Моделирование робото-технических радиоэлектронных устройств из модулей
Моделирование робото-технических радиоэлектронных устройств из модулей
Типовые модули являются основой всех промышленных радиоэлектронных разработок. В этом отношении наиболее убедителен пример конструирования современных ЭВМ. Первые ламповые ЭВМ состояли из множества типовых модулей. Транзисторные ЭВМ или, как их называют, ЭВМ второго поколения (серия «Минск» и др.) также собраны из транзисторных модулей. Для удобства конструирования ЭВМ второго поколения было разработано несколько серий типовых радиоэлектронных модулей.
Вывод: нужно осваивать модульное конструирование! Это современно, экономично и удобно.
Модульный конструктор. Радиокубики помогли нам понять назначение и свойства различных радиодеталей и транзисторов. Из кубиков можно собирать отдельные простые действующие устройства: мультивибраторы, ждущие мультивибраторы, триггеры и т.п. Но это только кирпичики более сложных радиоэлектронных устройств различного назначения.
Так же как многоэтажный современный дом собирают из отдельных простых элементов, так и самые сложные электронные аппараты, и робототехнические устройства в том числе, собирают из отдельных модулей – мультивибраторов, триггеров и т. п. Именно из таких модулей создавали ЭВМ, а мы из них будем собирать различные занимательные конструкции. Модули помогут нам моделировать робототехнические системы речи, слуха, зрения.
Промышленность выпускает модульный конструктор (рис. 14), состоящий из нескольких модулей. В первую очередь нам потребуются: модуль А – логический элемент ЗИ – НЕ с открытым выходом; модуль Б – маломощный логический элемент ЗИ – НЕ; модуль В – триггер, составленный из двух элементов И – НЕ; модуль Г – ждущий мультивибратор; модуль Е1 – мультивибратор; модуль Е2 – управляемый мультивибратор.
Используя модульные блоки, можно собирать модели различных устройств со звуковым выходным сигналом, которые можно будет использовать в различных робототехнических устройствах.
Одно из простейших устройств такого рода – генератор звуковой частоты (рис. 15). Из схемы видно, что на входы модуля D3 поданы сигналы с двух мультивибраторов D1 и D2. Один из них, D1, вырабатывает сигнал с частотой около 2000 Гц, второй, работающий с частотой около одного герца, периодически прерывает звуковой сигнал.

Рис. 14. Модульный конструктор
А – выходной усилитель, Б – элемент ЗИ НЕ, В – триггер, Г~ждущий мультивибратор, Е1 – мультивибратор, Е2 – управляющий мультивибратор
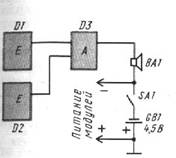
Рис. 15 Генератор звуковой частоты (наутофон)

Рис. 16 Сигнальное устройство с прерывистыми сигналами
Если дополнить этот генератор ещё одним мультивибратором (рис. 16), то можно получить сигнальное устройство, звуковые импульсы которого будут прерывистыми. Модули этого устройства такие же, как и в предыдущем, только у мультивибратора D3 конденсаторы Cl, C2 имеют ёмкость по 2 мкФ.
Такой гудок может выполнять функции сторожевого устройства. Для этого надо отключить модуль D2, а освободившийся вход модуля D4 через пару замкнутых сторожевых контактов или тонкую сторожевую проволоку соединить с плюсовым выводом батареи GB1. При размыкании контактов или при обрыве проволоки раздастся прерывистый – тревожный сигнал. По схеме рис. 17 можно собрать гудок, тон которого будет периодически меняться.
В тех случаях, когда необходимо ограничить время звучания гудка, устройство можно построить по схеме рис. 18. При нажатии на кнопку SB1 подаётся запускающий перепад напряжения на вход ждущего мультивибратора D1. На его входе появляется высокий логический уровень напряжения, и начинает работать управляемый мультивибратор D2. Его сигнал через логический элемент D3 поступает на динамическую головку ВА1.

