Робот типа «рука»
Робот типа «рука»
Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, число рук и пальцев на руке, грузоподъёмность, точность движения и т.д. Независимо от того, стоит ли робот возле станков, передвигается между ними или ползает под потолком, у него всегда есть мощная механическая рука с двумя или четырьмя пальцами. Роботы отличаются один от другого общим видом, габаритами и техническими характеристиками, но у них есть и общие признаки. На рис. 4 изображена структурная схема такого робота. Рукой управляет либо оператор с пульта, либо мозг робота – его ЦВМ (цифровая вычислительная машина). В блоке памяти находится программа действий робота, которую вводят в него или которую он приобретает во время обучения.
Общий блок управления электрическими, гидравлическими или пневматическими двигателями, расположенными в плече руки, предплечье, в кисти, состоит из цепей управления движением руки по каждой из координатных осей. Сколько степеней свободы у руки, столько и цепей управления.
Робот – манипулятор, встав на рабочее место, согласовывает свою работу с обслуживаемым технологическим оборудованием. Движения руки точные, повороты строго рассчитаны во времени. Робот с оборудованием образует автоматизированную ячейку. Из таких ячеек составляют робототехнологические комплексы или линии. Одно из наиболее распространённых занятий роботов – манипуляторов – окраска изделий.
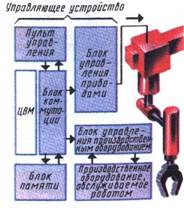
Рис. 4. Структурная схема робота.
Окрашивают обычно способом набрызгивания. Чтобы защититься от вредного действия распыляемой краски, приходится работать в специальной маске, а рабочую зону оборудовать специальными защитными устройствами. Это сложно, дорого и все равно небезвредно для человека. Если же окраску изделий поручить манипулятору, а управление им человеку, это оздоровит условия работы и повысит производительность труда.
Процессы формовки кирпича обычно высокомеханизированы. За формовкой следуют операции пропаривания, обжига, требующие перекладывания кирпича и складывания его в пирамиды определённой конфигурации. Эти операции также можно механизировать и автоматизировать, используя манипуляторы. Механическая рука может брать одновременно 5-6 и более кирпичей, каждый из которых весит до 4 кг, и не боится обжечься, даже если они только что из печи.
Стеклянные заготовки для телевизионного кинескопа могут весить 10-15 кг. Сложный технологический процесс их изготовления требует многократной установки, съёма, погрузки. Сотни людей были заняты этой малопроизводительной работой, но им на смену пришли механические руки.
Эти несколько скупых примеров ясно свидетельствуют о том, как широко поле деятельности, открывающееся перед автоматическими манипуляторами в самых различных областях производства.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Танковозы типа «900»
Танковозы типа «900» О «900–й» же модели (6x4) с собственным верхнеклапанным 130–сильным двигателем, 4–ступенчатой коробкой передач и всеми односкатными 22–дюймовыми колесами следует рассказать чуть подробнее. Такие машины использовались для перевозки орудий и легких
Робот-интерьер
Робот-интерьер Как часто мы страдаем из-за того, что окружающие не замечают нашего состояния! Да и сами мы его не всегда адекватно оцениваем, а когда спохватываемся, может быть уже поздно. В космическом полете ситуация резко осложняется: организм космонавта — важнейшая
Робот-стеноход
Робот-стеноход …Огонь так разбушевался, что даже видавшие виды бойцы пожарной охраны не рисковали приблизиться к «очагу возгорания» – огромному резервуару с нефтью. Меж тем пламя грозило перекинуться на другие сооружения нефтеперерабатывающего завода. И тут вперед
Робот-«муха»
Робот-«муха» Робот-«муха» может взлететь на высоту 20—30-этажного дома, а затем зависнуть, прилипнув к стенке или потолку. Такую конструкцию предложил и запатентовал старший преподаватель промышленного дизайна механико-машиностроительного факультета
Робот строит дом
Робот строит дом Пожалуй, самые прочные на сегодняшний день дома – кирпичные и бетонные. Однако при сооружении кирпичных стен никак не обойтись без ручного труда. Куда быстрее с помощью механизмов можно построить «коробку» из железобетонных панелей. Но и тут есть своя
Ропот про арбузный робот
Ропот про арбузный робот Одна из наиболее трудоемких работ в сельском хозяйстве – уборка бахчевых культур. Попробуйте-ка потаскать по августовской жаре массивные – весом до 10 кг, а то и более – шары арбузов, эллипсоиды дынь. Тут поневоле задумаешься о механизации…
Глава 7 Передвижной робот с голосовым управлением
Глава 7 Передвижной робот с голосовым управлением Речь является идеальным способом управления и коммуникации в робототехнике. Схема устройства распознавания речи (УРР), которой будет посвящена эта глава, функционирует независимо от основного «интеллекта» роботы (ЦПУ).
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Глава 9 Робот – система телеслежения
Глава 9 Робот – система телеслежения В этой главе мы построим робота – систему телеслежения. Как уже было показано в гл. 2, подобные роботы находят широкое применение в науке, бизнесе, индустрии развлечений, военном деле, различного рода исследованиях и
Шагающий робот с тремя сервомоторами
Шагающий робот с тремя сервомоторами Шагающий робот, которого мы собираемся сделать, является компромиссным решением по замыслу и конструкции и требует наличия всего трех сервомоторов. Однако даже в этом случае он обеспечивает передвижение с помощью треножной походки.
Глава 12 Робот – солнечный шар
Глава 12 Робот – солнечный шар Идею создания подобного робота первоначально выдвинул Ричард Вейт из Северного Йорка, Торонто. Ричард построил робота, ищущего источник света, заключенного в прозрачную сферу (шар). Затем, в более недавнее время, Дейв Хранкиу из Калгари,
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления Данный проект представляет собой многоуровневую модульную задачу. Первый этап проекта – сборка модуля роботизованной руки-манипулятора, поставляемой в виде набора деталей. Вторым
Роботизованная рука-манипулятор
Роботизованная рука-манипулятор Рука-манипулятор (см. рис. 15.1) имеет три степени свободы движения. Локтевое сочленение может перемещаться вертикально вверх-вниз по дуге примерно 135°. Плечевой «сустав» перемещает захват вперед и назад по дуге примерно 120°. Рука может
Вас слушает робот
Вас слушает робот Представьте, что вы звоните по телефону приятелю и вслед за первым гудком в трубке слышите лёгкий щелчок и его голос: «Меня нет дома. Вернусь к восьми. Что вы мне хотите сказать?». Не пытайтесь уличить приятеля во лжи. Он не разыгрывает вас. И хотя слышен
Мыслящий робот
Мыслящий робот Для того чтобы поведение робота было целенаправленным, его «мозг» должен принять на себя функции системы центрального управления: командовать руками, ногами и другими системами, а также контактировать с окружающей средой, следить за её изменениями. Робот