Использование PIC-микроконтроллера и ИС UCN-5804 для управления ШД
Использование PIC-микроконтроллера и ИС UCN-5804 для управления ШД
Мы использовали схему управления работой ШД непосредственно с помощью ИС PIC. Также для управления работой ШД мы использовали специализированную ИС. При совместном использовании специализированной ИС и PIC-микроконтроллера мы можем объединить преимущества, характерные для каждой из схем. ИС UCN-5804 в этом случае выполняет всю «черновую» работу по управлению работой ШД. При некотором усложнении конечной электрической схемы программа управления PIC может быть сильно упрощена, что является хорошим решением.
Принципиальная схема устройства управления ШД с использованием специализированной ИС показана на рис. 10.15, а фотография устройства приведена на рис. 10.16. Питание ИС UCN-5804 осуществляется от источника постоянного тока напряжением 5 В. При напряжении питания 5 В управляющие работой ШД напряжения могут достигать 35 В.
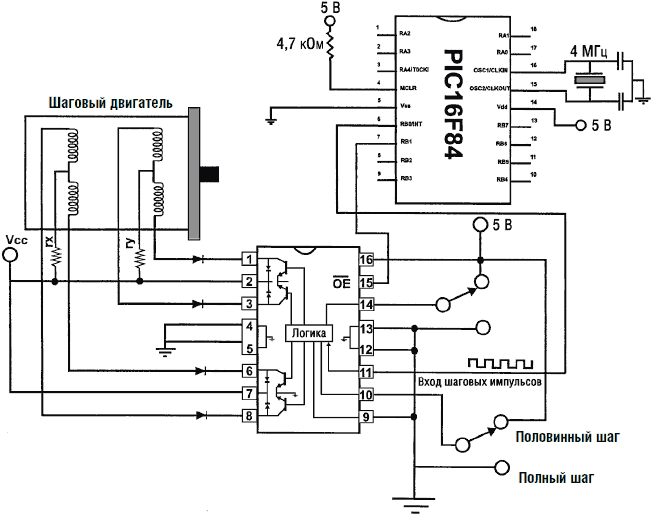
Рис. 10.15. Схема микроконтроллера шагового двигателя
Рис. 10.16. Принципиальная схема микроконтроллера и ИС управления шаговым двигателем
Обратите внимание, что на схеме присутствуют два резистора, обозначенные «rx» и «ry» без указания их номинала. Наличие или отсутствие этих резисторов определяется типом применяемого ШД. Целью введения этих резисторов является ограничение выходного тока, протекающего через ШД, значением 1,25 А (в случае необходимости).
Рассмотрим наш ШД с напряжением питания 5 В. Его обмотки имеют сопротивление 13 Ом. Ток, протекающий через обмотки, составляет 5В/130 м=0,385А, или 385 мА, что значительно ниже максимально разрешенного значения тока 1,25 А для ИС UCN-5804. Поэтому для данного случая резисторы rx и ry не требуются и могут быть исключены из схемы.
Перед тем как мы двинемся дальше, рассмотрим еще один случай. ШД с напряжением питания 12 В имеет сопротивление обмоток 6 Ом. Ток, протекающий через обмотки ШД, составит 12 В/6 Ом=2 А. Такое значение тока превышает максимально допустимое для ИС UCN-5804. Для использование данного ШД резисторы rx и ry необходимы. Для обеспечения одинакового крутящего момента для каждой фазы сопротивления rx и ry должны быть равны. Величины резисторов должны ограничивать ток до величины 1,25 А или ниже. В данном случае сопротивление резисторов должно быть не менее 4 Ом (при мощности от 5 до 10 Вт). При включении резисторов значение тока составит 12 В/10 Ом = 1,20 А.
Уровни входов ИС UCN-5804 совместимы с выходами КМОП– и ТТЛ-логики. Это означает, что для нормальной работы схемы мы можем непосредственно соединить входы ИС с шинами выхода PIC-микроконтроллера. Входные тактовые импульсы (вывод 11) для ИС UCN-5804 генерируются PIC-микроконтроллером. Вывод управления выходом разрешает вращение ШД при подаче сигнала низкого уровня и останавливает ШД при сигнале высокого уровня.
Выводы 10 и 14 ИС UCN-5804 управляются переключателями, подающими сигналы высокого или низкого уровня. Вывод 10 управляет режимами полного или половинного шага, а вывод 14 управляет направлением вращения. При желании этими функциями можно управлять с помощью PIC. Для управления на соответствующие выводы подаются сигналы высокого или низкого уровня аналогично управлению работой выхода ИС.
Программа на PICBASIC для обеспечения работы схемы имеет следующий вид:
‘Управление шаговым двигателем через ИС UCN?5804
Symbol TRISB = 134 ‘Инициализировать TRISB как 134
Symbol PortB = 6 ‘Инициализировать PortB как 6
Poke TRISB,0 ‘Установить шины PORTB на выход
low1 ‘Установить выход на низкий уровень
start:
pulsout 0, 10000 ‘Подача 10 мс импульсов на UCN?5804
goto start ‘Повторение
В этом случае я снова написал простейшую «базовую» программу, чтобы показать, насколько просто осуществляется управление вращением ШД. Конечно, вы можете дополнить программу управлением частотой импульсов, направлением вращения и т. д.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Причины использования микроконтроллера
Причины использования микроконтроллера Способность микроконтроллера к хранению и выполнению уникальной (заданной пользователем) программы обусловливает гибкость его применения. Например, можно запрограммировать микроконтроллер на принятие решений (исполнение
Подробности программирования PIC микроконтроллера
Подробности программирования PIC микроконтроллера Программирование PIC микроконтроллера происходит в три этапа. Однако прежде чем приступить к собственно программированию, вам необходимо приобрести две вещи: программу компилятор PICBASIC и программатор EPIC (плата, куда
Проверка PIC микроконтроллера
Проверка PIC микроконтроллера На приведенной схеме видно, что для обеспечения работы микроконтроллера требуется очень небольшое количество дополнительных деталей. Прежде всего необходим резистор смещения, присоединенный к выводу 4 (MCLR), кварцевый резонатор на частоту 4
Движемся дальше – приложения использования микроконтроллера
Движемся дальше – приложения использования микроконтроллера Сейчас настало время продемонстрировать вам, как используются микроконтроллеры в различных схемах. Вы уже обладаете начальным опытом программирования микроконтроллера 15F84. В этой главе приведены некоторые
Список необходимых частей для программирования микроконтроллера
Список необходимых частей для программирования микроконтроллера • компилятор PSIBASIC• компилятор PSIBASIC Pro (включая CodeDesignerLit)• программатор EPIC• компилятор PICBASIC и программатор EPIC• CodeDesigner любительская версия• CodeDesigner стандартная версия• 16F84-4 1 шт.• кварцевый резонатор
ИС UCN-5804
ИС UCN-5804 На рис. 10.7 изображена цоколевка ИС UCN-5804. ИС предназначена для управления и запитки четырехфазного однополярного шагового двигателя, который мы будем использовать в нашей конструкции. ИС UCN-5804 имеет следующие параметры:• Максимальный выходной ток в непрерывном
Применение ИС UCN-5804
Применение ИС UCN-5804 На рис. 10.8 изображена схема управления ШД с использованием ИС UCN-5804. Тактовые импульсы вырабатываются с помощью таймера ИС 555. Частота тактовых импульсов может быть увеличена или уменьшена с помощью переменного резистора V1. Изменение частоты тактовых
Использование микроконтроллера для управления ШД
Использование микроконтроллера для управления ШД Для изучения принципов работы ШД изготовим схему управления ШД с помощью микроконтроллера PIC
Программа для микроконтроллера
Программа для микроконтроллера Микроконтроллер 16F84 управляет работой трех сервомоторов. Наличие большого числа незадействованных шин ввода/вывода и места под программу предоставляет возможность совершенствования и модификации базовой модели
8. Использование энергии
8. Использование энергии Некоторые положения в области тепловой работы печей могут быть получены непосредственно из классической термодинамики обратимых процессов.Под тепловой работой печи понимается совокупность происходящих в ней тепловых процессов, конечной целью
8.2.4.3.8 Использование клавиатуры
8.2.4.3.8 Использование клавиатуры Должны быть определены правила использования специальных клавиш в диалоговой документации.Примечания1 Пользователь должен иметь возможность вызова справки, используя конкретную клавишу или комбинацию клавиш, в любой точке программы.
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ Работы по созданию автоматизированных систем управления технологическими процессами (АСУ ТП) электроэнергетических объектов были начаты с появлением
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1). Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 –
13.1 Использование ранее разработанного ПО
13.1 Использование ранее разработанного ПО В последующих подразделах рассмотрены вопросы, связанные с использованием ранее разработанного ПО, включая оценку модификаций, изменение объекта среды приложения или среды разработки, обновление базовой линии разработки и