Устройство нечеткой логики – система слежения за направлением источника света
Устройство нечеткой логики – система слежения за направлением источника света
Сейчас мы приступим к изготовлению устройства – системы слежения за направлением источника света, использующего принцип нечеткой логики. Система отслеживает направление на источник света, применяя нечеткую логику.
Для конструкции системы слежения нам потребуются два CdS фотоэлемента, которые представляют собой светочувствительные резистивные датчики (см. рис. 6.29). Сопротивление такого элемента изменяется пропорционально интенсивности светового потока, падающего на чувствительную поверхность фотоэлемента. В условиях темноты элемент имеет наибольшее сопротивление.
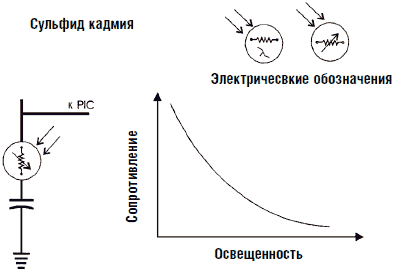
Рис. 6.29. Электрические характеристики CdS фотоэлемента
В продаже имеется много различных типов CdS фотоэлементов. Выбор подходящего элемента основывается на темновом сопротивлении элемента и сопротивлении светового насыщения. Термин «сопротивление светового насыщения» означает минимальное сопротивление элемента, которое перестает уменьшаться при повышении уровня освещенности, т. е. становится насыщенным. Я использую CdS фотоэлементы, имеющие темновое сопротивление порядка 100 кОм и сопротивление светового насыщения порядка 500 Ом. При средних условиях освещенности сопротивление варьирует в пределах 2,5-10 кОм.
Для проекта потребуется два CdS фотоэлемента. Необходимо проверить каждый элемент по отдельности, поскольку внутри элементов одного типа наблюдается разброс параметров, что потребует изменения коэффициента шкалирования. Для команды pot я использовал емкость 0,022 мкФ и параметр множителя шкалы 225.
Принципиальная схема устройства изображена на рис. 6.30. CdS фотоэлементы подключены к шине порта В (физические номера выводов 8 и 9).
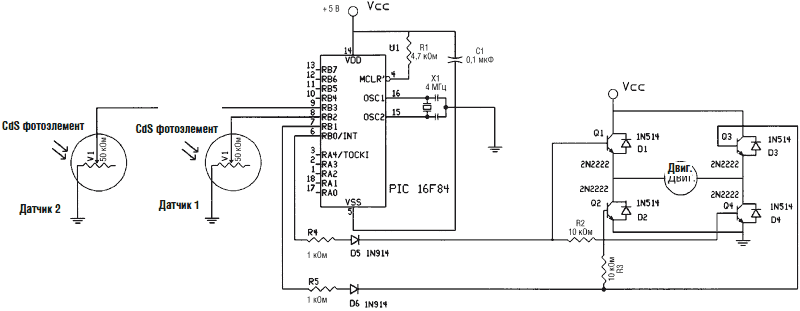
Рис. 6.30. Схема системы слежения за источником света
Фотоэлементы закреплены на небольшой пластине из пластика или дерева (см. рис. 6.31). Для выводов фотоэлементов в пластине просверлены небольшие отверстия. С обратной стороны к выводам подпаяны проводники, соединенные с выводами PIC микроконтроллера.
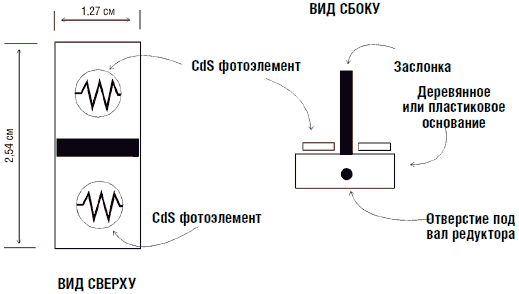
Рис. 6.31. Конструкция блока датчиков
Для закрепления вала редуктора двигателя просверлено отверстие от 2,4 мм до 3 мм. Вал редуктора пропущен через отверстие в блоке датчиков и закреплен клеем (см. рис. 6.32).
