Конструкция робота
Конструкция робота
Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин прозрачные сферы продаются во многих магазинах, специализирующихся на товарах для любителей. Подобные сферы используются любителями для размещения в них различных поделок «выходного дня». Если вы не сможете приобрести такую сферу в местном магазине, то можете заказать ее в Images SI (см. список деталей конструкции в конце главы). Пластиковый корпус является хрупким. Не заставляйте вашего робота подниматься или спускаться по ступеням, корпус может разбиться, что приведет конструкцию в негодность.
Разделите две половины корпуса. Сперва необходимо точно определить геометрический центр каждой полусферы. В этих точках будут присоединяться концы вала редуктора. Определение положения точки центра может показаться более легким, чем это есть на самом деле. Для отыскания центра я был вынужден нарисовать на бумаге окружность по периметру полусферы, затем нарисовать квадрат вокруг окружности со сторонами, касающимися окружности (см. рис. 12.4). Проведя диагонали квадрата, я нашел геометрический центр окружности. Затем полусфера была помещена на рисунок окружности. Если вы держите голову прямо напротив сферы, вы сможете визуально определить центр и отметить его на сфере с помощью маркера. Я попробовал этот способ раз или два, но результаты были неудовлетворительны. В конце концов, я наклеил бумагу на фанеру толщиной 1,5 мм и просверлил небольшое отверстие в отмеченном центре. Затем я взял небольшой штырь длиной 63 мм и зафиксировал его в отверстии, следя за тем, чтобы он был перпендикулярен плоскости. Возьмите полусферу за обод и совместите ее диаметр с нарисованной окружностью. Конец штыря укажет положение центра с большой точностью. Отметьте положение центра сперва на одной полусфере, а затем – на второй.
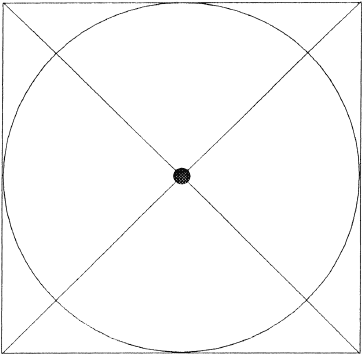
Рис. 12.4. Чертеж для нахождения центра окружности
Следующим шагом будет изготовление запорного устройства фиксатора внутри сферы, которое будет препятствовать свободному вращению вала редуктора внутри сферы. Поскольку вал зафиксирован, то это приводит к вращению самого редуктора внутри сферы. При этом центр тяжести перемещается, и робот двигается вперед. В то же время конструкция фиксатора вала редуктора должна обеспечивать по необходимости разъем и соединение половин сферы. Система, которую я использую, иллюстрирована рис. 12.5 и 12.6. Для этой цели мной был использован тот же тип прозрачного пластика, из которого сделана сфера, а вы можете изготовить эти части из других материалов, например из латуни или дерева.
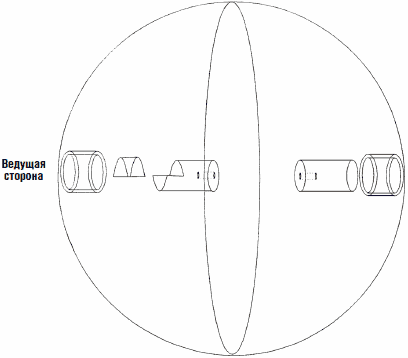
Рис. 12.5. Детали привода прозрачной сферы
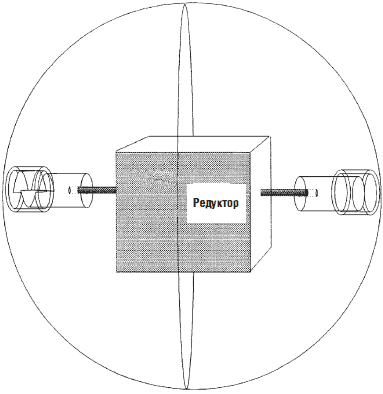
Рис. 12.6. Положение редуктора внутри сферы
Первая деталь представляет собой небольшой отрезок трубки с внешним диаметром 15 мм, внутренним диаметром 12 мм и длиной 9,5 мм. Эта трубка приклеивается к центру полусферы в отмеченной нами ранее точке.
Внутрь трубки вклеивается половина разрезанного вдоль стержня диаметром 12 мм и длиной 9,5 мм. Эта часть может быть вклеена в трубку перед приклеиванием трубки к поверхности полусферы.
Затем отрежьте небольшой кусочек стержня из жесткого пластика диаметром 12 мм. Распилите его вдоль по длине 9,5 мм и удалите половину. Это можно сделать при помощи ножовки или шлицовки. Сперва пропилите щель на глубину 9,5 мм, а затем сделайте горизонтальный пропил для удаления одной половины. Проверьте, что стержень заходит на всю глубину в трубку 15 мм и надежно соединяется с внутренней поверхностью полусферы. Если этого не происходит, подпилите полукруглый конец стержня. В другом конце стержня просверлите по центру отверстие, соответствующее диаметру вала редуктора.
Примечание. В первоначальном варианте конструкции я сделал крепление вала редуктора к полусфере аналогичным образом. Только когда конструкция была завершена, я понял, что это делать необязательно. Разъемного сочленения с одной стороны оказалось достаточно.
