Моделирование речи автоматов
Моделирование речи автоматов
Как мы уже видели из рис. 23, спектр речи автомата – сирены значительно проще речи человека. Чтобы получить сигнал сирены, нужно сформировать звуковой сигнал, частота которого периодически изменялась бы по пилообразному закону.
Функциональная схема электронной сирены приведена на рис. 27. Прямоугольные импульсы с выхода задающего мультивибратора через диод VD1, пропускающий только отрицательные полуволны импульсов, поступают на зарядно – разрядную цепь, состоящую из зарядного резистора R 3 ap, конденсатора С1 и резистора цепи разрядки К ра зр – Зарядно – разрядная цепь превращает прямоугольный импульс мультивибратора в пилообразный импульс, фронт и спад которого и будут определять характер звучания тревожных сигналов сирены. Второй мультивибратор задаёт среднюю частоту тона сирены.
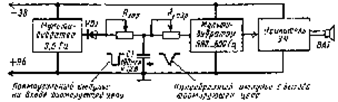
Рис. 27. Функциональная схема электронной сирены
Регулируя резисторы R 3a p (сопротивлением 5…20 кОм) и R pa3 p = (390… 100 кОм), добиваются нужного качества звучания сирены.
Электронный музыкальный автомат. Сравнительно простой электронный музыкальный автомат может быть собран по схеме рис. 28 («Радио», 1982, 12).
Подбирают ту или иную мелодию подстроечными резисторами цифро-аналогового преобразователя (ЦАП) (всего автомат выдаёт восемь звуков различной тональности). Частоту тактового генератора изменяют (если это необходимо) подборкой резистора R1.
Такой автомат удобно использовать в качестве квартирного звонка. Для этого его следует дополнить реле выдержки времени, усилителем мощности и сетевым блоком питания (рис. 29).
Если кратковременно нажать на кнопку SB1, сработает реле К1 и контактами К 1.1 самоблокируется. Автомат начнёт воспроизводить мелодию. По окончании мелодии счётчик возвратится в исходное состояние и на прямом выходе триггеров DD2.1, DD2.2, DD3.1,
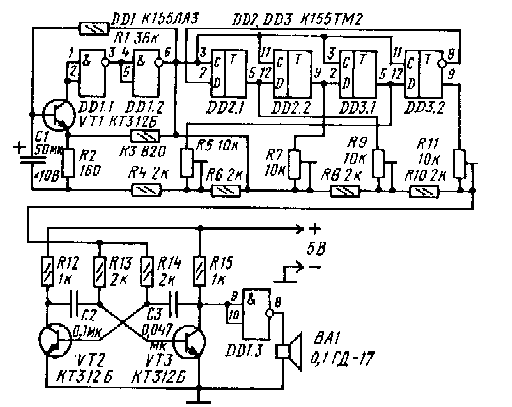
Рис. 28. Простейший электромузыкальный инструмент
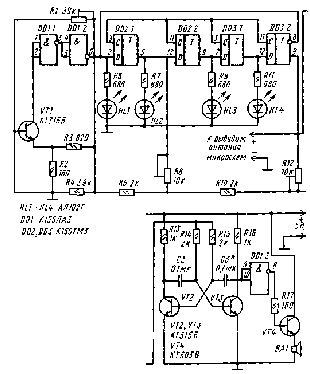
Рис. 29 Музыкальный автомат
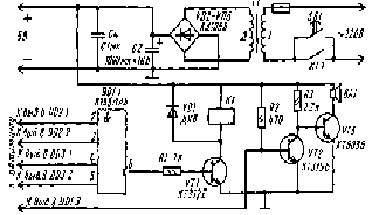
Рис. 30 Автомат выдержки времени уcuлитель мощности и сетевой блок питания
DD3.2 29 появится напряжение высокого уровня. Соответственно на выходе элемента DD1.1 (рис. 30) будет напряжение низкого уровня и реле К1 отпустит якорь. Автомат выключится.
Усилитель мощности собран на двух транзисторах (VT2 и VT3) и нагружен динамической головкой ВА1.
