Соревнования ВЕАМ-роботов
Соревнования ВЕАМ-роботов
Для конструкторов ВЕАМ-роботов ежегодно проводятся соревнования по Олимпийской системе, программа которых включает 14 пунктов. Традиция подобных ВЕАМ-игр началась с первых международных соревнований, проведенных в Глазго, Шотландия, в 1990 году. Основной идеей философии ВЕАМ-робототехники является эволюция роботов: развитие от простых конструкций к сложным системам. Примером является идея отказа от обычных схем построения робота, управляемого «сверху» с помощью ЦПУ в пользу поведенчески ориентированных снизу вверх систем типа «стимул-реакция», построенных по иерархически «слойному» принципу (нейронные сети, системы нервных волокон). Марк Тилден назвал подобные стимул-реактивные конструкции «нервной сетью».
Тилден разработал несколько интересных конструкций роботов (см. рис. 8.25). В них использованы нервные сети, смоделированные на транзисторах. Поскольку Марк Тилден запатентовал схемы подобных нервных сетей, то найти публикации подобных схем в открытой печати не представляется возможным. По этой причине я не могу сейчас представить вам образцы подобных схем. Тем не менее среди работ Тилдена имеется книга «Living Machines».
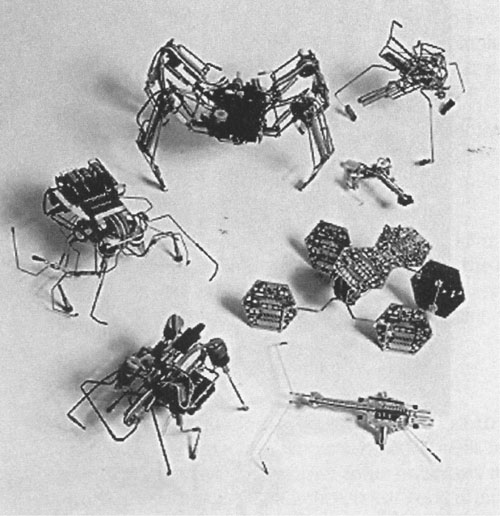
Рис. 8.25. BEAM-роботы
Рисунок 8.26 озаглавлен Gumby Trks. Это «существо» представляет собой тип биомеханического «ходока», рассчитанного на передвижение по поверхностям различных типов. Здесь представлен Gumby 1.0, собранный на восьми транзисторах и имеющий длину 30 см, который оставляет след на песке пустыни, передвигаясь с помощью двух стерженьков с зацепами.

Рис. 8.26. Путешественник Gumby
На рис. 8.27 представлен робот Walkman 1.0. Эта первая модель 12-транзисторных «микростержневых» передвигающихся роботов, собранная из остатков пяти одинаковых кассетный плееров типа Walkman. Робот имеет семь чувствительных датчиков, включая два «глаза», и с помощью системы из пяти моторов может преодолевать поверхности достаточно сложного рельефа.
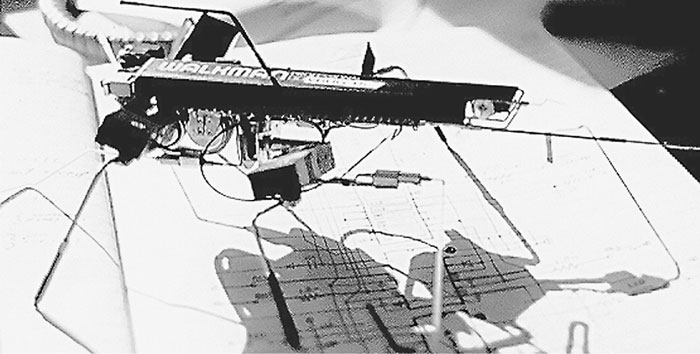
Рис. 8.27. Walkman 1.0
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Глава 2. Война роботов
Глава 2. Война роботов Боюсь, что войны дистанционно управляемых роботов уже надоели большинству читателей по набившим оскомину американским фантастическим фильмам и компьютерным играм. Но здесь речь идет о 1920-х годах, когда инженер Бекаури предложил вести следующую
Зачем создавать роботов?
Зачем создавать роботов? Применение роботов оказалось совершенно необходимым для многих производств, прежде всего потому, что стоимость «труда» робота оказалось значительно ниже стоимости такой же операции, производимой работником – человеком. Более того, робота
Применение роботов
Применение роботов Понятно, что гораздо проще создать «домашнего» робота, выполняющего какую-то одну работу. Например, уже сегодня существуют небольшие мобильные роботы, которые могут «самостоятельно» постричь траву на газоне. Эти роботы работают от солнечных батарей и
Использование роботов в промышленности
Использование роботов в промышленности Роботы незаменимы во многих отраслях производства. К примеру, роботы-сварщики повсеместно используются в производстве автомобилей. Другие роботы, снабженные краскораспылителями, занимаются покраской деталей. В радиоэлектронной
Война роботов
Война роботов В нашей мирной жизни устраиваются специальные соревнования – «войны роботов». Участники подобных соревнований создают специальных радиоуправляемых роботов разных весовых категорий и устраивают поединки один на один для определения лучшего
Глава 8 Поведенчески ориентированные схемы роботов, нейронные сети, организация нервной системы и предикативная архитектура
Глава 8 Поведенчески ориентированные схемы роботов, нейронные сети, организация нервной системы и предикативная архитектура В этой главе обсуждается класс роботов, не имеющих ЦПУ в основе схемы управления. Подобные роботы функционируют на принципах стимул-реакция,
ВЕАМ-робототехника
ВЕАМ-робототехника Идеология ВЕАМ-робототехники была предложена Марком Тилденом во время работы в университете Ватерлоо в Канаде. Заинтересованность в роботах стиля BEAM возникла у Марка после лекции, прочитанной Родни Бруксом в Массачусетском технологическом
Соревнования
Соревнования Следующая информация является кратким конспектом программы соревнований по ВЕАМ-роботам. Полную информацию о программе и правилах соревнования можно получить в Калифорнийском университете. Адрес будет указан в конце главы.Солнечная повозкаСоздать робот
Руководство по ВЕАМ-роботам
Руководство по ВЕАМ-роботам Вы можете заказать 120-страничное руководство по ВЕАМ за $20,00. Платежный чек нужно отправить в Университет Калифорнии, ВЕАМ games. Текущую переписку можно вести по адресу:BEAM Robot Olympics c/o Mark W. TildenMail Stop D449Los Alamos National LabsLos Alamos, NM 87545(505)667-2902Интернет-адрес
Цель создания шагающих роботов
Цель создания шагающих роботов Шагающие роботы могут передвигаться по пересеченной местности, недоступной для обычных колесных средств. С подобной целью обычно и создают шагающих
Простейшие устройства речи роботов
Простейшие устройства речи роботов Каждому ясно, что проще всего сделать говорящую модель, если в неё установить магнитофон. В отдельных случаях это решение подходит. Но в таком варианте больше механики, чем электроники, а сейчас электронные синтезаторы речи и вокодеры
7. Осязание роботов
7. Осязание роботов Создание по – настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами – от нервных центров в мозт передаётся вся нужная информация. Системой
Самовоспроизводство роботов
Самовоспроизводство роботов От искусственного интеллекта и самообучения ЭВМ и роботов остаётся совсем немного до проблемы самовоспроизводства роботов. Рассмотрим самую удивительную из всех кибернетических машин – машину, способную к самовоспроизводству или, ещё
11. Конструирование роботов
11. Конструирование роботов Роботы – игрушки На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух
Конструирование роботов – манипуляторов
Конструирование роботов – манипуляторов Многие наши школьники уже самостоятельно конструируют промышленных роботов – разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90).
Рабочие органы промышленных роботов
Рабочие органы промышленных роботов Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