Глава 5 ЧТО ДАЛЬШЕ?
С этого момента в изучении электроники мы можем продвигаться по многочисленному количеству направлений. Вот некоторые возможности:
• Аудиоэлектроника.
Эта область электроники включает в себя любительские проекты, например простые усилители и «stomp boxes» (педали) для управления звуком гитары.
• Радиочастотные устройства.
Любое устройство, которое в состоянии принимать или передавать радиочастотные волны — от очень простых радиоприемников в АМ-диапазоне до контроллеров дистанционного управления.
• Двигатели.
Область робототехники обеспечивает рост большого количества сайтов в Интернете, которые предлагают шаговые двигатели, двигатели с редукторами, синхронные двигатели, серводвигатели и многое другое.
• Программируемые микроконтроллеры.
Это очень маленькие вычислительные устройства, которые «упакованы» в одну-единственную микросхему. С помощью вашего настольного компьютера вы можете написать небольшую программу, «задающую» вашему микроконтроллеру выполнение серии процедур, к которым могут относиться входные данные датчика, ожидание в течение фиксированного периода времени и передачу выходного сигнала на двигатель. Затем вы загружаете вашу программу в микроконтроллер, который сохраняет ее в энергонезависимой памяти. К популярным производителям контроллеров относятся PICAXE, BASIC Stamp, Arduino и многие другие компании. Самый дешевый в розничной продаже предлагается по цене порядка $5.
Очевидно, что у меня нет места для освещения всех этих тем полностью, поэтому я собираюсь представить вам их использование для описания только одного или двух проектов в каждой приведенной категории. Вы можете решить, который из этих проектов для вас наиболее интересен, а затем изучить только те части книги, которые отвечают этому интересу.
Я также собираюсь высказать некоторые предложения по организации вашей рабочей зоны, читая необходимые книги, каталоги и другие ресурсы печатной продукции, а также те, которые относятся к любительской электронике.
СПИСОК НЕОБХОДИМЫХ ПОКУПОК ДЛЯ ЭКСПЕРИМЕНТОВ С 25 ПО 36
Приборы
Для этой главы книги вам не понадобится каких-либо новых приборов.
Предметы поставки и компоненты
Поскольку мы подошли к моменту, когда вы можете захотеть подобрать и выбрать те или иные проекты, которые вы захотите попытаться воплотить, то я в начале каждого эксперимента привел список необходимых материалов и компонентов.
Организация вашего рабочего места
Если вы заинтересованы в получении удовольствия при создании аппаратного обеспечения, но вы еще не определились с расположением рабочего места для вашего нового хобби, то у меня есть несколько предложений. Перепробовав разные варианты в течение нескольких лет, мой основной совет заключается в следующем: только не надо изготавливать монтажный стол!
Во многих книгах для любителей предлагается пойти в магазин и купить бруски сечением 2х4'' (50х100 мм) и фанеру для самостоятельного изготовления рабочего стола с тем, чтобы рабочее место удовлетворяло строгим критериям по размеру и форме. Я же нахожу это несколько затруднительным. Что касается меня, то, на мой взгляд, точный размер и форма стола не играют слишком большой роли. Я полагаю, что наиболее важная вещь — это место для хранения компонентов и приборов.
Хочется, прежде всего, чтобы все инструменты/приборы и компоненты были легкодоступны вне зависимости от того, что это маленькие транзисторы или большие мотки провода (рис. 5.1). Я определенно не хочу рыться по полкам, что потребует от меня встать и пересечь комнату.

Рис. 5.1. Идеальное рабочее место — это то, которое окружают специально предназначенные места для хранения компонентов и приборов. Больше вам никогда не нужно будет подниматься с вашего стула!
Все это приводит меня к двум следующим выводам:
1. Вам необходимы места для хранения, расположенные вокруг рабочего стола.
2. Вам нужны места для хранения снизу стола.
Многие проекты монтажных столов типа «сделай сам» (англ. DIY — от «do it yourself») имеют очень мало места для хранения или даже вовсе не предусматривают его под столом. Часто такие столы предлагают открытые полки, которые естественно будут все время пылиться. По моему мнению минимальная конфигурация стола должна включать в себя две тумбы хотя бы с парой выдвижных ящиков со столешницей из фанеры толщиной 3/4'' (19 мм) или столешницей для кухонного стола Formica, установленной на эти тумбы. Тумбы стола с ящиками являются идеальным местом для хранения объектов разной формы, а не только папок.
Среди всех столов, которые я использовал, один нравился мне больше всего — это офисный стальной стол — «монстр» старого образца, изготовленный еще в конце 1950-х гг. Его было очень трудно двигать (из-за его веса) и выглядел он совершенно неказисто, но вы, наверное, еще сможете его недорого купить у продавцов мебельного секондхенда; эти столы имеют огромные размеры, выдерживают любые нагрузки и будут служить вам бесконечно долго. Ящики в тумбах глубокие и обычно выдвигаются и задвигаются без особых усилий, как хорошие ящики для бумаг. Кроме того, такой стол имеет такое количество стали, что может использоваться для вашего заземления перед касанием компонентов, которые очень чувствительны к воздействию статического электричества.
Если вы используете антистатический браслет, то вы можете присоединить его к винту, прикрутив винт в угол стола.
