Конструкция робота
Конструкция робота
За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование обеспечит точность положения отверстий под крепления сервомоторов. Четыре отверстия диаметром 4,3 мм расположены немного позади средней линии и предназначены для крепления центрального сервомотора. Эти четыре отверстия смещены к правому краю. Это необходимо сделать для того, чтобы фланец центрального сервомотора находился точно по центру «тела». Два задних отверстия предназначены для подвижного крепления задних ног.
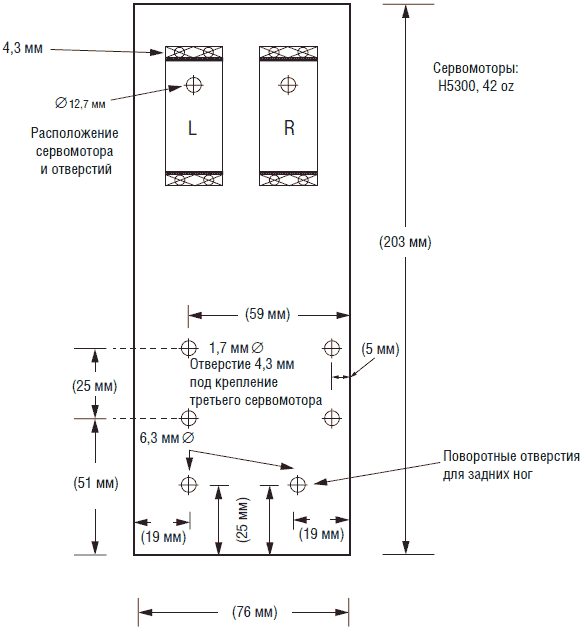
Рис. 11.7. Основание «тела»
Для разметки центров отверстий под сверление необходимо использовать кернер. В противном случае при сверлении отверстий сверло может «увести». Если у вас нет кернера, вы можете использовать в качестве неплохой замены острый гвоздь.
Ноги робота изготовлены из алюминиевой полосы шириной 12 мм и толщиной 3 мм (см. рис. 11.8). В передних ногах просверливается по четыре отверстия. В задних ногах сверлятся два отверстия: одно для подвижного крепления, а другое – для крепления тяги. Обратите внимание, что задние ноги на 6 мм короче передних. Это объясняется тем, что необходимо учитывать высоту фланца сервомотора, к которому крепятся передние ноги, над общим уровнем пластины. Укорочение задних ног выравнивает положение платформы.
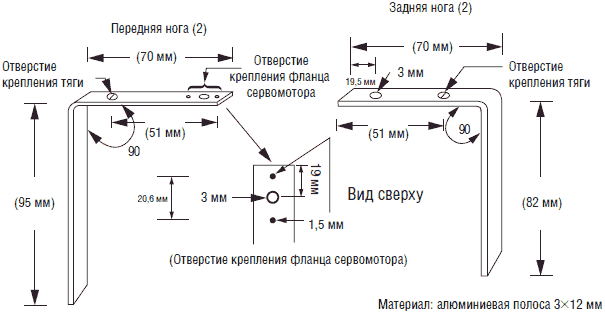
Рис. 11.8. Конструкция передних и задних ног
После сверления необходимых отверстий необходимо согнуть алюминиевую полосу по нужной форме. Зажмите полосу в тиски со стороны высверленных отверстий на расстоянии 70 мм. Нажмите на пластину и согните ее под углом 90°. Лучше всего нажимать на пластину непосредственно около губок тисков. При этом пластина согнется под углом 90° без риска выгибания самой «нижней» части ноги.
Центральные ноги выполнены из одного куска алюминия (см. рис. 11.9). При креплении к роботу центральные ноги оказываются на 3 мм короче передних и задних ног. Таким образом, в среднем положении они не касаются земли. Эти ноги предназначены для наклона робота вправо и влево. При вращении центрального сервомотора ноги наклоняют робота на угол примерно ±20°.
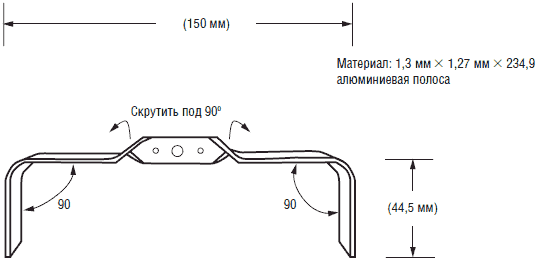
Рис. 11.9. Средние ноги
При изготовлении центральных ног в алюминиевой полосе размером 3х12х235 мм сверлятся сперва три центральных отверстия под фланец сервомотора. Затем алюминиевая полоса крепится в тиски, причем губки тисков по верхнему краю должны фиксировать полосу на расстоянии 20 мм от центра полосы. Зажмите полосу с помощью плоскогубцев на расстоянии примерно 12 мм от верхнего края тисков. Сохраняя зажим плоскогубцев, аккуратно скрутите алюминиевую полосу на угол 90°. Производите операцию достаточно медленно, иначе можно легко сломать пластину. Аналогично скрутите пластину с другой стороны.
