Конструкция тяги
Конструкция тяги
Тяга между передними и задними ногами изготовлена из прутка с резьбой 3 мм (см. рис. 11.10). В исходной конструкции длина тяги составляет 132 мм от центра до центра. Тяга вставляется в отверстия на передней и задней ноге робота и может быть закреплена с помощью нескольких гаек.
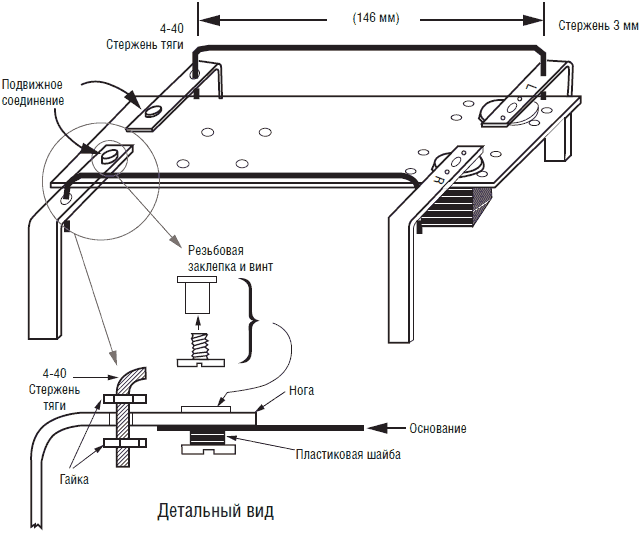
Рис. 11.10. Детальный чертеж шарнира и тяги
Перед установкой тяги задние ноги робота должны быть прикреплены к основанию. Крепление задних ног изготовлено из резьбовой заклепки 9,5 мм и крепежного винта. Детальное крепление ноги показано на рис. 11.10. Необходимо подложить пластиковые шайбы под основание, которые заполнят пространство между нижней частью основания и головкой винта. Такая конструкция обеспечивает крепление ноги к основанию без ее «болтания». Чтобы уменьшить трение, можно использовать пластиковые шайбы. Не используйте слишком много шайб – это приведет к излишнему прижиму ноги к поверхности основания. Нога должна поворачиваться в соединении достаточно свободно. На рис. 11.11 и 11.12 приведены фотографии частично собранного шестиногого робота.
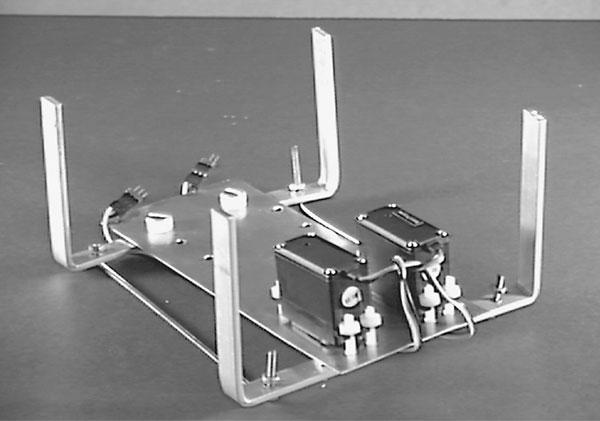
Рис. 11.11. Шестиног – вид снизу. Спереди два сервомотора
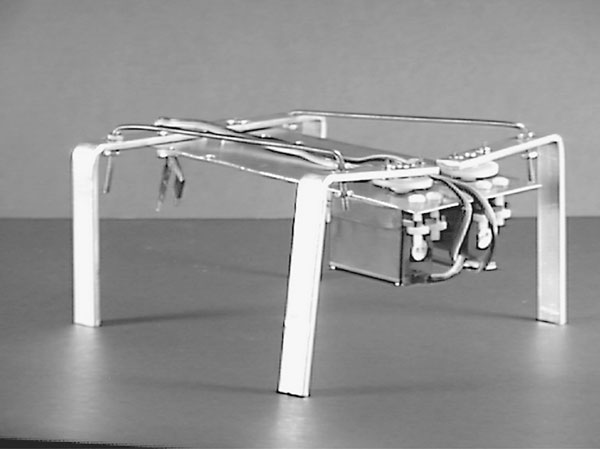
Рис. 11.12. Частично собранный шестиног с двумя передними сервомоторами
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Глава 19 ПРОБЛЕМА ТЯГИ
Глава 19 ПРОБЛЕМА ТЯГИ Дальние межпланетные экспедиции и проблема тяги Общеизвестно, что на сегодняшний день основой космической экспансии человечества по-прежнему являются ракеты на жидком топливе. Однако имеющиеся в наличии и перспективные ракеты на жидком топливе, к
Дальние межпланетные экспедиции и проблема тяги
Дальние межпланетные экспедиции и проблема тяги Общеизвестно, что на сегодняшний день основой космической экспансии человечества по-прежнему являются ракеты на жидком топливе. Однако имеющиеся в наличии и перспективные ракеты на жидком топливе, к сожалению, не
Конструкция эсминца проекта 31
Конструкция эсминца проекта 31 Корпус корабля – цельносварной (за исключением клёпаного соединения верхней палубы с бортом, обделочных уголков надстройки и съёмных конструкций накладных листов), выполнен из стали марки СХЛ (холоднолегированная), система набора –
Конструкция
Конструкция Конструирование робота начинается с поиска подходящего шасси от радиоуправляемого автомобиля. Большинство моделей радиоуправляемых автомобилей имеют внешний декоративный корпус, который придает им вид настоящего автомобиля, грузовика, вездехода и т. д.
Конструкция робота