Что же вам следует хранить в глубоких выдвижных ящиках вашего стола или шкафчиках для картотеки? Вам наверняка может быть полезным некоторое количество бумажных материалов, к которым, вероятно, можно отнести следующие документы:
• листы технических данных на изделия;
• каталоги деталей;
• эскизы и схемы, которые вы нарисовали ранее.
Оставшийся объем каждого ящика может быть заполнен пластмассовыми коробками для хранения различных предметов.
В коробках можно хранить приборы/инструменты, которые вы не используете часто (например, промышленный фен или мощный паяльник), а также компоненты большого размера (например, динамики, сетевые адаптеры, корпуса для проектов и платы для монтажа схем). Вы должны выбрать ящики для хранения размером примерно 11'' (28 см) в длину, 8'' (20 см) в ширину и 5'' (13 см) глубиной с ровными боковыми сторонами. Ящики, которые вы можете купить в компании Wal-Mart (крупнейшей в мире розничной сети), будут дешевле, но они часто имеют скошенные боковые стороны, а поэтому не слишком емкие.
Ящики, которые мне нравятся больше всего, это ящики Akro-Grid, которые изготавливаются компанией Akro-Mils (рис. 5.2 и 5.3). Они очень жесткие, ровные и для них можно дополнительно заказать прозрачные крышки. Вы можете загрузить весь каталог компании Akro-Mils с веб-сайта http://www.akro-mils.com, а после выполнить поиск в Интернете розничных продавцов. Вы обнаружите, что компания Akro-Mils также продет огромное количество различных контейнеров для деталей, но я не люблю открытые их версии, поскольку их содержимое будет находиться под воздействием грязи и пыли.

Рис. 5.2. Ящики Akro-Grid в боковых стенках имеют углубления, которые дают возможность разделить их на большое количество отсеков для удобного хранения деталей

Рис. 5.3. Крышки для ящиков Akro-Grid продаются отдельно, что позволяет защищать компоненты от проникновения пыли. Высота ящика, который приведен на рис. 5.2, дает возможность поставить в стопку три ящика, как типичные выдвижные ящики для хранения документов. А ящик, который показан здесь, можно устанавливать друг на друга по два
Для компонентов средних размеров, например, потенциометров, разъемов питания, управляющих кнопок и кнопочных переключателей, я предпочитаю емкости для хранения размерами 11'' (28 см) в длину, 8'' (20 см) в ширину и 2'' (5 см) глубиной, разделенных на секции — от четырех до восьми. Вы можете купить их у компании Michaels (строительный супермаркет), но я предпочитаю через Интернет покупать торговую марку компании Plano, потому что их конструкция предназначена для более длительных сроков эксплуатации. Изделия компании Plano наиболее пригодны для хранения компонентов среднего размера, которые удобно систематизировать подобно коробкам для хранения рыболовных снастей; их можно найти в Интернете по следующему адресу: http://www.planomolding.com/tackle/products.asp.
В качестве идеальных по размеру плоских ящиков можно привести модель Prolatch 23600–00 с защелками (рис. 5.4), потому что входит в выдвижной ящик. Вы можете укладывать стопку таких ящиков вдоль длинной стороны.

Рис. 5.4. Данный ящик компании Plano не разделен на части, что делает его полезным для хранения мотков проволоки или приборов/инструментов среднего размера. Когда они устанавливаются вертикально длинной стороной вверх, то будут точно входить в ящик тумбы стола
Компания Plano также продает очень хорошо спроектированные инструментальные ящики, один из которых можно держать на рабочем столе. В них есть небольшие выдвижные ящики с хорошим доступом для хранения отверток, плоскогубцев и других основных инструментов. Поскольку для большинства электронных проектов вам требуется рабочая область площадью всего лишь около трех квадратных футов (приблизительно 2800 см2), выделение небольшого пространства для инструментального ящика будет не слишком большой потерей.
Даже если у вас имеется стальной стол с относительно неглубокими ящиками, то один из них может быть отведен для напечатанных каталогов. Не пренебрегайте полезной печатной копией только потому, что вы все можете купить в Интернете. Например, каталог компании Mouser имеет алфавитный указатель, который разделен на несколько полезных категорий и в некотором отношении лучше, чем его версия в Интернете. Много раз я находил очень полезные детали, о существовании которых я и не подозревал, просто перелистывая каталог, что гораздо быстрее, чем пролистывание PDF-страниц на компьютере, даже при широкополосном доступе. В настоящее время компания Mouser достаточно любезно рассылает свои каталоги, которые содержат более 2000 страниц. Компания McMaster-Carr также высылает каталоги, но только после выполнения заказа и только один раз в год.
А теперь важный вопрос: как хранить все эти пустяковые маленькие детали, как например, резисторы, конденсаторы и чипы?
Я пытался решить эту проблему разными способами. Наиболее очевидное решение это купить шкаф с маленькими выдвижными ящичками, каждый из которых должен выниматься, чтобы его можно было положить на рабочий стол для рассмотрения содержимого. Но мне не нравится эта система по двум причинам.
Прежде всего для очень маленьких компонентов вам потребуется разделить внутренний объем ящичков, а разделители никогда прочно не держатся. А, во-вторых, извлечение ящичков создает риск случайного высыпания содержимого на пол. Может быть вы очень аккуратны, чтобы допустить такое событие, но я нет!