Рис. 17. Схема гудка с периодически меняющимся тоном

Рис. 18. Схема гудка с ограниченным временем звучания
Примером устройства, использующего одновременно и звуковую, и световую сигнализацию, может служить контрольное устройство для дежурного робота (рис. 19). Рассмотрим работу этого устройства. Задающий мультивибратор D1 периодически переключает триггер D2 в состояние, при котором на его выходе присутствует высокий уровень напряжения. Этот уровень приложен к входу логического элемента D8, нагруженного сигнальной лампой HL1. Выходной сигнал мультивибратора D6 прерывает свечение лампы, делая световой сигнал более заметным.
С выхода триггера D2 сигнал поступает также на элемент совпадения D3. Сигнал с выхода инвертора D4 включает управляемый генератор D5. Выходной сигнал этого генератора через элемент D7 подан на динамическую головку ВА1. Поскольку на второй вход элемента D7 подан также сигнал с мультивибратора, звуковой сигнал будет прерывистым.

Рис. 19. Схема контрольного устройства для дежурного робота
Моделирование радиоэлектронных робототехнических устройств на микросхемах. Самыми совершенными радиоэлектронными модулями являются интегральные микросхемы, содержащие в небольшом объёме очень большое число радиодеталей. На рис. 20 показан кристалл микросхемы рядом с муравьём. Не правда ли, впечатляющее сравнение?
Если вы хорошо усвоили все предыдущее, то сумеете работать и с микросхемами. Здесь придётся пользоваться специальным паяльником с очень тонким жалом, пинцетом и другими миниатюрными инструментами. С микросхемами надо обращаться очень аккуратно и грамотно.
Устройства, собранные на микросхемах, как правило, не требуют налаживания и конструктивно выглядят весьма простыми. Большой популярностью пользуются микросхемы серии К155, выполненные на основе транзисторно – транзисторной логики (ТТЛ). В этой серии есть многовходовые элементы И – НЕ, триггеры, счётчики, дешифраторы, запоминающие и другие устройства.
Чтобы помочь читателям освоить микросхемы и приступить к сознательному моделированию микроэлектронных робототехнических устройств, разработан и выпускается промышленностью «Конструктор для изучения микросхем и логических основ построения ЭВМ» (рис. 21). Он очень прост и может быть выполнен дома или в кружке робототехники. Этот конструктор позволяет на одной из самых распространённых микросхем К155 Л A3, состоящей из четырёх логических элементов 2И – НЕ, проделать десятки экспериментов.

Рис. 20. Кристалл микросхемы и муравей

Рис. 21 Конструктор для изучения микросхем и югических основ построения ЭВМ
Он состоит из упомянутой микросхемы и набора резисторов, конденсаторов, светодиодов, кнопок и гнёзд. Соединяя отдельные элементы конструктора проводниками, подключаемыми к гнёздам, можно собирать на микросхеме до 30 радиоэлектронных устройств.
Кибернетический конструктор. Выпускаемый промышленностью кибернетический конструктор (рис. 22) позволяе! собирать из микросхем серии К155 основные узлы ЭВМ и различные занимательные радиоэлектронные устройства. С помощью конструктора можно ознакомиться с функциями половинного сумматора ЭВМ, дешифратора, регистра, накопителя, счётчика, элементов памяти ЭВМ и т д. Он позволяет моделировать ряд устройств, различных робототехнических систем.

