Звуковые и ультразвуковые системы
Звуковые и ультразвуковые системы
Звук может быть использован в играх, определении расстояний, предотвращении столкновений и объезде препятствий. Для игры в «салки» роботы снабжены двухтональным генератором и приемником. Каждый робот может генерировать и принимать сигналы двух тонов. Допустим, тон А составляет 3000 Гц, а тон В – 6000 Гц. Эти тоны издаются при любом столкновении роботов (используются контактные выключатели).
Робот, который является «салкой» (водящим), издает звук тона В при любом столкновении «бамперов» с другим роботом. Робот, который является «не водящим», в этом случае издает звук тона А. Напомним, что при столкновении «водящий» робот издает звук В. «Не водящий» робот слышит звук В, переключается и становится «водящим». В свою очередь «водящий» робот слышит звук А и становится «не водящим». При столкновении двух «неводящих» роботов каждый издает звук тона А, поэтому их состояние не меняется. Понятно, что мы использовали звуковые сигналы в качестве примера. С тем же успехом можно использовать системы коммуникации на ИК лучах.
Для определения расстояний и обнаружения препятствий часто используется ультразвук. Многие конструкторы остановились на использовании ультразвуковых модулей компании Polaroid (см. рис. 5.33). Подобные модули используются в фотокамерах Polaroid для быстрого определения расстояния до объекта и фокусировки объектива с целью получения четкого изображения. При соединении с интерфейсом микроконтроллера подобные устройства способны измерять расстояния с большой точностью.

Рис. 5.33. Ультразвуковой дальномер типа Polaroid
Такие датчики фирмы Polaroid очень удобны для использования в роботах с целью определения расстояний. Устройство способно измерять расстояния до 10 м. При использовании сервомотора или шагового двигателя устройство можно поворачивать на манер радара для составления навигационной карты или обнаружения свободного прохода.
При каждом включении УЗ преобразователь фирмы Polaroid издает слышимый щелчок. Эти постоянные щелчки, исходящие от датчика, кажутся мне раздражающими. Хотя модуль функционирует в ультразвуковом диапазоне, начальный процесс возбуждения УЗ излучателя сопровождается слышимыми звуками.
Относительно легко создать УЗ систему избегания столкновений, которая, будучи полостью ультразвуковой, работает «тихо». Основная схема повторяет схему избегания столкновений на ИК лучах, с тем отличием, что мы используем звук вместо света. На рис. 5.34 показана функциональная схема устройства. Передатчик посылает сигнал 40 кГц в УЗ преобразователь (излучатель). Другой преобразователь (приемник) расположен рядом с излучателем передатчика. Когда робот приближается к стене или препятствию, сигнал 40 кГц отражается и попадает в приемник, что вызывает повышение амплитуды его выходного напряжения. Когда напряжение превысит пороговое значение, компаратор перебросится в другое состояние, сигнализируя о наличии препятствия.