Мое персональное пристрастие это использование коробок Mini-Storage компании Darice, которые показаны на рис. 5.5. Вы можете найти их в супермаркете Michaels в небольших количествах или купить более дешево в Интернете на таком сайте, как http://www.craftamerica.com.
Рис. 5.5. Корбки Mini-Storage компании Darice идеальное место для хранения таких компонентов, как резисторы, конденсаторы и полупроводники. Коробки можно укладывать друг на друга в стопку и ставить на полки, приклеив этикетки на их края. Наклейка с брендом может быть легко удалена после нагрева промышленным вентилятором
Синие коробки разделены на пять отсеков, которые точно соответствуют по размеру и форме резисторам. Желтые коробки разделены на 10 отсеков, что идеально для полупроводников. Пурпурные коробки вообще не имеют внутреннего разделения, а красные имеют отсеки различной величины.
Перегородки едины с коробкой и поэтому вы не должны больше беспокоиться, как это было бы в случае съемных разделителей, которые часто меняют свое положение, что приводит к смешиванию компонентов. Крышки коробок устанавливаются так плотно, что даже если вы случайно их уроните, то почти наверняка крышка не откроется. Все крышки имеют металлические петли и жесткий буртик по краю, что делает соединение коробок между собой очень прочным.
Я разместил мои маленькие коробки для хранения деталей на полках, установленных над рабочим столом; при этом расстояние между полками 3'' (7,6 см), что позволяет на каждой полке установить две коробки (одна на другой). Если вы хотите использовать определенный набор коробок, то вы можете вытащить их и положить на рабочий стол.
Маркировка
Вне зависимости от выбранного вами способа хранения ваших деталей их маркировка играет важную роль. Любой струйный принтер в состоянии выполнить хорошо оформленные этикетки. Если вы используете наклеиваемые (непостоянные) этикетки, то у вас будет возможность провести реорганизацию учета и хранения деталей в будущем, как только это будет нужно.
Я использую наклейки с цветными кодами для моей коллекции резисторов таким образом, чтобы я мог сравнивать полоски на резисторе с кодом на этикетке и сразу же видеть куда следует поместить тот или иной резистор (рис. 5.6, ЦВ-рис. 5.6).

Рис. 5.6. Чтобы сразу видеть, что резисторы находятся в соответствующем отсеке, нужно на каждой наклейке напечатать цветовую кодовую маркировку резистора
Еще лучше, если вы поместите вторую этикетку (не липкую) внутри каждого отсека с компонентами. Эта этикетка покажет вам номер детали производителя и источник ее приобретения, что позволит легко заказать новые детали. Я покупаю большое количество компонентов в компании Mouser, и когда я открываю их маленькие коробочки с деталями, я отрезаю часть коробочки с идентификационной этикеткой и приклеиваю ее к отсеку с деталями перед тем, как положить внутрь детали. Это позволяет в дальнейшем избежать неприятностей.
Если бы я был бы действительно хорошо организованным человеком, то я бы наверное составил базу данных на моем компьютере с перечислением всего того, что я покупаю, включая дату, источник, тип компонента и их количество. Но, увы, я таковым не являюсь.
На рабочем столе
Некоторые отдельные предметы настолько существенны, что они должны находиться на рабочем столе постоянно. К ним относятся ваш паяльник(и), держатели «третья рука» с увеличительным стеклом, настольная лампа, макетная плата, набор розеток сетевого напряжения и блок питания. В качестве настольной лампы я предпочитаю использовать флюоресцентную лампу со спектром, близким к дневному свету, поскольку она дает равномерный пучок света и помогает мне различать близко расположенные цветные полоски на резисторах.
Блок питания это предмет, который зависит от персональных предпочтений. Если вы серьезно хотите заняться электроникой, то можете купить себе устройство, которое дает на выходе стабилизированное и регулируемое напряжение различной амплитуды. Ваше маленькое устройство от компании RadioShack не в состоянии выполнить какое-либо из этих требований, а его выходное напряжение сильно меняется в зависимости от того насколько большая нагрузка подключена. На самом деле, как вы уже могли заметить, его вполне достаточно для выполнения основных экспериментов, но когда необходимо работать с логическими микросхемами, для вашей макетной платы вы должны установить источник стабилизированного 5-вольтового напряжения. В общем, я считаю, что хороший блок питания должен каждый раз подбираться в соответствии с потребностями.
Другой позицией, которая должна выбираться по своему желанию, является осциллограф. Это устройство в графической форме может показать вам электрические сигналы, проходящие по вашим проводам и компонентам, а вы, подключая измерительные щупы к различным точкам схемы, можете отслеживать возникновение ошибок. Это прекрасное устройство, обладание которым имеет важное значение, но оно обойдется вам в несколько сот долларов и для наших задач не является необходимым. Если же вы планируете серьезно заняться схематическими решениями в области аудиоаппаратуры, то осциллограф становится очень важным устройством, поскольку вам наверняка понадобится наблюдать за формой генерируемого сигнала.
Вы можете попытаться сэкономить на осциллографе, купив устройство, которое подключается к USB-порту вашего компьютера, и использовать монитор компьютера для отображения сигнала. Я пытался поработать с одним из таких устройств, и результаты меня не впечатлили. Он работает, но для низкочастотных сигналов не кажется точным или надежным. Может быть мне не повезло; но я решил не продолжать изучение подобных устройств других производителей.
