский, М.А. Ляпунов. В 30-х годах начинают развиваться частотные методы анализа в работах X. Найквиста (1932 г.), А.В. Михайлова (1938 г.) и других ученых. Особенно следует отметить работы в этой области акад. B.C. Кулебакина.
В этот же период стали применяться магнитные усилители (МУ). Принцип действия МУ основан на изменении индуктивности сопротивления дросселей насыщения при подмагничивании их магнитопроводов постоянным магнитным потоком, создаваемым обычно током управления.
В начале XX в. были созданы первые дроссели насыщения, управляемые путем подмагничивания постоянным током. Эти дроссели были усовершенствованы В.П. Вологдиным и Н.Д. Папалекси. Дальнейшее развитие теории магнитных усилителей связано с именами отечественных ученых Р.А. Липмана, Е.Л. Львова, И.Б. Негневицкого, М.А. Розенблата, Л.В. Шопена и др.
Большой вклад в создание общей теории магнитных цепей сделан В.И. Коваленковым. Методы расчета электромагнитных механизмов в разное время успешно разрабатывались отечественными учеными РЛ. Ароновым, А.Я. Буйловым, Б.К. Булем, Б.С. Сотсковым, Ф.А. Ступелем.
Магнитные усилители постоянно совершенствовались и успешно использовались для различных целей, особенно в системах автоматического регулирования. Но с конца 60-х годов создание мощных полупроводниковых приборов существенно ограничило их развитие. Однако в 80-е годы разработчики регуляторов вновь начали проявлять к ним интерес благодаря их стойкости к различным возмущающим воздействиям. Работы в этом направлении происходили на основе применения в цепях повышенной частоты, где возможности МУ проявляются наиболее ярко.
Принципиально новые возможности и перспектива для развития эффективных регуляторов различного назначения были созданы в результате совершенствования электронных технологий.
Создание в конце 80-х годов силовых полностью управляемых полупроводниковых приборов на токи свыше 1 кА и напряжение 1 кВ позволило создавать импульсные регуляторы большой мощности. При этом стало возможным высокое качество управления посредством микропроцессорных устройств.
На основе соединения в едином конструктивном модуле силовых электронных приборов и микроэлектронных устройств родились новые виды аппаратов, получивших название «интеллектуальных». Такие аппараты открыли новые перспективы развития в различных областях техники, в частности электропривода, светотехники и др.
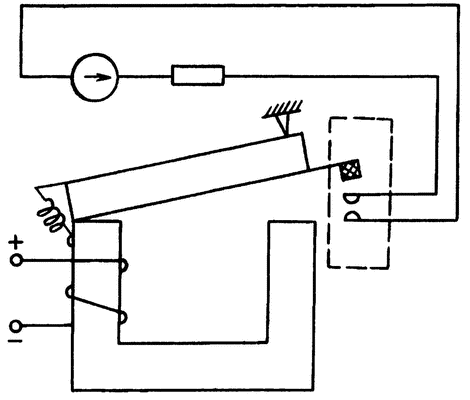
Рис. 6.14. Упрощенная схема электромагнитного реле якорного типа
В новый этап совершенствования отечественных электрических аппаратов управления на основе силовой электроники большой вклад внесли работы, проводимые с начала 90-х в МЭИ под руководством Ю.К. Розанова.
Реле. В классе ЭА автоматики и зашиты наиболее распространенным видом являются реле. Первые реле были созданы и нашли практическое применение в конце XIX в. Причем наиболее широкое применение первые реле находили в системах телефонной и телеграфной связи.
Первые реле имели конструкцию якорного типа, принцип действия которой основан на перемещении якоря с контактной системой при подаче напряжения или тока на обмотку электромагнита (рис. 6.14). Реле с таким типом конструкции получили широкое распространение и их усовершенствованные модификации продолжают использоваться в настоящее время.
В 30-х годах развитие электроэнергетики в промышленно развитых странах активизировало научно-исследовательские и опытно-конструкторские работы в области релейной защиты. В результате были созданы различные конструкции реле максимального тока, минимального напряжения, дифференциальные реле обратной мощности и много других типов реле защиты. В этот же период фирмой АЕГ была разработана конструкция индукционного реле (рис. 6.15), которая получила широкое применение во всем мире. На основе этой конструкции были созданы защитные реле с регулируемой выдержкой времени, зависящей от значения контролируемого тока.
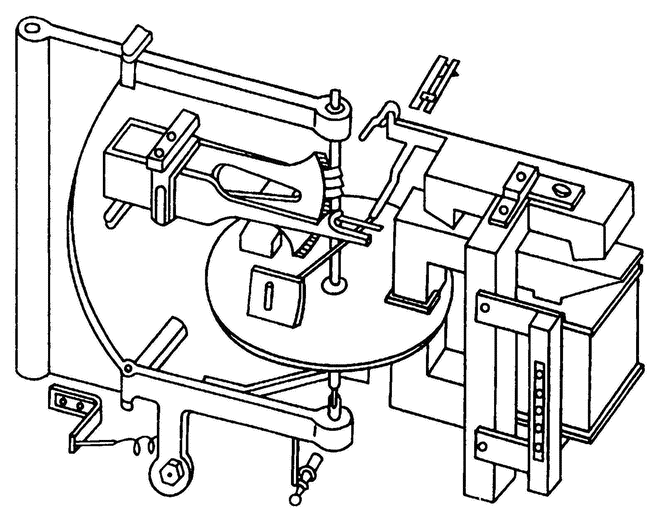
Рис. 6.15. Конструкция индукционного реле
Для систем автоматики требовались реле с высоким быстродействием, малым потреблением энергии для управления и большим числом срабатываний за период эксплуатации. Для этих целей конструкция якорного реле мало подходила. В результате работы над повышением быстродействия реле и упрощением его конструкции в 20-х годах В.И. Коваленков предложил отказаться от массивного якоря, заменив его легкими контактными сердечниками, выполненными в виде упругих консолей из ферромагнитного материала. Эта конструкция получила дальнейшее развитие в реле с герметичными контактами, названных герконами.