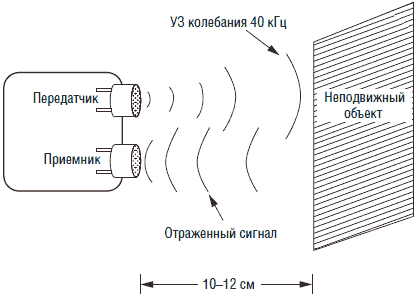
Рис. 5.34. Схема УЗ детектора препятствий
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Системы возбуждения
Системы возбуждения Вопрос. Что называется системой возбуждения?Ответ. Называется совокупность оборудования, аппаратов и устройств, объединенных соответствующими цепями, которая обеспечивает необходимое возбуждение автоматически регулируемым постоянным током
7.8. Две системы
7.8. Две системы Мы имеем перед собой две кибернетические системы. Первая система — человеческий мозг. Ее функционирование — индивидуальное человеческое мышление. Ее задача — координация действий отдельных частей организма в целях сохранения его существования. Эта
Подструктура системы
Подструктура системы Мы будем конструировать нашего робота на основе модели радиоуправляемого автомобиля. В идеальном случае модель должна иметь систему пропорционального управления ходом и поворотами автомобиля. В нашем прототипе используется именно такая модель
Глава 16 Звуковые сигналы
Глава 16 Звуковые сигналы Звуковые сигналы AWARD BIOS• Сигналов нет Неисправен блок питания, или он не подключен к материнской плате.• Непрерывный сигнал Неисправен блок питания. Замените его.• 1 короткий сигнал Ошибок не обнаружено. Этот сигнал можно слышать при каждой
Рабы Системы
Рабы Системы Памяти заключенных спецтюрьмы ЦКБ-29 НКВДПродолжение. Начало см. "Мир Авиации:" № 4, 1993 г.Наконец наступила стадия строительства деревянного макета двухмоторного бомбардировщика в натуральную величину. За отсутствием подходящего помещения пришлось это
4.3.2. Системы сертификации
4.3.2. Системы сертификации В соответствии с действующими положениями в промышленности и в Авиарегистре (последние обязательны для промышленности и гражданской авиации) система сертификации предусматривает постоянный (непрерывный) и поэтапный контроль соответствия
Рабы Системы
Рабы Системы Продолжение. Начало см. «Мир Авиации» № 4,1993 г., № 1, 1994 г.Памяти заключенных спецтюрьмы ЦКБ-29 НКВДМаксимилиан САУККЕ МоскваВетер перемен 1985 г. позволил слегка приоткрыть завесу секретности над истиной. Центральный архив КГБ разрешил знакомиться с делами
Рабы системы
Рабы системы Максимилиан САУККЕМоскваПамяти заключенных спецтюрьмы ЦКБ-29 НКВДЖурнальный вариант главы из рукописи "Неизвестный Туполев"Шла вторая половина 1937 г. Главный инженер ГУАП и руководитель ведущего ОКБ по самолетостроению Андрей Николаевич Туполев был полон
8.2.1. ЭЛЕКТРОЭНЕРГЕТИЧЕСКИЕ СИСТЕМЫ
8.2.1. ЭЛЕКТРОЭНЕРГЕТИЧЕСКИЕ СИСТЕМЫ Электроэнергетические системы (ЭЭС) современных гражданских судов и военных кораблей являются сложными комплексными системами, в которых нашли применение новейшие достижения практически во всех областях науки и техники
8.3.1. СИСТЕМЫ ЗАЖИГАНИЯ
8.3.1. СИСТЕМЫ ЗАЖИГАНИЯ Низковольтная магнитоэлектрическая машина, названная впоследствии «магнето низкого напряжения», была впервые применена для зажигания двигателей внутреннего сгорания (ДВС) в 1875 г. От магнето осуществлялось зажигание на отрыв — внутри цилиндра ДВС
8.3.2. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ
8.3.2. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ Тип системы электроснабжения в значительной мере зависит от наличия на подвижном объекте аккумуляторной батареи, т.е. в конечном итоге от наличия электростартерного пуска.Если электропуск отсутствует, то используется система
ЭВМ системы связи
ЭВМ системы связи В части секундных интервалов процесса связи с Центром пилотируемых полетов NASA ведется «разговор» с одним или двумя космическими кораблями одновременно. Скоростные ЭВМ на базах связи передают команды или принимают данные о давлении в кабине, команды
22. Система с неограниченной растворимостью в жидком и твердом состояниях; системы эвтектического, перитектического и монотектического типа. Системы с полиморфизмом компонентов и эвтектоидным превращением
22. Система с неограниченной растворимостью в жидком и твердом состояниях; системы эвтектического, перитектического и монотектического типа. Системы с полиморфизмом компонентов и эвтектоидным превращением Полная взаимная растворимость в твердом состоянии возможна
5.4 Проектирование системы
5.4 Проектирование системы Разработчик должен принимать участие в проектировании системы. Если систему разрабатывают для нескольких различных построений, то ее проект не может быть полностью определен до завершения всех построений. Разработчик должен идентифицировать