Конструкция робота За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование
Конструкция редуктора
Конструкция редуктора Перед тем как мы приступим к изготовлению робота, давайте посмотрим на конструкцию редуктора (см. рис. 12.3). Физические размеры редуктора меньше обычных и его легче смонтировать внутри сферы. Передаточное число редуктора 1000:1. Чем больше передаточное
Конструкция робота
Конструкция робота Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин
Конструкция дирижабля
Конструкция дирижабля Конструкция дирижабля проста и не требует особых замечаний. Основной проблемой является надежность сварного шва. Для практики отрежьте от листа материала Mylar небольшую полоску. Согните полоску Mylar блестящей стороной наружу, а темной стороной
Конструкция интерфейса для PC
Конструкция интерфейса для PC Схема PC интерфейса приведена на рис. 15.5. В набор деталей PC интерфейса входит печатная плата, расположение деталей на которой показано на рис. 15.6. Рис. 15.5. Принципиальная схема интерфейса РС Рис. 15.6. Схема расположения деталей РС
КОНСТРУКЦИЯ ТАНКА Т-80Б
КОНСТРУКЦИЯ ТАНКА Т-80Б Танк Т-80Б унаследовал компоновку своих известных предшественников, в том числе и Т-64, с отделением управления в передней части корпуса. Здесь размещены сиденье механика-водителя, перед которым на днище находятся рычаги управления поворотом, педали
2.3 конструкция
2.3 конструкция Конструкция современных веревок - кабельного типа. Впервые ее применила фирма "Edelrid" в 1953 г. Такая веревка имеет несущую сердцевину и защитную оплетку (рис. 7).Сердцевина состоит из нескольких десятков тысяч синтетических нитей. Они распределены в два, три или
3.2. Конструкция блока питания
3.2. Конструкция блока питания В состав блока питания для системного модуля персонального компьютера входят: металлический корпус, печатная плата с установленными на ней компонентами электронной схемы, вентилятор, два трехконтактных разъема для подключения к первичной
Контур компенсации эксцентриситета вектора тяги
Контур компенсации эксцентриситета вектора тяги Влияние контура компенсации эксцентриситета вектора тяги на характеристики разомкнутой цепи ЦАП по конструктивным соображениям ограничивается областью ниже 2 рад/сек. Это значительно ниже частоты квантования
Закон управления направлением вектора тяги
Закон управления направлением вектора тяги При проектировании управления карданом ЖРД для изменения направления вектора тяги посадочной ступени лунного корабля предусматривалось использование этого управления для совмещения вектора тяги с центром масс аппарата и
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