После того как скручивание на 90° произведено, дополнительно согните пластину в двух местах на 90°, как мы это делали для передних и задних ног.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Изготовление робота-тестера
Изготовление робота-тестера Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47). Рис. 5.47. ТестерПринципиальная схема робота-тестера изображена на
Усовершенствование робота-тестера
Усовершенствование робота-тестера Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Список компонентов для робота-черепахи Вальтера
Список компонентов для робота-черепахи Вальтера • (1) 300x300 мм лист металла толщиной 0,4–0,6 мм• (1) 3х 12х 300 мм алюминиевая полоса• (1) сервомотор с крутящим моментом 1,3 кгс• (1) двигатель с редуктором 1:100• винты и гайки 3 мм• винты и гайки 2 мм• (1) 3х 12х 810 мм алюминиевая
Строим робота-охотника за светом
Строим робота-охотника за светом Посмотрим, сможем ли мы сконструировать робота-охотника за светом, обладающего в некотором смысле «интеллектуальным» поведением. В главе 6 мы уже рассматривали систему слежения за источником света на фоторезисторах. Система слежения
Конструкция
Конструкция Конструирование робота начинается с поиска подходящего шасси от радиоуправляемого автомобиля. Большинство моделей радиоуправляемых автомобилей имеют внешний декоративный корпус, который придает им вид настоящего автомобиля, грузовика, вездехода и т. д.
Список деталей робота – устройства телеслежения
Список деталей робота – устройства телеслежения • (1) Миниатюрная цветная видеокамера с приемником и передатчиком диапазона 2,4 ГГц• (1) Дополнительный батарейный отсек• (1) Система пропорционального радиоуправления (приемник/передатчик – два канала, кварцевые
Создание шагающего робота
Создание шагающего робота Существует много моделей небольших заводных шагающих игрушек. Такие игрушечные «пешеходы» передвигают ногами вверх-вниз и вперед-назад с помощью кулачковых механизмов. Хотя такие конструкции вполне способны «шагать», а некоторые делают это
Конструкция робота
Конструкция робота За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование
Список деталей конструкции шагающего робота
Список деталей конструкции шагающего робота • Сервомоторы• Микроконтроллеры 16F84• Алюминиевые полосы• Алюминиевый лист• Прутки и гайки с резьбой 3 мм• Пластиковые винты, гайки и шайбыДетали можно заказать в:Images Company39 Seneca LoopStaten Island, NY 10314(718)
Список деталей для изготовления робота-солнечного шара
Список деталей для изготовления робота-солнечного шара • (1) Прозрачная пластиковая сфера 140 мм (см. выше текст настоящей главы).• (1) Редуктор (см. выше текст настоящей главы)• (1) Стержень из твердого пластика длиной 150 мм диаметром 12 мм• (1) Пластиковая трубка длиной 75 мм,
Список деталей для робота-рыбы
Список деталей для робота-рыбы • R1 33 кОм• R2 и R6 100 Ом• R3 470 Ом• R5 10 кОм• R7 15 кОм• Q2 транзистор NPN 2N2222• Q3 TIP 120 NPN Darlington• IC1 таймер 555• C1 и C2 22 мкФ• С3 0,01 мкФ• Кольцевой соленоид $5,95• Q1 2N2646 UJT $5,95• Алюминиевая полоса 3х12х150 мм• Алюминиевая полоса 3х30х50 ммДетали можно заказать
Обучение робота
Обучение робота Робот действует по программе. Вначале изучают траекторию движения руки робота, затем «обучают» его самого и составляют программу самостоятельной работы. Кратко рассмотрим этапы обучения.Перемещения, которые должна совершить рука робота, фиксируют при
Внутренний мир робота
Внутренний мир робота Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней
2.3 конструкция
2.3 конструкция Конструкция современных веревок - кабельного типа. Впервые ее применила фирма "Edelrid" в 1953 г. Такая веревка имеет несущую сердцевину и защитную оплетку (рис. 7).Сердцевина состоит из нескольких десятков тысяч синтетических нитей. Они распределены в два, три или