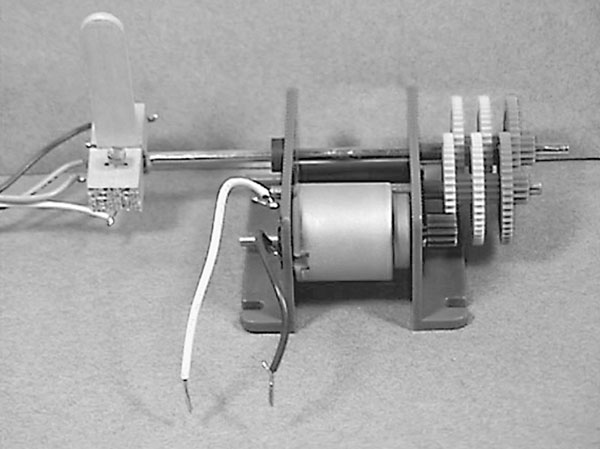
Рис. 6.32. Фотография блока датчиков, закрепленных на редукторе двигателя
Работа системы слежения показана на рис. 6.33. При одинаковом освещении обоих датчиков, их соответствующие сопротивления примерно одинаковы. В пределах ±10 единиц PIC программа считает их одинаковыми и не включает устройство поворота. Иными словами, образуется группа «одинаковости» с размахом 20 единиц. Подобная группа и есть группа нечеткой логики.
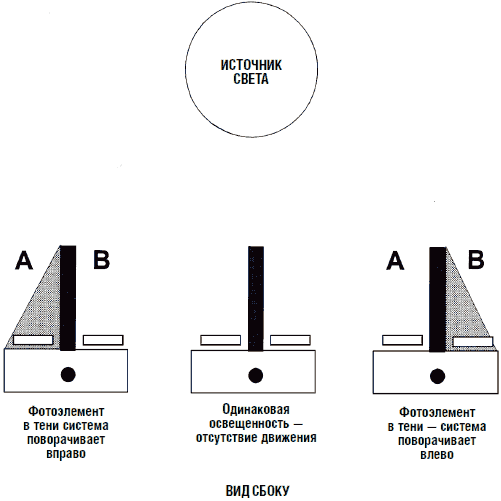
Рис. 6.33. Работа блока датчиков в зависимости от направления на источник света
Когда один из датчиков попадает в зону тени, т. е. разность показаний датчиков превышает диапазон 20 единиц, PIC микроконтроллер запускает двигатель, поворачивающий блок сенсоров в сторону источника света (т. е. равной освещенности датчиков).
Управление двигателем постоянного тока
Для поворота блока датчиков в сторону источника света устройство использует двигатель постоянного тока с редуктором (см. рис. 6.34). Коэффициент замедления редуктора 4000:1. Вал редуктора имеет скорость примерно 1 оборот в минуту. При повторении конструкции для поворота блока датчиков рекомендуется использовать двигатель с редуктором, имеющим подобные характеристики.
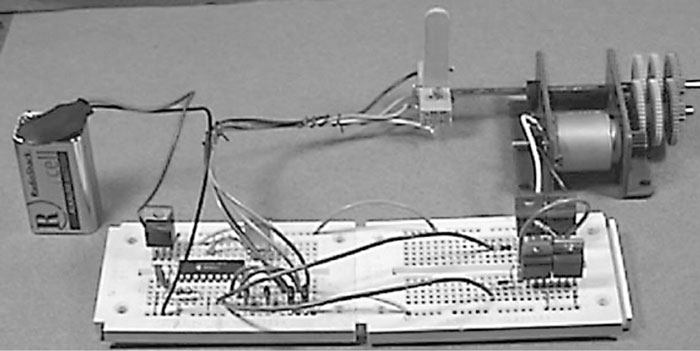
Рис. 6.34. Фотография конструкции устройства слежения в сборе
Блок датчиков прикреплен (приклеен) к валу редуктора двигателя. Двигатель через редуктор может поворачивать блок по часовой стрелке или против часовой стрелки в зависимости от направления тока, протекающего через двигатель.