Поверхность вашего рабочего стола, вне всякого сомнения, со временем станет неровной от царапин, порезов и следов от капель расплавленного припоя. Поэтому я использую кусок фанеры толщиной 1/2'' (около 13 мм) и площадью два квадратных фута (1858 см2), которая защищает мою основную рабочую область и на которую я устанавливаю миниатюрные тиски. Чтобы уменьшить риск негативного воздействия статического электричества при работе с чувствительными компонентами, фанеру я покрываю куском проводящей губки. Это недешево, но ее преимущество в том, что она создает дополнительную защиту для микросхем. Вместо случайного рассыпания компонентов я фиксирую их на губке, как саженцы в саду. И точно так же как в саду, я могут разделить их на участки с резисторами на одной стороне, конденсаторами на другой и с чипами посередине.
Неизбежно во время вашей работы будут создаваться определенные отходы. Небольшие куски согнутого провода, разбросанные винты, фиксаторы и кусочки снятой изоляции, которые имеют тенденцию к накоплению и могут стать источником неприятностей. Если металлические части или фрагменты попадут на ваше устройство, то это может стать причиной короткого замыкания. Поэтому вам будет нужна мусорная корзина. Но она должна быть такой, чтобы ею можно было легко пользоваться.
Я использую большое мусорное ведро, поскольку оно настолько велико, что в него трудно не попасть, когда я в него что-то выбрасываю, и не позволяет забыть о своем существовании.
И напоследок, то, что важнее всего: компьютер. Теперь все листы технических данных доступны в Интернете, и там же можно заказать компоненты, а многие образцы схем выкладываются там же любителями электроники и теми, кто занимается обучением в этой области. Я не думаю, что кто-либо сможет работать эффективно без быстрого доступа в Интернет. Чтобы избежать бесполезного растрачивания пространства рабочей области, я думаю вы можете использовать недорогой ноутбук, который имеет небольшие размеры. Возможная конфигурация рабочего стола, в котором используется стальная столешница, показана на рис. 5.7.
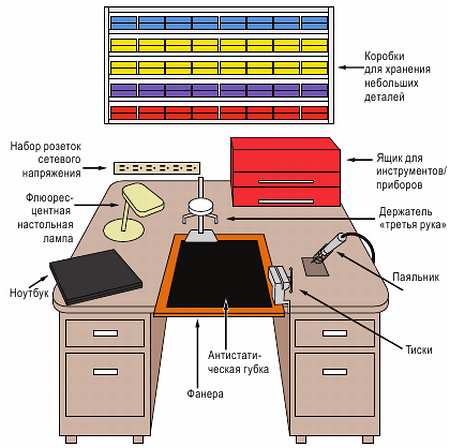
Рис. 5.7. Старый офисный металлический стол может быть настолько хорош, что при монтаже небольших электронных проектов будет лучше обычного рабочего стола. Он предоставляет большое рабочее пространство и большие емкости для хранения, а также достаточную массу для того, чтобы заземлить вас для работы с компонентами, которые чувствительны к воздействию статического электричества
Источники информации
В интернете
Мой любимый образовательный и информационный сайт это Doctronics (http://www.doctronics.co.uk). Мне нравится, как на нем изображаются схемы, и мне нравится способ добавления многих иллюстраций схем на макетных платах (о чем многие сайты просто не беспокоятся). На сайте также продают наборы, если вы готовы заплатить и подождать доставки из Великобритании. Часть одной из страниц с сайта Doctronics приведена на рис. 5.8.
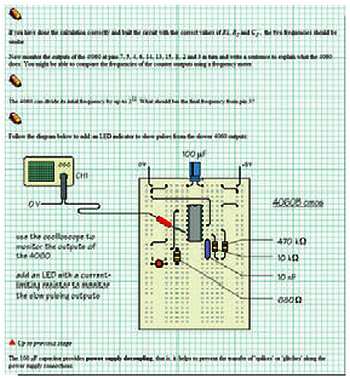
Рис. 5.8. Образец страницы с сайта http://www.doctronics.co.uk показывает их подход к изображению схем с достаточно подробным описанием. Это очень ценно для источников, которые доступны в Интернете
Моим следующим любимым сайтом для любителей электроники является сайт также британского происхождения: Electronics Club (Клуб любителей электроники) (http://www.kpsec.freeuk.com). Он не такой многосторонний и всеобъемлющий, как Doctronics, но имеет очень дружественный интерфейс и воспринимается очень легко.
Для более основательного подхода с точки зрения теории попробуйте обратиться на сайт http://www.electronics-tutorials.ws.
На нем теория изложена несколько глубже, чем та, которую я использовал во вставках, посвященных теоретическим вопросам в данной книге.
Для выбора уникальных статей по электронике попробуйте зайти на сайт Don Lancaster's Guru's Lair (берлога гуру Дона Ланкастера) (http://www.tinaja.com). Дон Ланкастер уже более 30 лет назад написал книгу «The TTL Cookbook» (Поваренная книга TTL), которая открыла мир электроники, по меньшей мере, двум поколениям любителей электроники и экспериментаторов. Он знает то, о чем говорит, и не боится проникать в некоторые весьма амбициозные области, как например, написание собственных драйверов на языке PostScript и создание собственных подключений через последовательные порты. В ней вы найдете достаточно много замечательных идей.