Моделирование речи животных. Как вы убедитесь, схемы звуковых автоматов весьма просты. В них получение нужных сигналов сводится к включению и выключению (манипуляции) задающим генератором тона. Правда, в сирене использована не манипуляция, а модуляция, но по довольно простому закону – пилообразному. Эти автоматы очень просты в налаживании и часто работают сразу же после сборки. Значительно сложнее моделировать даже самую элементарную речь животных. Здесь законы модуляции гораздо многообразнее. Например, диаграмма кошачьего мяуканья (рис. 31, а) выглядит как плавное нарастание сигнала до максимума с последующим плавным спадом, а лай собаки – как наложение колебаний двух генераторов низкой частоты f t и более высокой Г 2 (рис. 31,6).
Моделирование речи человека. Из всех живых существ, населяющих мир, только человек оказался способным развить голосовой аппарат для кодирования и передачи сложнейшей информации. Учёные проводят сложнейшие исследования по автоматической расшифровке и имитации звуков речи, но пока ещё речевые сигналы содержат много загадок и не поддаются распознаванию даже с помощью тончайших анализаторов, использующих самые мощные современные электронные вычислительные машины.
Известны попытки имитации голоса человека с помощью электронных устройств. Так, роботостроитель Бруинсма, автор книги «Практические схемы роботов» (М.: Госэнер – гоиздат, 1962), создал для автомата «Игра в крестики и нолики» электронный прибор, имитирующий восторженный возглас человека при выигрыше автомата и «унылое ворчание» при проигрыше. В приборе более 10 мультивибраторов и других устройств. Однако его работа оставляет желать лучшего. Словом, моделирование речи – очень трудная задача.
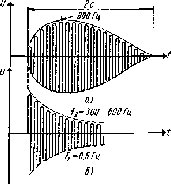
Рис. 31 Эпюры напряжений
А – мяуканье кошки, б – лай собаки
Однако мы уже отмечали, что с помощью мультивибраторов можно получать звуки, близкие к звучанию некоторых гласных букв (А, О, И). Исследования показывают, что звучания этих гласных складываются из двух частот, т.е. для моделирования нужна параллельная работа по меньшей мере двух мультивибраторов.
Маломощные усилители речи роботов на микросхемах. В случаях, когда не требуется большая громкость звучания того или иного устройства речи робота и достаточно выходной мощности усилителя около 0,1 Вт, можно использовать усилители звуковой частоты, разработанные для миниатюрных приёмников («Радио», 1985, № 10). Такие усилители могут пригодиться в автоматических речевых устройствах.
Принципиальная схема первого варианта усилителя показана на рис. 32, а. Для повышения входного сопротивления усилителя в цепь эмиттера транзистора VT1 включён резистор R3 (его сопротивление может быть 110…240 Ом). Рекомендуемое сопротивление головки ВА1 громкоговорителя 6…8 Ом.
Второй вариант усилителя (рис. 32,6) отличается повышенной экономичностью. В первой ступени необходим транзистор с большим коэффициентом передачи тока, способный работать в режиме малых токов. Кроме указанного на схеме можно использовать транзисторы КТ342А, КТ342Б и КТ3102А – КТ3102Е. Входное сопротивление усилителя 10 кОм; ток, потребляемый первой ступенью, 0,3…0,5 мА. Конденсатор С2 предотвращает самовозбуждение усилителя на высокой частоте. Транзистор VT2 выполняет функции развязывающего фильтра в цепи питания транзистора VT1. Это позволило обойтись без дополнительного оксидного конденсатора и резистора.
В третьем варианте усилителя (рис. 32, в) функции входного транзистора выполняет микросхема DA1 на полевых транзисторах. Достоинство такой замены – высокое входное сопротивление (оно определяется сопротивлением резистора R1 и в зависимости от требований может быть в пределах от нескольких десятков килоом до 1 МОм).