Для обеспечения реверсирования направления вращения двигателя необходимо устройство, обеспечивающее протекание тока в обоих направлениях. Для этой цели мы используем мостовую схему. В мостовой схеме используются четыре транзистора (см. рис. 6.35). Рассмотрим каждый транзистор как простой ключ, как показано в верхней части рисунка. Схема названа мостовой, поскольку транзисторы (ключи) включены нее в виде моста.
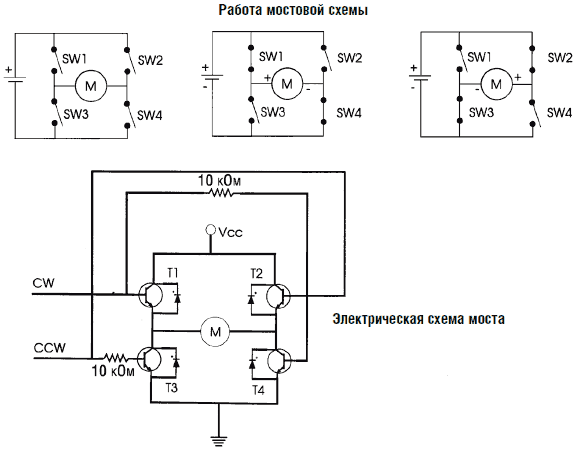
Рис. 6.35. Работа мостовой схемы и ее устройство
При замыкании ключей SW1 и SW4 двигатель вращается в одном направлении. При замыкании ключей SW2 и SW3 двигатель вращается в противоположном направлении. Если ключи разомкнуты, то происходит остановка двигателя.
Управление мостом осуществляется с помощью PIC микропроцессора. Мостовая схемы включает в себя четыре NPN транзистора типа 120 Darlington, четыре диода типа 1N514 и два резистора 10 кОм 0,25 Вт. Вывод 0 подключен к транзисторам Q1 и Q4. Вывод 1 подключен к транзисторам Q2 и Q3. Сигналами на выводах 0 и 1 открываются соответствующие транзисторы и двигатель вращается по или против часовой стрелки соответственно данным блока датчиков. Обратите внимание на правильность подключения резисторов 10 кОм, в противном случае схема не будет работать.
Транзисторы TIP 120 Darlington изображены на схеме как обычные NPN транзисторы. Во многих схемах моста в «верхней» части используются транзисторы PNP проводимости. Сопротивление PNP транзисторов немного выше. Таким образом, если мы используем только NPN транзисторы, то КПД устройства несколько увеличится.
Диоды
Для предотвращения выбросов напряжения, которые могут привести к сбросу или зависанию PIC микропроцессора, используются защитные диоды, включенные между эмиттером и коллектором каждого транзистора (от Q1 до Q4). Эти диоды гасят всплески напряжения, возникающие при включении и выключении обмоток двигателя.
Программа на PICBASIC имеет следующий вид:
‘Программа нечеткой логики для системы слежения
start:
low 0 ‘Низкий уровень шины 0
low 1 ‘Низкий уровень шины 1
pot 2,255,b0 ‘Чтения показаний фотоэлемента 1
pot 3,255,b1 ‘Чтение показаний фотоэлемента 2
if b0 = b1 then start ‘Если показания равны, то ничего не делать
if b0 > b1 then greater ‘Если больше, то насколько
if b0 < b1 then lesser ‘Если меньше, то насколько
greater: ‘Процедура больше
b2 = b0 – b1 ‘Определение разницы показаний
if b2 > 10 then cw ‘Внутри границ? Если нет, перейти на cw
goto start: ‘Если внутри границ, измерять снова
lesser: ‘Процедура меньше
b2 = b1 – b0 ‘Определение разницы показаний
if b2 > 10 then ccw ‘Внутри границ? Если нет, перейти на ccw
goto start: ‘Если внутри границ, измерять снова
cw: ‘Поворот блока по часовой стрелке
high 0 ‘Включить мост
pause 100 ‘Вращение 0,1 с
goto start ‘Новая проверка
сcw: ‘Поворот блока против часовой стрелки
high 1 ‘Включить мост
pause 100 ‘Вращение 0,1 с
goto start: ‘Новая проверка
Работа устройства
При работе система слежения поворачивается вслед за перемещением источника света. Если оба CdS фотоэлемента освещены примерно одинаково, то поворота не происходит. Для проверки работы устройства закройте пальцем один из CdS датчиков. Это должно вызвать включение двигателя и поворот вала редуктора.
Если вал вращается в направлении, противоположном заданному, то поменяйте либо входные проводники датчиков, либо выходные проводники управления мостовой схемой, но не обе операции одновременно.
Выход, не использующий нечеткую логику
Устройство системы слежения с нечеткой логикой имеет двоичный выход. Двигатель может находиться в трех состояниях: выключено и вращение по и против часовой стрелки. Во многих случаях требуется плавное (градуальное) изменение выходного сигнала. Допустим, вы проектируете устройство управления двигателем лифта. Необходимым условием в данном случае будет постепенное, а не резкое ускорение или остановка лифта (двигатель не должен просто включаться и выключаться).
Возможно ли подобное изменение схемы нашего устройства? Да, конечно. Вместо простого включения двигателя, мы можем запитывать его сигналом ШИМ, который управляет скоростью его вращения.
В идеале скорость вращения двигателя должна быть пропорциональна разнице показаний (сопротивлений) двух CdS датчиков. Большая разница будет приводить к большей скорости вращения. По мере вращения датчика и приближения его к положению равновесия скорость вращения двигателя будет динамически изменяться.
Такая программа управления выходом может быть иллюстрирована графиками, разбиениями на группы и принадлежностью к группе в терминах нечеткой логики. В данном случае использование подобной программы для системы слежения является избыточным.
В целях эксперимента вы можете использовать команды pulsout и pwm для управления скоростью вращения двигателя.
Нейронные датчики (логика)
При помощи простой программы мы можем превратить датчики нечеткой логики (CdS фотоэлементы) в нейронные датчики. Нейронные сети представляют собой обширную область, мы же ограничимся одним небольшим примером. Для тех, кто решил углубленно изучить строение нейронных сетей, я рекомендую собственную книгу Understanding Neural Networks (Prompt, Indianapolis, 1998, ISBN 0-7906-1115-5).
Для создания нейронного датчика мы возьмем численные значения каждого датчика, умножим их на соответствующие весовые коэффициенты и суммируем результирующие величины. Полученный результат затем будет сравниваться со значением трехуровневого порогового значения (см. рис. 6.36).
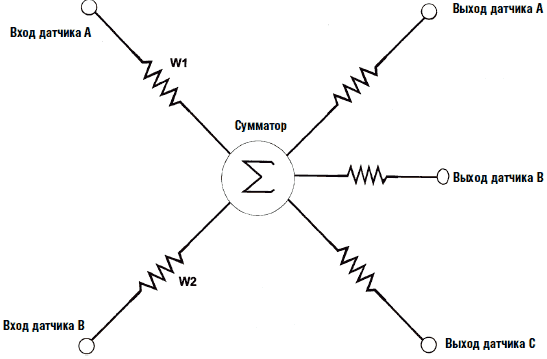
Рис. 6.36. Схема трехуровневого нейрона
Наша небольшая программа и датчики могут выполнять все функции, присущие нейронной сети. Более того, введение многоуровневых пороговых значений является нашей оригинальной разработкой. Существуют ли многопороговые системы в природе (биологические системы)? Да, несомненно. Зуд или чесотка представляет собой очень незначительную по уровню боль, а жжение может ощущаться как жары, так и от действия холода.
Многоуровневые пороговые значения
Как правило, отдельные нейроны нейронной сети имеют единственный порог (положительный или отрицательный). Если значение превышает пороговое, то нейрон активируется. В нашем случае выходной сигнал сравнивается с несколькими пороговыми значениями и попадает, таким образом, в соответствующую группу.