Книги
Да, вам понадобятся книги. Раз вы уже читаете данную книгу, то я не собираюсь рекомендовать вам другие руководства для начинающих. Вместо этого, учитывая направленность данной главы, я предложу некоторые названия, которые дадут вам возможность продвинуться дальше в различных направлениях и которые могут служить источником информации. У меня есть эти книги и я нахожу их весьма полезными.
• Practical Electronics for Inventors, by Paul Scherz (McGraw-Hill, Second Edition, 2007) — (Пол Херц. Практическая электроника для изобретателей. 2-е изд. — McGraw-Hill, 2007).
Это массивное всеобъемлющее издание, которое полностью оправдывает свою цену $40. Несмотря на заголовок этой книги, вам не понадобится изобретать что-либо полезное. Это мой основной источник информации, в котором изложен широкий диапазон концепций, от базовых свойств резисторов и конденсаторов и далее, вплоть до весьма продвинутых математических выкладок. Даже если вы купите только одну книгу (в дополнение к этой, конечно), то на этом мои рекомендации были бы исчерпаны.
• Getting Started with Arduino, by Massimo Banzi (Make: Books, 2009) — (Массимо Банци. Для начинающих изучать Arduino[11]. — Make Books, 2009).
Если вы ощутите простоту и удобство использования программируемого микроконтроллера PICAXE, который я опишу позднее в этой главе, то обнаружите, что Arduino в состоянии сделать гораздо больше (рис. 5.9).
Пособие для начинающих это самое простое введение в этот вопрос, которое поможет вам освоить язык Processing, используемый для Arduino (очень похож на язык программирования С, но отличается от версии BASIC, используемой в микроконтроллерах PICAXE).
Рис. 5.9. Эти книги из серии MAKE обеспечат вам руководство, если вы решите продвинуться далее базовых микроконтроллеров в мир более экзотических микросхем Arduino
• Making Things Talk, by Tom Igoe (Make: Books, 2007) — (Том Игой. Заставить вещи разговаривать. — Make Books, 2007).
Этот амбициозный и всеобъемлющий труд рассказывает каким образом сделать большинство возможностей Arduino взаимодействующими с окружающим миром вплоть до возможности сайтов в Интернете.
• TTL Cookbook, by Don Lancaster (Howard W. Sams & Co, 1974) — (Дон Ланкастер. Поверенная книга TTL. — Howard W. Sams&Co, 1974)
Дата выхода в свет 1974 — это не ошибка! Вы сможете найти и более поздние издания, но вне зависимости от того, какого года издание вы купите, это будет секонд-хенд и, возможно дорогой секонд-хенд, потому что именно эта книга уже начинает приобретать библиографическую ценность. Ланкастер написал свое руководство до создания микросхем семейства 7400 на основе CMOS-микросхем с четырьмя контактами, но это все еще хороший источник информации, поскольку концепции и номера деталей не изменились, а его манера изложения материала чрезвычайно аккуратна и лаконична (рис. 5.10).
Рис. 5.10. Выцветшая на солнце классическая книга Дона Ланкастера TTL Cook-book (Поваренная книга TTL), каталог от Mouser Electronics объемом 2000 страниц и два подробных учебника, которые в состоянии обеспечить дополнительной информацией во всех областях электроники в течение многих лет
• CMOS Sourcebook, by Newton C. Braga (Sams Technical Publishing, 2001) — (Ньютон С. Брага. Сборник оригинальных статей по КМОП-микросхемам. — Sams Technical Publishing, 2001).
Эта книга полностью посвящена КМОП-микросхемам серии 4000, а не серии 74HC00, которую я прежде всего использовал в этой книге. Серия 4000 более ранняя и ее нужно использовать аккуратнее, поскольку она наиболее чувствительна к статическому электричеству, чем поколения, спроектированные позже. Однако эти микросхемы все еще остаются широко распространенными и их основное преимущество заключается в том, что они довольно хорошо работают в широком диапазоне питающих напряжений — обычно в пределах от 5 до 15 В. Это означает, что вы, например, можете смонтировать схему с напряжением питания 12 В, которое будет использовать таймер 555, при этом выход таймера может напрямую подаваться на КМОП-микросхемы. Материал книги разумно разделен на три части: базовые сведения о КМОП, функциональные блок-схемы (на которых показана разводка выводов всех основных чипов) и простые схемы, которые демонстрируют, каким образом могут быть использованы основные функции микросхем.
• The Encyclopedia of Electronic Circuits, by Rudolf F. Graf (Tab Books, 1985) — (Рудольф Ф. Граф. Энциклопедия электронных схем. — Tab Books, 1985).
Крайне разнообразная коллекция схем с минимальными комментариями. Эту книгу полезно иметь под рукой, если у вас возникла идея и вам хочется узнать каким образом кто-либо еще пытался решить такую же проблему. Примеры часто имеют бóльшую ценность, чем объяснения общего характера, а в этой книге просто представлен огромный массив примеров. Кроме того, опубликованы многие дополнительные тома этой серии, но лучше начинать с этой, потому что очень быстро вы обнаружите, что в ней есть все, что может понадобиться.
• The Circuit Designer's Companion, by Tim Williams (Newnes, Second Edition, 2005) — (Тим Вильямс. Справочник конструктора электронных схем. 2-е изд. — Newnes, 2005).
В книге приведено много полезной информации о выполнении работ, используемых в практических приложениях, но стиль изложения несколько сух и упор сделан на технические аспекты. Она может быть полезной, если вы захотите реализовать свои проекты в реальном мире.
• The Art of Electronics, by Paul Horowitz и Winfield Hill (Cambridge University Press, Second Edition, 1989) — (Пол Хоровитц и Винфилд Хилл. Искусство электроники. 2-е изд. — Cambridge University Press, 1989).
Тот факт, что эта книга выдержала более 20 изданий, говорит прежде всего о двух вещах: 1) многие люди считают этот труд фундаментальным источником информации; 2) приобретение этой книги в магазинах «старой книги» не вызывает трудностей, что очень важно, поскольку ее цена более $100. Она написана двумя академиками и обладает более сложным техническим подходом, чем Practical Electronics for Inventors (Практическая электроника для изобретателей), но я считаю ее полезной, когда хочу найти какую-либо дополнительную информацию.
• Getting Started in Electronics, by Forrest M. Mims III (Master Publishing, Fourth Edition, 2007) — (Форрест М. Мимс III. Начальное руководство по электронике. 4-е изд. — Master Publsihing, 2007).
Хотя первый раз эта книга была издана в далеком 1983 году, все еще есть смысл ее использовать. Я считаю, что очень многие проблемы, изложенные в ней, я раскрыл в этой книге, но вам может быть полезным почитать объяснения и советы из совершенно другого источника; кроме того, книга несколько более продвинута в теоретическом плане, чем это сделано у меня, но при этом достигнута простота изложения в сочетании с оригинальными чертежами схем. Но будьте внимательны, эта книга охватывает очень небольшой круг электрических проблем. Не рассчитывайте на то, что найдете в ней совершенно все ответы.
Эксперимент 25. МАГНЕТИЗМ
Этот эксперимент должен быть частью школьной программы физического кабинета, но даже если вы помните, как он производился, я предлагаю повторить его снова, поскольку его организация занимает немного времени, но он должен стать нашей исходной точкой для целой новой темы: соотношения между электрическим и магнитным полем. Это быстро приведет нас к воспроизведению звука и радио, а я опишу фундаментальные основы самоиндукции, которая является третьим и последним основным свойством пассивных компонентов (два других это сопротивление и проводимость). Я оставил самоиндукцию на десерт, потому что она не слишком важна в экспериментах, которые вы уже выполнили. Но так как мы начинаем иметь дело с аналоговыми сигналами, которые изменяются во времени, то это обстоятельство становится существенным.
Вам понадобятся:
1. Большая отвертка — 1 шт.
2. Провод 22 AWG (одножильный диаметром 0,64 мм, многожильный 0,76 мм) или тоньше. Количество — 6 футов (183 см).
3. Батарейка типа AA — 1 шт.
Порядок действий
Что-либо более простое придумать сложно. Нужно намотать провод на стержень отвертки вблизи ее конца (рис. 5.11).
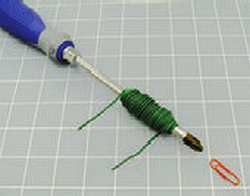
Рис. 5.11. Любой, кто почему-то забыл эту главную демонстрацию электромагнетизма для детей, должен попытаться повторить ее просто для удовольствия, чтобы доказать, что одна батарейка размером АА в состоянии двигать канцелярскую скрепку
Витки должны быть аккуратными и затянутыми, а также расположенными близко друг к другу. Вам нужно будет сделать порядка 100 витков, которые должны занимать по длине не более 2'' (50 мм). Чтобы они уложились в этот объем, вам придется наматывать следующие витки на те, которые были уже уложены ранее. Если последний виток проявляет тенденцию к «саморазматыванию» (это может случиться, если вы используете многожильный провод), его надо зафиксировать куском скотча.
Теперь надо к этой катушке подключить батарейку, как это показано на рис. 5.12.
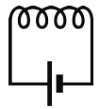
Рис. 5.12. Трудно придумать какую-либо более простую схему, чем эта
На первый взгляд это выглядит довольно глупо, поскольку вы собираетесь закоротить собственную батарейку — это то, что мы делали в эксперименте 2. Но прохождение тока через провод, который намотан, в отличие от прямого провода будет приводить к выполнению некоторой работы до того, как заряд батарейки кончится.
Положите небольшую канцелярскую скрепку вблизи жала отвертки на гладкую, скользкую поверхность, которая не создает слишком большое трение. Пластик для этой цели подходит идеально. Поскольку многие отвертки уже обладают магнитными свойствами, вы можете увидеть, что канцелярская скрепка уже естественным образом притягивается к жалу отвертки. Если это происходит, то уберите отвертку несколько дальше, т. е. за пределы области притяжения. Теперь подключите батарейку с напряжением 1,5 В в цепь, и скрепка должна резко притянуться к жалу отвертки. Поздравляю, вы только что сделали электромагнит.
Двусторонняя взаимосвязь
Каждый электродвигатель, который когда-либо был сделан, в некоторой степени основан на взаимосвязи между электричеством и магнетизмом. Это абсолютно фундаментальное свойство мира, окружающего нас. Запомните, что электричество всегда создает магнитное поле.
Когда поток электронов проходит по проводу, он создает магнитное поле вокруг провода.
Справедливо и обратное: магнитное поле создает электрическое.
Когда провод перемещается в магнитном поле, это приводит к перемещению потока зарядов (току) в этом проводе.
