Рабочие органы промышленных роботов
Рабочие органы промышленных роботов
Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие органы типа схвата и технологические рабочие органы. К первой группе относят механические с жёсткими или пружинными губками, вакуумные, электромагнитные и струйные схваты, а ко второй – клещи для контактной точечной сварки, горелку для электродуговой сварки, распылитель для окраски, специальные инструменты.
Конструируя механические схваты промышленных роботов, приходится учитывать конкретный тип детали или группы деталей, их форму, материалы и условия технологического процесса. Важные критерии при этом – необходимая точность удержания детали и допустимо усилие на губках. Перечисленные соображения привели к тому, что в настоящее время существует много различных схватов, отличающихся кинематической схемой, формой губок и конструкцией. Как правило, механический схват приводит в движение пневматический цилиндр, расположенный в центре кисти робота. Управляет таким цилиндром блок управления роботом, а воздух поступает от общей магистрали. Конструкции механических схватов могут иметь разные размеры, расположение и форму губок, тип привода и т.д. Для удержания легко деформируемых изделий используют эластичные губки, в том числе и надувные.
Для удержания таких хрупких предметов, как, например, кинескоп телевизора, применяют вакуумные схваты.
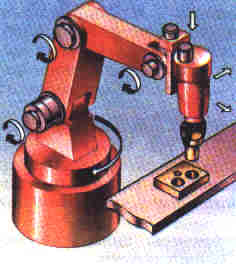
Рис. 96. Общий вид типового индустриального сборочного робота
На рис. 96 изображён общий вид типового индустриального сборочного робота. Грубые движения робота выполняют мощные системы привода, подводящие его схват с устройствами точной ориентации к рабочему месту. После этого в действие вступают устройства точной ориентации схвата, находящиеся на его головке.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Рабочие лошадки вермахта
Рабочие лошадки вермахта Если проходимость стандартного грузовика «3,6–36S» по проселочным дорогам оценивалась как невысокая, то полноприводного «3,6–6700A» – как удовлетворительная (недостатком этого варианта грузовика все же были сдвоенные задние колеса, значительно
Глава 2. ПОТРЕБИТЕЛИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И ОРГАНЫ РОСТЕХНАДЗОРА
Глава 2. ПОТРЕБИТЕЛИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И ОРГАНЫ РОСТЕХНАДЗОРА 2.1. Принципы взаимоотношений В отличие от договорных отношений потребителей электроэнергии с энергоснабжающими коммерческими организациями, имеющих эпизодический характер (в пределах срока действия
3.10.3. Из промышленных (изготовленных на производстве) датчиков влажности
3.10.3. Из промышленных (изготовленных на производстве) датчиков влажности Из промышленных датчиков влажности, что можно приобрести почти повсеместно сегодня, наиболее популярны HONEY HIH-4000 (НШ-4010) (стоимость 500–700 руб.) с 3-х контактным выходным разъемом 3-PIN SIP С (выводы: «+», «-«,
1.5.4. Органы управления лицевой и задней панели
1.5.4. Органы управления лицевой и задней панели Передняя панель (4-канальный регистратор) представлена на рис. 1.14.В табл. 1.1 представлен функционал клавиш видеорегистратора.Задняя панель устройства представлена на рис. 1.15. Рис. 1.14. Функциональное назначение клавиш на
3.1 Формирование промышленных текстильных центров на базе кустарных
3.1 Формирование промышленных текстильных центров на базе кустарных В XX веке ручное ткачество — один из древнейших видов декоративного искусства — развивалось, на наш взгляд, в двух направлениях. С одной стороны продолжало существовать ремизное ткачество, и на его базе
1.3. Органы контроля и надзора за безопасностью и охраной труда в РФ
1.3. Органы контроля и надзора за безопасностью и охраной труда в РФ В соответствии со ст. 20 Федерального Закона «Об основах охраны труда в РФ» государственный контроль и надзор за соблюдением законодательных и иных нормативных актов об охране труда осуществляются
5. Органы и комитеты по стандартизации
5. Органы и комитеты по стандартизации Закон Российской Федерации «О техническом регулировании» (статья 14) формулирует основные направления деятельности Национального органа Российской Федерации по стандартизации:1) утверждение национальных стандартов;2) принятие
9. Органы по сертификации
9. Органы по сертификации Орган по сертификации (ОС) осуществляет следующие действия:1) сертификацию товаров, работ и услуг; выдачу сертификатов и лицензий на применение знаков соответствия;2) проведение инспекционного контроля за сертифицированными товарами, работами
30. Органы и комитеты по стандартизации
30. Органы и комитеты по стандартизации Закон Российской Федерации «О техническом регулировании» (статья 14) формулирует основные направления деятельности Национального органа Российской Федерации по стандартизации.Согласно положениям вышеозначенного Закона в состав
51. Органы по сертификации
51. Органы по сертификации Орган по сертификации (ОС) осуществляет следующие действия:1) сертификацию товаров, работ и услуг; выдачу сертификатов и лицензий на применение знаков соответствия;2) проведение инспекционного контроля за сертифицированными товарами, работами и
Органы управления и запасы
Органы управления и запасы Какая бы ни использовалась конструкция, если она не является полностью пассивной, ею нужно управлять. Более совершенные регуляторы и программное обеспечение обычно экономят еще 10–30 % остающегося энергопотребления, сбережения за счет
1.3.1. СВЧ-установки и их рабочие камеры
1.3.1. СВЧ-установки и их рабочие камеры При любом назначении СВЧ электротермической установки она имеет структурную схему, приведенную на рис. 1.9. Рис. 1.9. Структурная схема СВЧ-установкиКак было замечено выше, основным генератором СВЧ-энергии является магнетрон. Из
4.6. Система сертификации в области потенциально опасных промышленных производств, объектов и работ
4.6. Система сертификации в области потенциально опасных промышленных производств, объектов и работ Федеральный горный и промышленный надзор России в соответствии с Указом Президента Российской Федерации от 18 февраля 1993 г. № 234 является федеральным органом
6.1. ЭКСПЛУАТАЦИОННЫЕ МАТЕРИАЛЫ, РАБОЧИЕ И СПЕЦИАЛЬНЫЕ ЖИДКОСТИ
6.1. ЭКСПЛУАТАЦИОННЫЕ МАТЕРИАЛЫ, РАБОЧИЕ И СПЕЦИАЛЬНЫЕ ЖИДКОСТИ 6.1.1. Топливо Бензин. Для обеспечения надежной работы карбюраторных двигателей на всех режимах бензины должны обладать: высокой детонационной стойкостью; оптимальным фракционным составом; малым содержанием
6.1.3. Рабочие и специальные жидкости
6.1.3. Рабочие и специальные жидкости В зависимости от назначения и свойств жидкости делятся на охлаждающие, тормозные, амортизационные и пусковые.Гидравлические масла работают при больших перепадах температур (от —40 до +80 °C), давлениях 10–15 МПа, скоростях скольжения до