Конструкция крепления ко второй полусфере проще по изготовлению. Приклейте небольшой отрезок трубки с внешним диаметром 15 мм и внутренним диаметром 12 мм к центру полусферы, используя нанесенную отметку. Отрежьте небольшой кусок стержня диаметром 12 мм. Убедитесь, что стержень легко вставляется в трубку 15 мм. Если нет, то возьмите небольшой кусок наждачной бумаги средней зернистости. Оберните наждачную бумагу на расстоянии 12 мм от конца стержня. Зачистите конец стержня, вращая его в кольце наждачной бумаги. Продолжайте зачищать стержень до тех пор, пока он не будет легко входить с отверстие трубки. Затем просверлите в другом конце стержня отверстие, соответствующее диаметру вала редуктора.
Необходимо, чтобы редуктор располагался точно в центре сферы. Вставьте конец вала редуктора в отверстие в пластиковом стержне. Вставьте стержень в трубку, прикрепленную к внутренней поверхности полусферы нашего шара.
Добейтесь центрального положения редуктора и отметьте глубину, на которую вал редуктора входит в пластиковый стержень. Выньте редуктор из отверстия в стержне. Приготовьте небольшое количество эпоксидного клея. Нанесите эпоксидный клей на вал редуктора и вставьте его в отверстие стержня. Перед тем как продолжить, дождитесь высыхания клея.
Как только клей высохнет, мы должны вклеить второй пластиковый стержень с противоположной стороны. Вставьте приклеенный стержень в полусферу. В противоположный конец вала вставьте другой пластиковый стержень. Соедините половины сферы в первый раз. Заметьте глубину, на которую вал редуктора войдет в пластиковый стержень, и добавьте 3 мм для компенсации возможной ошибки. Приклейте и дайте клею подсохнуть. Во время склейки второго конца вала редуктора убедитесь, что половины сферы смыкаются нужным образом.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Изготовление робота-тестера
Изготовление робота-тестера Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47). Рис. 5.47. ТестерПринципиальная схема робота-тестера изображена на
Усовершенствование робота-тестера
Усовершенствование робота-тестера Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Список компонентов для робота-черепахи Вальтера
Список компонентов для робота-черепахи Вальтера • (1) 300x300 мм лист металла толщиной 0,4–0,6 мм• (1) 3х 12х 300 мм алюминиевая полоса• (1) сервомотор с крутящим моментом 1,3 кгс• (1) двигатель с редуктором 1:100• винты и гайки 3 мм• винты и гайки 2 мм• (1) 3х 12х 810 мм алюминиевая
Строим робота-охотника за светом
Строим робота-охотника за светом Посмотрим, сможем ли мы сконструировать робота-охотника за светом, обладающего в некотором смысле «интеллектуальным» поведением. В главе 6 мы уже рассматривали систему слежения за источником света на фоторезисторах. Система слежения
Конструкция
Конструкция Конструирование робота начинается с поиска подходящего шасси от радиоуправляемого автомобиля. Большинство моделей радиоуправляемых автомобилей имеют внешний декоративный корпус, который придает им вид настоящего автомобиля, грузовика, вездехода и т. д.
Список деталей робота – устройства телеслежения
Список деталей робота – устройства телеслежения • (1) Миниатюрная цветная видеокамера с приемником и передатчиком диапазона 2,4 ГГц• (1) Дополнительный батарейный отсек• (1) Система пропорционального радиоуправления (приемник/передатчик – два канала, кварцевые
Создание шагающего робота
Создание шагающего робота Существует много моделей небольших заводных шагающих игрушек. Такие игрушечные «пешеходы» передвигают ногами вверх-вниз и вперед-назад с помощью кулачковых механизмов. Хотя такие конструкции вполне способны «шагать», а некоторые делают это
Конструкция робота
Конструкция робота За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование
Список деталей конструкции шагающего робота
Список деталей конструкции шагающего робота • Сервомоторы• Микроконтроллеры 16F84• Алюминиевые полосы• Алюминиевый лист• Прутки и гайки с резьбой 3 мм• Пластиковые винты, гайки и шайбыДетали можно заказать в:Images Company39 Seneca LoopStaten Island, NY 10314(718)
Список деталей для изготовления робота-солнечного шара
Список деталей для изготовления робота-солнечного шара • (1) Прозрачная пластиковая сфера 140 мм (см. выше текст настоящей главы).• (1) Редуктор (см. выше текст настоящей главы)• (1) Стержень из твердого пластика длиной 150 мм диаметром 12 мм• (1) Пластиковая трубка длиной 75 мм,
Список деталей для робота-рыбы
Список деталей для робота-рыбы • R1 33 кОм• R2 и R6 100 Ом• R3 470 Ом• R5 10 кОм• R7 15 кОм• Q2 транзистор NPN 2N2222• Q3 TIP 120 NPN Darlington• IC1 таймер 555• C1 и C2 22 мкФ• С3 0,01 мкФ• Кольцевой соленоид $5,95• Q1 2N2646 UJT $5,95• Алюминиевая полоса 3х12х150 мм• Алюминиевая полоса 3х30х50 ммДетали можно заказать
Обучение робота
Обучение робота Робот действует по программе. Вначале изучают траекторию движения руки робота, затем «обучают» его самого и составляют программу самостоятельной работы. Кратко рассмотрим этапы обучения.Перемещения, которые должна совершить рука робота, фиксируют при
Внутренний мир робота
Внутренний мир робота Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней
2.3 конструкция
2.3 конструкция Конструкция современных веревок - кабельного типа. Впервые ее применила фирма "Edelrid" в 1953 г. Такая веревка имеет несущую сердцевину и защитную оплетку (рис. 7).Сердцевина состоит из нескольких десятков тысяч синтетических нитей. Они распределены в два, три или