Строим робота-охотника за светом
Строим робота-охотника за светом
Посмотрим, сможем ли мы сконструировать робота-охотника за светом, обладающего в некотором смысле «интеллектуальным» поведением. В главе 6 мы уже рассматривали систему слежения за источником света на фоторезисторах. Система слежения фиксировала источник света и поворачивалась в его направлении. Когда мы поместили следящую систему на копию робота-черепахи Вальтера, она направляла движение робота на источник света. Такой тип «ориентировочного» поведения мы будем называть первым уровнем системы «стимул-реакция».
Программа иллюстрирует, как алгоритмически управляемые микроконтроллеры могут имитировать функции нейронов. Для строгости примера приведем нейронную схему, которая исполняет те же функции без участия алгоритмически заданного «интеллекта».
На рис. 8.19 показано использование двойного симметричного операционного усилителя с однополярным питанием. Два ОУ включены в схемы компараторов. Работу компаратора мы подробно рассматривали в гл. 5. Если у вас возникли какие либо вопросы по поводу рис. 8.19, перечитайте гл. 5. Два фоторезистора CdS включены последовательно и образуют делитель напряжения. Выход этого фоторезистивного делителя подключен к инвертированному входу одного ОУ и неинвертированному входу другого.
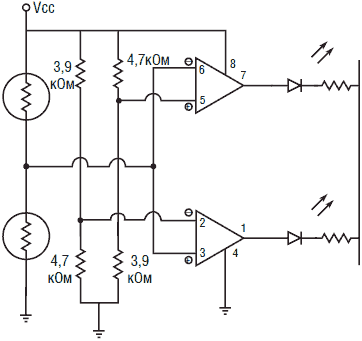
Рис. 8.19. Нейронный компаратор на двух ОУ
Потребуются еще два делителя напряжения. Конструктивно они являются зеркально симметричными. Один делитель составляют резистор 3,9 кОм, подключенный к ИП, и резистор 4,7 кОм, соединенный с землей. Во втором делителе используются резисторы тех же номиналов, но в обратном включении.
Когда оба фоторезистора освещены одинаково, то ни один из светодиодов не горит. Если прикрыть один из фоторезисторов, то соответствующий светодиод загорится.
Каждый из ОУ функционирует как одиночный электронный нейрон. Когда значение электрического стимула превышает или падает ниже заданного порога (зависит от того, какой из ОУ мы рассматриваем), который определяется соответствующим резистивным делителем 3,9 кОм и 4,7 кОм, то «нейрон» активируется. Активация нейрона (т. е. сигнал на выходе ОУ) может быть использована для включения двигателя постоянного тока через NPN транзистор (см. рис. 8.20). В свою очередь двигатели могут обеспечивать перемещение и направление движения робота охотника.
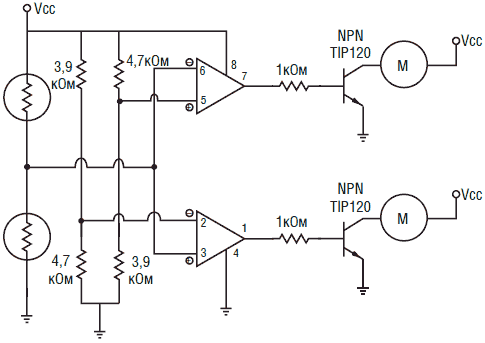
Рис. 8.20. Управление двигателями постоянного тока с помощью нейронного компаратора
Для изготовления простого робота-охотника было использовано шасси, имеющее два двигателя постоянного тока с редукторами (см. рис. 8.21). Когда оба двигателя включены, робот движется вперед по прямой. Если один из двигателей выключен, то другой двигатель поворачивает конструкцию направо или налево.
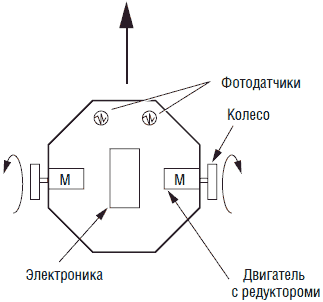
Рис. 8.21. Общая схема робота – светоохотника
Для нашего робота-охотника при одинаковом освещении фоторезисторов нам необходимо подавать питание на оба двигателя. Для этого между выходом каждого из ОУ и базой NPN транзистора необходимо включить инвертирующий буферный каскад (см. рис. 8.22).