Вместо того чтобы рассматривать группы выхода как диапазоны численных значений, воспользуемся геометрической интерпретацией. Рассмотрим группы как группы круга, квадрата и треугольника соответственно. При накоплении значения «на нейроне» его выходом будет служить геометрическая форма, а не численное значение. Выходные нейроны (светодиоды) могут быть собраны в матрицы соответствующей формы. При попадании сигнала в определенную группу загорается соответствующая матрица.
В нашем случае каждый из уровней выхода нейрона мы будем относить к трем группам характерного «поведения»: спячке, охоте и кормлению, которые отражают основные типы поведения «выживания» для робота «охотника за светом». Выбор типа «поведения» основывается на текущем уровне освещенности. При низком уровне освещенности робот-охотник прекращает охоту и поиски пищи (света). Включается режим сна или спячки. При средних уровнях освещенности робот «охотится» и выискивает места с наибольшим уровнем света. При высоких уровнях освещенности «охотник» останавливается и «питается», подзаряжая солнечные батареи.
В этой главе мы не будем изготовлять полную модель робота-охотника, лишь ограничимся использованием светодиодов как индикаторов типа соответствующего поведения (см. рис. 6.37). Можно обозначить светодиоды как «спячка», «охота» и «питание». Каждый из светодиодов зажигается в зависимости от интенсивности светового потока, принимаемого CdS фотоэлементами.
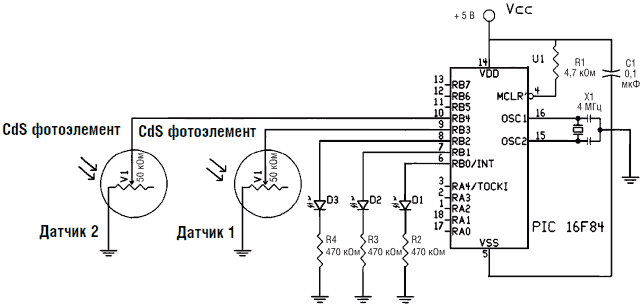
Рис. 6.37. Схема основной нейронной цепочки
Программа на PICBASIC имеет следующий вид:
‘Демонстрация работы нейрона
‘Установка параметров
low 0 ‘Светодиод 1 «спячка» выключен
low 1 ‘Светодиод 2 «охота» выключен
low 2 ‘Светодиод 3 «питание» выключен
start:
pot 3,255,b0 ‘Считывание показаний первого датчика
pot 4,255,b1 ‘Считывание показаний второго датчика
w2 = b0 * 3 ‘Умножение на весовой коэффициент
w3 = b1 * 2 ‘Умножение на весовой коэффициент
w4 = w2 + w3 ‘Сложение результатов
‘Установка пороговых значений
if w4 < 40 then feed ‘Много света. Питание
if w4 <= 300 then hunt ‘Света среднее количество. Охота
If w4 > 300 then snooze ‘Света мало. Спячка
‘Действия
feed: ‘Кормление
low 0
low 1
high 2
goto start:
hunt: ‘Охота
low 0
high 1
low 2
goto start:
snooze: ‘Спячка * не использовать ключ sleep *
goto start
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
От математической логики к логике диалектической
От математической логики к логике диалектической Г.С. Альтшуллер признавал: «Основной постулат[52] ТРИЗ опирается на фундаментальные положения диалектического материализма: технические системы развиваются по объективно существующим диалектическим законам; эти законы
Сплав логики, интуиции и опыта
Сплав логики, интуиции и опыта Пользуясь алгоритмом, изобретатель постепенно приближается к решению. Некоторые этапы этого пути почти нацело «логизированы», иногда логика отступает на второй план, и тогда алгоритм подталкивает в нужном направлении воображение
10.8. Об аксиомах арифметики и логики
10.8. Об аксиомах арифметики и логики Первичные положения арифметики принципиально имеют ту же природу, что и первичные положения геометрии, но они, пожалуй, еще проще и очевидней, их отрицание еще более невообразимо, чем отрицание геометрических аксиом. Возьмем, например,
1.2.3. Выбор источника питания и предупреждения по безопасности и перегрузкам
1.2.3. Выбор источника питания и предупреждения по безопасности и перегрузкам Для питания видеокамер следует использовать только стабилизированные блоки питания.Не рекомендуется применять простейшие импульсные блоки питания, поскольку они создают помехи в работе
Список деталей для системы слежения за направлением источника света и демонстрационного нейрона