Рис. 22 Кибернетический конструктор для изучения основных элементов и узлов ЭВМ и моделирования различных работа – технических систем.
Принцип его построения такой же, что и у конструктора, предназначенного для изучения логических основ построения ЭВМ, но в нём предусмотрена сборка устройств, состоящих из нескольких (до четырёх) микросхем. Этот конструктор также может быть изготовлен в кружке робототехники.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
МОДЕЛИРОВАНИЕ С ПОМОЩЬЮ «МАЛЕНЬКИХ ЧЕЛОВЕЧКОВ»
МОДЕЛИРОВАНИЕ С ПОМОЩЬЮ «МАЛЕНЬКИХ ЧЕЛОВЕЧКОВ» С каждой новой модификацией детерминированность шагов АРИЗ возрастает. Усиливается и информационное обеспечение. Тем не менее АРИЗ не отменяет необходимости думать, он лишь управляет процессом мышления, предохраняя от
3.8. Моделирование
3.8. Моделирование До сих пор, говоря об ассоциациях представлений, мы полностью игнорировали их динамический, временной аспект, т. е. рассматривали связываемые представления как статические и не имеющие никакой координаты во времени. Между тем идея времени может активно
Проектирование и моделирование
Проектирование и моделирование Роботы оказались способны к выполнению не только циклических операций. Компании – производители широко используют системы компьютерного проектирования (computer aided design CAD), управляемого компьютерного производства (computer aided manufacturing CAM) и
4.5.2. Ускорители нанотехнологии. Квантовое моделирование и масштабные эксперименты
4.5.2. Ускорители нанотехнологии. Квантовое моделирование и масштабные эксперименты Выше говорилось о том, что научные достижения имеют тенденцию «эмигрировать» из лабораторий и превращаться в инновационные проекты, причем этот процесс протекает ускоренно, что и
3. Моделирование – экспериментальная основа роботостроения
3. Моделирование – экспериментальная основа роботостроения Пытаться конструировать радиоэлектронные системы роботов, не представляя хорошо их теории и физических основ, – это значит работать с очень низким коэффициентом полезного действия. Создать какую – либо
Модель и моделирование
Модель и моделирование Современные научно – технические исследования и промышленное строительство ведутся с огромным размахом, и на них затрачивается много средств (вспомним хотя бы о космических исследованиях). Поэтому ошибки или просчёты могут привести к
Моделирование радиоэлектронных устройств из радиокубиков
Моделирование радиоэлектронных устройств из радиокубиков Радиокубики – это небольшие пластмассовые коробки, в которые вмонтированы различные радиодетали и магниты, притягивающие кубики один к другому и соединяющие их в единое работающее устройство (рис. 10). На каждом
4. Моделирование речи
4. Моделирование речи Искусственная речь и связанные с ней проблемы Говорящие машины уже существуют. Словарь их пока небольшой и состоит из слов, произнесённых человеком и записанных на магнитный барабан. Наиболее известный тому пример – говорящие часы, работающие на
Моделирование речи автоматов
Моделирование речи автоматов Как мы уже видели из рис. 23, спектр речи автомата – сирены значительно проще речи человека. Чтобы получить сигнал сирены, нужно сформировать звуковой сигнал, частота которого периодически изменялась бы по пилообразному
5. Моделирование слуха
5. Моделирование слуха Бионика и слух Исключительное значение для роботостроения имеет совершенствование технических приборов, воспринимающих звуковые сигналы. Звук быстро позволяет передавать командные и управляющие сигналы. Разработка новых систем слуха, пригодных
Моделирование систем слуха
Моделирование систем слуха Прежде чем приступить к конструированию устройства слуха роботов, смоделируем отдельные элементы этих систем.На рис. 34 – 37 показаны схемы усилителей звуковой частоты.Начинать конструирование моделей слуховых систем лучше всего с
6. Моделирование зрения
6. Моделирование зрения Специалисты в области бионики ведут работы по моделированию некоторых функций человеческого глаза. Создана электронная модель сетчатки, воспроизводящая работу фоторецепторов в центральной ямке и на периферии, предложено устройство, аналогичное
8. Моделирование нервной системы (нейроны и нейронные сети)
8. Моделирование нервной системы (нейроны и нейронные сети) Кибернетика и нервная система Многое в работе нервной системы человека до сих пор непонятно учёным. Тем не менее общие закономерности управления, установленные кибернетикой, справедливы и для неё. Кибернетика
9. Моделирование памяти и вычислительных систем
9. Моделирование памяти и вычислительных систем На пути к созданию искусственного мозга Важнейшим объектом исследования нейрокибернетики является самая сложная биологическая система – человеческий мозг. Исследуя процессы, происходящие в головном мозге, можно изучить