Конструкция герконов была запатентована в 1942 г. В. Элвудом (США). В этой конструкции контактные сердечники из ферромагнитного материала помещены в стеклянный герметичный баллон, заполненный инертным газом (рис. 6.16). Непосредственно контактирующие поверхности покрыты тонким слоем контактного материала, например серебра. Для управления контактами используется обмотка управления, создающая магнитный поток, или постоянные магниты. Герконы с 60-х годов начали успешно использовать в различных системах автоматики. Принцип герконового реле в дальнейшем получил развитие при создании сильноточных герметизированных контактов (герсиконов). Большой вклад в развитие методов анализа отечественных герконов внес В.Н. Шоффа (МЭИ).
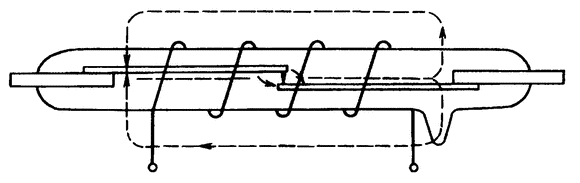
Рис. 6.16. Герметизированный управляемый контакт (геркон)
В 50-е годы, когда интенсивно проводились научно-исследовательские работы в области магнитных усилителей, последние успешно были использованы в качестве бесконтактных реле. Релейный эффект в этих устройствах достигался посредством введения положительных обратных связей.
Новый этап развития реле автоматики и защиты начался на основе достижений микроэлектронной техники. Использование электронных компонентов позволило существенно улучшить технико-экономические характеристики реле и расширить их функции. Так, например, большинство современных реле для систем защиты содержат микропроцессоры, определяющие алгоритм функционирования реле в зависимости от режимов работы и состояния контролируемой системы и ее составных частей. При этом информация в микропроцессоры может поступать как с различных датчиков, так и с блоков управления более высокого уровня.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Коммутационные аппараты
Коммутационные аппараты Вопрос. Как выбирается количество коммутационных аппаратов для электродвигателей?Каждый электродвигатель, как правило, оснащается отдельным коммутационным аппаратом. Для группы электродвигателей, служащих для привода одной машины или ряда
1. Основные понятия технического регулирования
1. Основные понятия технического регулирования Основным нормативным документом, дающим определение и толкование технического регулирования, является Закон «О техническом регулировании». Исходя из определения, данного в этом документе, техническое регулирование
2. Основные принципы технического регулирования
2. Основные принципы технического регулирования Закон РФ «О техническом регулировании» формулирует и основные принципы технического регулирования. К ним относятся следующие:1) принцип использования единых правил и установление требований к товарам, процессам их
4. Положения Государственной системы технического регулирования и стандартизации
4. Положения Государственной системы технического регулирования и стандартизации Свод правил и положений, содержащих порядок проведения работ по стандартизации РФ и касающихся фактически всех основных отраслей народного хозяйства страны, независимо от уровня
26. Основные понятия технического регулирования
26. Основные понятия технического регулирования Основным нормативным документом, дающим определение и толкование технического регулирования, является Закон «О техническом регулировании».В этом нормативном документе приводится перечень основных понятий, необходимых
27. Основные принципы технического регулирования
27. Основные принципы технического регулирования Закон РФ «О техническом регулировании» формулирует и основные принципы технического регулирования. К ним относятся следующие:1) принцип использования единых правил и установление требований к товарам, процессам их
29. Положения Государственной системы технического регулирования и стандартизации
29. Положения Государственной системы технического регулирования и стандартизации Свод правил и положений, содержащих порядок проведения работ по стандартизации РФ и касающихся фактически всех основных отраслей народного хозяйства страны, независимо от уровня
54. Проектирование систем контроля и автоматического регулирования
54. Проектирование систем контроля и автоматического регулирования Системы контроля и автоматического регулирования, конечным результатом которых являются сегодня орбитальные космические станции, межпланетные орбитальные станции, годами находящиеся на расстоянии
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ Работы по созданию автоматизированных систем управления технологическими процессами (АСУ ТП) электроэнергетических объектов были начаты с появлением
6.6.9. СИСТЕМЫ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
6.6.9. СИСТЕМЫ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ Транзисторы и многочисленные устройства на их основе позволили перейти к практической реализации ряда эффективных идей в области систем управления электропривода.Наиболее плодотворной оказалась идея, предложенная еще в
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1). Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 –