Этот второй принцип используется для генерирования электроэнергии. Дизельный двигатель, или водяная турбина, или ветроэнергетическая установка, а также любой другой источник энергии вращает катушку проводов сквозь магнитное поле или вращает магниты рядом с какими-либо из массивных витков провода. В этих витках индуцируется электрическое поле.
В следующем эксперименте вы увидите драматическую мини-демонстрацию данного эффекта.
Индуктивность
Когда поток электронов проходит по проводу, он создает магнитное поле вокруг провода. Поскольку электричество (электрическое поле) «индуцирует» этот эффект, то он известен, как индуктивность. Этот эффект показан на рис. 5.13.
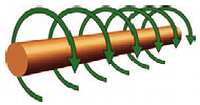
Рис. 5.13. Когда поток электрических зарядов передвигается слева направо вдоль этого проводника, он создает напряженность магнитного поля, направление которой показано стрелками
Поле вокруг прямого провода очень слабое, но если вы согнете провод в кольцо (сделаете один виток), напряженность магнитного поля начнет накапливаться и будет направлена в центр кольца, как это показано на рис. 5.14. Если витков добавить еще, то они образуют катушку, которая приводит к аккумулированию еще большей напряженности поля. А если в центр катушки вы поместите какой-либо магнитный предмет (например, такой, как отвертка), то эффективность этого возрастает еще больше.
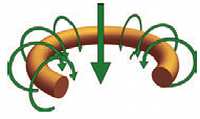
Рис. 5.14. Когда проводник сгибается в виток, накопленная напряженность магнитного поля будет направлена через центр кольца, как это показано на рисунке большой стрелкой
Далее приведена приблизительная формула, описывающая соотношение между диаметром катушки, длиной катушки от одного торца до другого, числа витков и их индуктивностью.
Буква L является символом, обозначающим индуктивность несмотря на то, что единица измерения этой величины Генри названа в честь американского пионера изучения электричества Джозефа Генри:
L (в мкГн) ≈ [(D х D) х (N х N)] / [(18 х D) + (40 х W)].
В этой формуле D — это диаметр катушки, N — число витков и W — длина катушки от одного торца до другого (рис. 5.15).
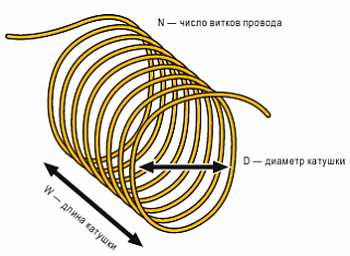
Рис. 5.15. Индуктивность катушки прямо пропорциональна ее диаметру и числу витков в квадрате. Если все другие параметры остаются постоянными, то уменьшение длины (расстояния от одного торца катушки до другого) за счет более плотной упаковки витков будет приводить к возрастанию индуктивности
Далее приведены три простых следствия из этой формулы.
• Индуктивность возрастает при увеличении диаметра катушки.
• Индуктивность возрастает в квадратичной зависимости от числа витков. (Другими словами увеличение витков в три раза приводит к увеличению индуктивности в девять раз).
• Если число витков остается фиксированным, то индуктивность снизится, если вы намотаете катушку таким образом, что она станет тоньше и длиннее, но ее эффективность увеличится, если вы сделаете ее толстой и короткой.
Джозеф Генри (Joseph Henry)
Родившийся в 1797 году, Джозеф Генри (Joseph Henry) был первым человеком, который разрабатывал и демонстрировал мощные электромагниты. Он также является автором концепции «самоиндукции», означающей «электрическую инерцию», т. е. свойства, которым обладает катушка из провода.
Генри родился в семье поденного рабочего в городе Олбани, штат Нью- Йорк (Albany, New York). Он работал в обычном магазине перед тем, как стать подмастерьем у часового мастера, а также интересовался профессией актера. Друзья убедили его поступить в Академию (Albany Academy), где и проявилась его склонность к науке.
В 1826 он получил место профессора математики и естественной философии в Академии, но даже тогда у него не было магистерской степени и он всегда говорил о себе, что он «принципиально самообразованный» человек. Майкл Фарадей (Michael Faraday) делал аналогичные исследования в Англии, но Генри о нем ничего не знал.
В 1832 году Генри получил место в Принстоне (Princeton), где он получил оклад $1000 в год и бесплатный дом для проживания. Когда Морзе попытался запатентовать телеграф, Генри говорил, что он уже знаком с этой концепцией и в самом деле построил систему, использующую аналогичные принципы для того, чтобы подавать сигналы домой своей жене, когда он работал в своей лаборатории в Философском корпусе (Philosophical Hall).
Генри изучал химию, астрономию и архитектуру в качестве дополнения к физике, а поскольку наука в то время не была разделена на различные отрасли, что имеет место в настоящее время, он исследовал такие явления как фосфоресценция, звук, капиллярные взаимодействия и баллистику. В 1846 году он в качестве секретаря возглавил только что основанный Смитсоновский институт (Smithsonian Institution).

Рис. 5.16. Джозеф Генри (Joseph Henry) — американский экспериментатор, который известен своими новаторски-ми работами в области электромагнетизма. Эта фотография хранится в архиве Wikimedia Commons
Обозначение катушек на схемах и основные сведения
Посмотрите на схематические символы, приведенные на рис. 5.17, которые используются для обозначения катушек. Следует помнить, что если катушка имеет железный сердечник, то она изображается с помощью дополнительной пары линий (иногда одной дополнительной линией). Если у нее ферритовый сердечник, то иногда эта линия делается штриховой.