Список деталей для системы слежения за направлением источника света и демонстрационного нейрона • (2) CdS фотоэлемент• (1) датчик изгиба (номинальное сопротивление 10 кОм)• (2) конденсатор 0,22 мкФ• (1) конденсатор 0,01 мкФ• (4) транзистор NPN TIP 120 Darlington• (2) резистор 10 кОм• (б)
Усталость света
Усталость света Загадочное «красное смещение» света, приходящего к нам от далеких галактик, обычно объясняется тем, что эти галактики удаляются от нас с огромной скоростью. Дедала, однако, больше привлекает гипотеза «усталости света», согласно которой свет по мере
Двоичная система счисления – идеальная система для ЭВМ
Двоичная система счисления – идеальная система для ЭВМ Мы уже говорили о том. что в нервных сетях действуют законы двоичного счисления: О или 1, ДА или НЕТ. Какими особенностями отличается двоичная система? Почему именно её избрали для ЭВМ?Мы принимаем как должное счёт до
§ 1.14 Энергия поля и давление света
§ 1.14 Энергия поля и давление света Давление, оказываемое светом на зеркало даже в вакууме, противоречит, например, принципу равенства действия и противодействия, когда он применяется только к веществу. Поэтому мы вынуждены будем "овеществить" лучистую энергию, чтобы
§ 4.2 Существуют ли фотоны — кванты света?
§ 4.2 Существуют ли фотоны — кванты света? Если пиво всегда продают в бутылках, содержащих пинту, отсюда вовсе не следует, что пиво состоит из неделимых частей, равных пинте. А. Эйнштейн о различии фотонной и планковской гипотезы [73, с. 147] Вопрос о природе волновых свойств
ГЛАВА 3 Изобретение конденсатора и создание первого электрохимического источника тока – важнейшие страницы в летописи электричества
ГЛАВА 3 Изобретение конденсатора и создание первого электрохимического источника тока – важнейшие страницы в летописи электричества Создание лейденской банкиЭтот зимний день 1745 г. запомнился голландскому профессору из г. Лейдена Питеру Мюсхенбруку (1692-1761) на всю жизнь.
Эталон силы света
Эталон силы света Свет — это электромагнитное излучение в диапазоне непосредственного восприятия человеком. Поэтому в технике и, соответственно, метрологии, ему уделяется большее внимание. Световых единиц, как известно, четыре — световой поток, сила света, светимость и
2.2. СОЗДАНИЕ ПЕРВОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОГО ТОКА
2.2. СОЗДАНИЕ ПЕРВОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОГО ТОКА В течение нескольких лет (1792–1795 гг.) А. Вольта не только повторил все опыты Л. Гальвани, но и произвел ряд новых исследований. И если Л. Гальвани искал причину обнаруженных им явлений как физиолог, то А. Вольта, будучи
Закон управления направлением вектора тяги
Закон управления направлением вектора тяги При проектировании управления карданом ЖРД для изменения направления вектора тяги посадочной ступени лунного корабля предусматривалось использование этого управления для совмещения вектора тяги с центром масс аппарата и
3.3. Наземная сеть NASA дальней космической радиосвязи и слежения за пилотируемыми кораблями
3.3. Наземная сеть NASA дальней космической радиосвязи и слежения за пилотируемыми кораблями Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями впервые проверялась на дальность до Луны в полете Apollo-8 в декабре 1968 г. (см. рис. 33.1).Сеть связи использует 2
Система смазки. Назначение и устройство
Система смазки. Назначение и устройство Смазочная система двигателя необходима для непрерывной подачи масла к трущимся поверхностям деталей и отвода от них теплоты.Поверхности сопряженных деталей двигателей отличаются высокой точностью и чистотой обработки. Однако
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