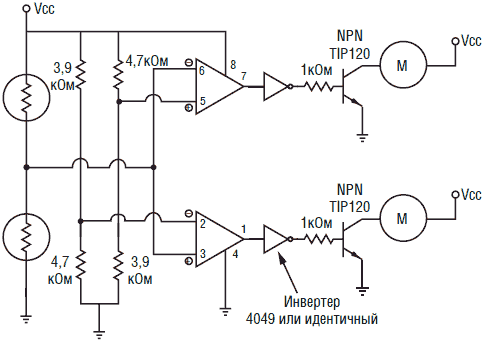
Рис. 8.22. Управление двигателями постоянного тока с помощью нейронных компараторов с инверторами
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Строим солнечный двигатель
Строим солнечный двигатель Солнечный двигатель часто используется в качестве бортового источника тока, применяемого в BEAM-роботах, которых часто называют «живущими» роботами (см. обсуждение BEAM-роботов в главе 8). Свое распространение солнечные двигатели получили
Изготовление робота-тестера
Изготовление робота-тестера Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47). Рис. 5.47. ТестерПринципиальная схема робота-тестера изображена на
Усовершенствование робота-тестера
Усовершенствование робота-тестера Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Строим черепаху Вальтера
Строим черепаху Вальтера Мы можем воспроизвести большинство функций знаменитой черепахи Вальтера. Используемая нами программа имитирует работу нейронов, использованных в оригинальной конструкции. Для изготовления шасси потребуются некоторые слесарные работы.
Список компонентов для робота-черепахи Вальтера
Список компонентов для робота-черепахи Вальтера • (1) 300x300 мм лист металла толщиной 0,4–0,6 мм• (1) 3х 12х 300 мм алюминиевая полоса• (1) сервомотор с крутящим моментом 1,3 кгс• (1) двигатель с редуктором 1:100• винты и гайки 3 мм• винты и гайки 2 мм• (1) 3х 12х 810 мм алюминиевая
Список деталей робота – устройства телеслежения
Список деталей робота – устройства телеслежения • (1) Миниатюрная цветная видеокамера с приемником и передатчиком диапазона 2,4 ГГц• (1) Дополнительный батарейный отсек• (1) Система пропорционального радиоуправления (приемник/передатчик – два канала, кварцевые
Создание шагающего робота
Создание шагающего робота Существует много моделей небольших заводных шагающих игрушек. Такие игрушечные «пешеходы» передвигают ногами вверх-вниз и вперед-назад с помощью кулачковых механизмов. Хотя такие конструкции вполне способны «шагать», а некоторые делают это
Конструкция робота
Конструкция робота За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование
Список деталей конструкции шагающего робота
Список деталей конструкции шагающего робота • Сервомоторы• Микроконтроллеры 16F84• Алюминиевые полосы• Алюминиевый лист• Прутки и гайки с резьбой 3 мм• Пластиковые винты, гайки и шайбыДетали можно заказать в:Images Company39 Seneca LoopStaten Island, NY 10314(718)
Конструкция робота
Конструкция робота Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин
Список деталей для изготовления робота-солнечного шара
Список деталей для изготовления робота-солнечного шара • (1) Прозрачная пластиковая сфера 140 мм (см. выше текст настоящей главы).• (1) Редуктор (см. выше текст настоящей главы)• (1) Стержень из твердого пластика длиной 150 мм диаметром 12 мм• (1) Пластиковая трубка длиной 75 мм,
Список деталей для робота-рыбы
Список деталей для робота-рыбы • R1 33 кОм• R2 и R6 100 Ом• R3 470 Ом• R5 10 кОм• R7 15 кОм• Q2 транзистор NPN 2N2222• Q3 TIP 120 NPN Darlington• IC1 таймер 555• C1 и C2 22 мкФ• С3 0,01 мкФ• Кольцевой соленоид $5,95• Q1 2N2646 UJT $5,95• Алюминиевая полоса 3х12х150 мм• Алюминиевая полоса 3х30х50 ммДетали можно заказать
Обучение робота
Обучение робота Робот действует по программе. Вначале изучают траекторию движения руки робота, затем «обучают» его самого и составляют программу самостоятельной работы. Кратко рассмотрим этапы обучения.Перемещения, которые должна совершить рука робота, фиксируют при
Внутренний мир робота
Внутренний мир робота Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней