Конструирование роботов – манипуляторов
Конструирование роботов – манипуляторов
Многие наши школьники уже самостоятельно конструируют промышленных роботов – разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90). Рука робота укреплена на самодвижущейся тележке. Управляют рукой и тележкой с пульта дистанционно. Устройство предназначено для работы в токсичной среде.

Рис. 90. Механическая рука

Рис. 91. Космический шагоход «Марс-1»
Ребятами созданы многочисленные модели стопоходящих роботов, оснащённых манипуляторами. На рис. 91 показана действующая модель космического шагохода «Марс-1», разработанного учащимися Одессы.
Если вы займётесь конструированием моделей манипуляторов, то вам помогут некоторые типовые конструкторские решения индустриальной робототехники, с которыми мы сейчас познакомимся.
Системы привода современных манипуляторов. Современные системы привода промышленных манипуляторов примерно в 20% случаев пневматические, в 50% – гидравлические и в 30% – электрические. Гидравлический привод целесообразен в манипуляторах, оперирующих большими массами, пневматический, как более скоростной, – в схватывающих устройствах. Электрический привод удобнее использовать в обучающихся роботах, выполняющих различные рабочие операции (рис. 92). Он, как правило, состоит из тиристорного или транзисторного устройства питания

Рис. 92 Электрическии привод робота

Рис. 93 Зоны действия манипулятора

Рис. 94 Варианты установки манипулятора
‹-› Устройство поступательного движения ‹поворотное устройство
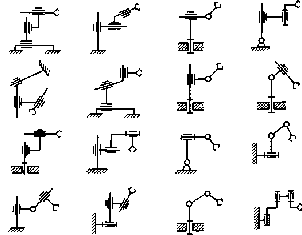
Рис. 95 Примеры кинематических схем манипуляторов электропривода и системы контроля за траекторией движения манипулятора. В систему контроля входят устройства регулирования тока электропривода, регуляторы частоты вращения и положения манипулятора. В отдельном шкафу размещено командно – программное устройство и телевизионный экран системы контроля и управления.
Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) – это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче.
Структура манипулятора в зависимости от его размещения на рабочем месте. Из рис. 94 видны возможные варианты установки манипулятора и характер движения его основных элементов в различных условиях. Стрелки на рисунке показывают виды движения устройств манипулятора.
На рис. 95 приведены примеры кинематических схем различных вариантов манипуляторов.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Глава 2. Война роботов
Глава 2. Война роботов Боюсь, что войны дистанционно управляемых роботов уже надоели большинству читателей по набившим оскомину американским фантастическим фильмам и компьютерным играм. Но здесь речь идет о 1920-х годах, когда инженер Бекаури предложил вести следующую
Зачем создавать роботов?
Зачем создавать роботов? Применение роботов оказалось совершенно необходимым для многих производств, прежде всего потому, что стоимость «труда» робота оказалось значительно ниже стоимости такой же операции, производимой работником – человеком. Более того, робота
Применение роботов
Применение роботов Понятно, что гораздо проще создать «домашнего» робота, выполняющего какую-то одну работу. Например, уже сегодня существуют небольшие мобильные роботы, которые могут «самостоятельно» постричь траву на газоне. Эти роботы работают от солнечных батарей и
Использование роботов в промышленности
Использование роботов в промышленности Роботы незаменимы во многих отраслях производства. К примеру, роботы-сварщики повсеместно используются в производстве автомобилей. Другие роботы, снабженные краскораспылителями, занимаются покраской деталей. В радиоэлектронной
Война роботов
Война роботов В нашей мирной жизни устраиваются специальные соревнования – «войны роботов». Участники подобных соревнований создают специальных радиоуправляемых роботов разных весовых категорий и устраивают поединки один на один для определения лучшего
Соревнования ВЕАМ-роботов
Соревнования ВЕАМ-роботов Для конструкторов ВЕАМ-роботов ежегодно проводятся соревнования по Олимпийской системе, программа которых включает 14 пунктов. Традиция подобных ВЕАМ-игр началась с первых международных соревнований, проведенных в Глазго, Шотландия, в 1990 году.
Цель создания шагающих роботов
Цель создания шагающих роботов Шагающие роботы могут передвигаться по пересеченной местности, недоступной для обычных колесных средств. С подобной целью обычно и создают шагающих
Простейшие устройства речи роботов
Простейшие устройства речи роботов Каждому ясно, что проще всего сделать говорящую модель, если в неё установить магнитофон. В отдельных случаях это решение подходит. Но в таком варианте больше механики, чем электроники, а сейчас электронные синтезаторы речи и вокодеры
7. Осязание роботов
7. Осязание роботов Создание по – настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами – от нервных центров в мозт передаётся вся нужная информация. Системой
Конструирование сенсорных устройств
Конструирование сенсорных устройств Как мы уже говорили, неотъемлемой частью систем осязания роботов являются сенсорные устройства, вызывающие срабатывание механизмов ориентации и захвата предметов. Контактное управление все чаще находит сейчас применение в разных
Самовоспроизводство роботов
Самовоспроизводство роботов От искусственного интеллекта и самообучения ЭВМ и роботов остаётся совсем немного до проблемы самовоспроизводства роботов. Рассмотрим самую удивительную из всех кибернетических машин – машину, способную к самовоспроизводству или, ещё
11. Конструирование роботов
11. Конструирование роботов Роботы – игрушки На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух
Рабочие органы промышленных роботов
Рабочие органы промышленных роботов Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие
28. Контакты: материалы, расчет и конструирование
28. Контакты: материалы, расчет и конструирование Различают контакты следующих типов.1. Разрывные, которые служат для применения при резком изменении параметров (включить или отключить, переключить). В свою очередь, этот тип контактов делится на нормальные, состоящие из
30. Электромагниты: расчет и конструирование. Теория подобия магнитных систем
30. Электромагниты: расчет и конструирование. Теория подобия магнитных систем Что касается электромагнитов как приборов, то их применяют в качестве коммутирующих устройств, в виде реле и удерживающих устройств.Электромагнит-реле – устройство, которое состоит из
Конструирование объема загородного дома
Конструирование объема загородного дома Связка «планировка – фасад» гораздо сложнее, чем может показаться. Как я уже отмечал, она требует от проектировщика удержания в голове образа будущего дома. Мало того, этот образ должен во многом совпадать с образом, который