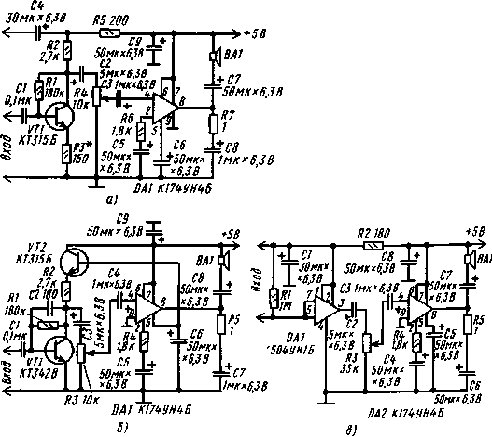
Рис. 32. Маломощные усилители речи роботов на микросхемах
Все рассмотренные усилители при входном напряжении 30…50мВ обеспечивают выходную мощность 0,1…0,12 Вт. Ток, потребляемый ими в режиме покоя, не превышает соответственно З…ЗД 2… 2,5 и 4…4,5 мА; при максимальной громкости 40 мА. Усилители не критичны к типу используемых деталей и обладают запасом устойчивости.
Микросхему К504УН1Б можно заменить полевыми транзисторами КП103Е, КП201Е, КП201Ж или КП201И. При использовании оксидных конденсаторов К50 – 6, резисторов МЛТ – 0,125 и переменного резистора СПЗ – Зб размеры платы этого усилителя не превышают 25 х 30 мм.
Выходные ступени описанных усилителей в налаживании не нуждаются. Их чувствительность можно регулировать изменением сопротивления резисторов, подключённых к выводу 2 микросхемы, в пределах 240 Ом…2,7 кОм (при уменьшении сопротивления чувствительность увеличивается).
Необходимо иметь в виду, что номинальное значение сопротивления резистора R3 и входное сопротивление усилителя по схеме на рис. 45, а зависят от сопротивления резистора R1. Резистор R3 подбирают, контролируя напряжение на коллекторе транзистора VT1, которое должно находиться в пределах 1,4…1,7 В.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
ГЛАВА 4 Первые работы по конструированию автоматов
ГЛАВА 4 Первые работы по конструированию автоматов Еще в том же, 1943 г., офицеры ГАУ (и в первую очередь генерал-лейтенанты А.А. Благонравов и В.Г. Федоров) совместно с ведущими отечественными конструкторами-оружейниками в достаточно короткие сроки попытались найти
Таблица 1 Тактико-технические характеристики автоматов, карабинов и ручных пулеметов под «промежуточный» патрон
Таблица 1 Тактико-технические характеристики автоматов, карабинов и ручных пулеметов под «промежуточный» патрон Наименование Автомат Федорова обр. 1916 г. АК АКС СКС АКМ АКМС РПК РПКС Калибр(мм) 6,5 7,62 7.62 7.62 7,62 7,62 7,62 7,62 Масса (кг) 4.4 4,86 4.86 3,9 3,6 3,8 5,6 5,9 Длина общая
Таблица 2 Тактико-технические характеристики автоматов и ручных пулеметов под «малоимпульсный» патрон
Таблица 2 Тактико-технические характеристики автоматов и ручных пулеметов под «малоимпульсный» патрон Наименование АК-74 АКС-74 АКС-74У РПК-74 РПКС-74 АК-74М РПК-74М Калибр, мм 5.45 5,45 5,45 5.45 5.45 5,45 5,45 Масса, кг 3.6 3,67 3.0 5.46 5,61 3,6 5,46 Длина общая, мм 940 940 730 1060 1060 940 1065 Длина со слож.
Таблица 3 Тактико-технические характеристики автоматов под «малоимпульсный» патрон
Таблица 3 Тактико-технические характеристики автоматов под «малоимпульсный» патрон Наименование АК101 АК102 АК103 АК-104 АК-105 АКК-971 АН-94 А-91 А-91 А-91 Калибр, мм 5.56 5.56 7.62 7,62 5,45 5,45 5,45 5,45 5,56 7,62 Масса, кг 3.8 3.6 3.8 3,6 3,5 3,3 4,3 1,75 1.75 1*75 Длина общая, мм 943 824 943 824 824 965 943 604 604 604 Длина со слож.
Таблица 4 Тактико-технические характеристики автоматов под специальные патроны
Таблица 4 Тактико-технические характеристики автоматов под специальные патроны Наименование АПС 9 А—91 ВСК—94 ВСС АС СР—3 «Вихрь» Калибр, мм 5.66 9 9 9 9 9 Масса, кг 2.46 2,55 3.34 3,41 2,96 2,0 Длина общая, мм 823 604 900 894 875 640 Длина со слож. прикладом, мм 615 384 — — 615 396 Длина ствола,
3.8. Моделирование
3.8. Моделирование До сих пор, говоря об ассоциациях представлений, мы полностью игнорировали их динамический, временной аспект, т. е. рассматривали связываемые представления как статические и не имеющие никакой координаты во времени. Между тем идея времени может активно
Проектирование и моделирование
Проектирование и моделирование Роботы оказались способны к выполнению не только циклических операций. Компании – производители широко используют системы компьютерного проектирования (computer aided design CAD), управляемого компьютерного производства (computer aided manufacturing CAM) и
Распознавание речи
Распознавание речи Диапазон слышимости человеческого уха лежит в пределах от 10 до 15.000 Гц. Для регистрации звуковых колебаний могут использоваться микрофоны и усилители, причем диапазон «слышимости» микрофона, как правило, превышает возможности уха. Для робототехники
Проект 1: Программируемая схема распознавания речи
Проект 1: Программируемая схема распознавания речи Первым проектом является создание программируемой схемы распозна-, -т вания речи. Термин «программируемый» используется в том смысле, что вы T"7V можете запрограммировать устройство для распознавания 40 отдельных слов по
Обучение процессу восприятия речи
Обучение процессу восприятия речи Мы принимаем собственные способности к распознаванию речи как нечто само собой разумеющееся. Однако процесс выделения речи одного человека в толпе собравшихся на вечеринке лежит далеко за пределами возможностей современных систем
Распознавание речи в зависимости и независимо от говорящего
Распознавание речи в зависимости и независимо от говорящего В процессе распознавания речи можно выделить две задачи: распознавание речи для конкретного говорящего и независимо от него. Система распознавания речи «обучается» речью конкретного человека, который будет в
Виды распознавания речи
Виды распознавания речи Системы УРР имеют еще одно специфическое ограничение, которое относится к виду или стилю распознаваемой речи. Предполагается существование трех видов речи: раздельная, связная и непрерывная.Раздельная речьСистемы УРР, оперирующие с раздельной
Список деталей для интерфейса распознавания речи
Список деталей для интерфейса распознавания речи • (5) Транзистор NPN TIP 120• (5) Транзистор PNP TIP 125• (1) ИС 74154 4/16 – декодер• (1) ИС 4011 логический элемент ИЛИ-НЕ• (1) ИС 4049 – 6 буферов• (1) ИС 741 операционный усилитель• (1) Резистор 5,6 кОм, 0,25 Вт• (1) Резистор 15 кОм, 0,25 Вт• (1) Головная
4. Моделирование речи
4. Моделирование речи Искусственная речь и связанные с ней проблемы Говорящие машины уже существуют. Словарь их пока небольшой и состоит из слов, произнесённых человеком и записанных на магнитный барабан. Наиболее известный тому пример – говорящие часы, работающие на
Простейшие устройства речи роботов
Простейшие устройства речи роботов Каждому ясно, что проще всего сделать говорящую модель, если в неё установить магнитофон. В отдельных случаях это решение подходит. Но в таком варианте больше механики, чем электроники, а сейчас электронные синтезаторы речи и вокодеры
5. Моделирование слуха
5. Моделирование слуха Бионика и слух Исключительное значение для роботостроения имеет совершенствование технических приборов, воспринимающих звуковые сигналы. Звук быстро позволяет передавать командные и управляющие сигналы. Разработка новых систем слуха, пригодных