Роботизованная рука-манипулятор
Роботизованная рука-манипулятор
Рука-манипулятор (см. рис. 15.1) имеет три степени свободы движения. Локтевое сочленение может перемещаться вертикально вверх-вниз по дуге примерно 135°. Плечевой «сустав» перемещает захват вперед и назад по дуге примерно 120°. Рука может поворачиваться на основании по часовой стрелке или против часовой стрелки на угол примерно 350°. Захват руки робота может брать и удерживать объекты до 5 см в диаметре и поворачиваться вокруг в кистевом сочленении примерно на 340°.
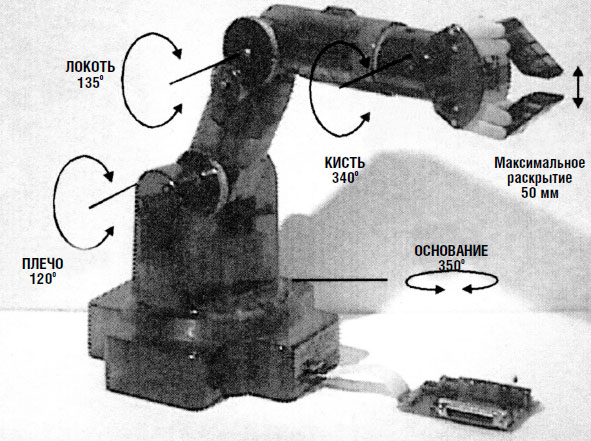
Рис. 15.1. Кинематическая схема движений и поворотов руки-робота
Для приведения руки в движение компания OWI Robotic Arm Trainer использовала пять миниатюрных двигателей постоянного тока. Двигатели обеспечивают управление рукой при помощи проводов. Такое «проводное» управление означает, что каждая функция движения робота (т. е. работа соответствующего двигателя) управляется отдельными проводами (подачей напряжения). Каждый из пяти двигателей постоянного тока управляет своим движением руки-манипулятора. Управление по проводам позволяет сделать блок контроллера руки, непосредственно реагирующий на электрические сигналы. Это упрощает схему интерфейса руки робота, который подключается к порту принтера.
Рука изготовлена из легкого пластика. Большинство деталей, несущих основную нагрузку, также выполнены из пластика. Двигатели постоянного тока, использованные в конструкции руки, представляют собой миниатюрные высокооборотные двигатели с низким крутящим моментом. Для увеличения крутящего момента каждый мотор соединен с редуктором. Двигатели вместе с редукторами установлены внутри конструкции руки-манипулятора. Хотя редуктор увеличивает крутящий момент, рука робота не может поднять или нести достаточно тяжелые предметы. Рекомендуемый максимально допустимый вес при поднятии составляет 130 г.
Набор для изготовления руки робота и его компоненты представлены на рисунках 15.2 и 15.3.

Рис. 15.2. Набор для изготовления руки-робота

Рис. 15.3. Редуктор перед сборкой
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления
Глава 15 Роботизованная рука-манипулятор, интерфейс IBM PC и система голосового управления Данный проект представляет собой многоуровневую модульную задачу. Первый этап проекта – сборка модуля роботизованной руки-манипулятора, поставляемой в виде набора деталей. Вторым
Робот типа «рука»
Робот типа «рука» Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, число рук и пальцев на руке, грузоподъёмность, точность движения и т.д. Независимо от того, стоит ли робот возле станков,