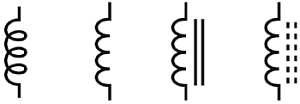
Рис. 5.17. Схематические изображения катушек. Крайнее слева изображение является самой старой версией. Третий и четвертый символы означают, что катушка намотана вокруг сплошного или порошкового магнитного сердечника соответственно
Стальной сердечник будет увеличивать индуктивность катушки, поскольку он увеличивает магнитное взаимодействие.
Катушка в изоляции обычно не имеет какой-либо полярности. Вы можете подключить ее без учета какой-либо полярности, но направление напряженности магнитного поля будет изменено соответствующим образом (катушки, которые используются в реальных условиях — такие, как трансформаторы и электромагнитные катушки — должны иметь полярность).
Возможно, наиболее широко распространенное приложение для катушек это трансформатор, в котором переменный ток в одной катушке индуцирует переменный ток в другой, часто используя один и тот же железный сердечник. Если первичная обмотка (входная) имеет в два раза меньше витков по сравнению со вторичной (выходной) катушкой, то напряжение будет удвоено, при уменьшении тока наполовину, при этом гипотетически считается, что эффективность трансформатора близка к 100 %.
Эксперимент 26. НАСТОЛЬНЫЙ ГЕНЕРАТОР НАПРЯЖЕНИЯ
Если у вас имеется всего лишь три компонента, то вы сможете наблюдать магнитное поле, генерируемое электрическими зарядами перед собой, прямо сейчас.
Вам понадобятся:
1. Цилиндрический магнит из неодима диаметром 3/4'' (19 мм), намагниченный в осевом направлении Количество — 1 шт. (Можно приобрести в Интернете, на таком сайте, как http://www.kjmagnetics.com.)
2. Катушка монтажного одножильного провода, 26 AWG (0,64 мм), длиной 100 футов (30 м). Количество — 1 шт.
3. Катушка обмоточного провода, четверть фунта (100 г), 26 AWG (0,64 мм), длиной около 314 футов (96 м). Количество — 1 шт. (Можно найти в Интернете по запросу «magnet wire» (провод для обмоток электромагнитов).)
4. Стандартный светодиод. Количество — 1 шт.
5. Электролитический конденсатор емкостью 100 мкФ. Количество — 1 шт.
6. Импульсный диод 2N4001 или аналогичный ему. Количество — 1 шт.
7. Соединительные коммутационные провода, т. е. отрезки монтажного многожильного изолированного провода с зажимами типа «крокодил» на концах. Количество — 2 шт.
Порядок действий
Вы сможете выполнить работы по этому эксперименту, воспользовавшись катушкой с монтажным проводом с размером, соответствующим размеру вашего магнита, но, вероятно, результаты будут лучше при использовании обмоточного провода; я полагаю, что вы будете использовать именно его, по крайней мере, изначально. Преимущество обмоточного провода заключается в том, что у него очень тонкий слой изоляции, который позволяет осуществлять плотную укладку витков, повышая тем самым индуктивность.
Сначала посмотрите в осевое отверстие катушки, чтобы увидеть виден ли внутри конец провода, который оставлен для извлечения, как это показано на рис. 5.18 и 5.19. Если это не так, то надо перемотать провод на цилиндрический предмет большого диаметра, а затем снова намотать его на катушку, но в этом случае нужно проследить за тем, чтобы внутренний конец катушки остался свободным.

Рис. 5.18. Обычная катушка монтажного одножильного провода длиной 100 футов (30 м) в состоянии продемонстрировать свои индуктивные свойства

Рис. 5.19. Обмоточный провод имеет более тонкий слой изоляции, что позволяет укладывать его витки достаточно плотно и приводит к наведению более мощного магнитного поля
Чтобы зачистить концы проводов универсальным ножом или наждачной бумагой удалите прозрачную изоляцию с каждого конца обмоточного провода. Для проверки качества удаления изоляции нужно взять мультиметр и измерить сопротивление между зачищенными концами провода. Если был получен хороший контакт, то вы должны получить значение сопротивления порядка 30 Ом или менее.
Поместите катушку на немагнитную непроводящую поверхность, например, дерево, пластик или покрытый стеклом стол. Воспользовавшись соединительными коммутационными проводами, к концам провода катушки присоедините светодиод. Полярность подключения не имеет значения. Теперь возьмите цилиндрический неодимовый магнит, который показан на рис. 5.20, и быстро вставьте его в отверстие катушки, а затем быстро извлеките его назад (рис. 5.21). Вы должны увидеть мигание светодиода либо при опускании магнита в катушку, либо при его извлечении.

Рис. 5.20. Три неодимовых магнита диаметром 1/4'' (6 мм), 1/2'' (13 мм) и 3/4'' (19 мм). Я хотел сфотографировать их на расстоянии около 15 мм друг от друга, но они этого не позволили

Рис. 5.21. При энергичном перемещении магнита вверх и вниз через отверстие в центре катушки вы генерируете необходимое количество электроэнергии, которой будет достаточно для загорания светодиода
Точно такой же эффект может получиться, а может и не получиться, если вы будете использовать катушку монтажного одножильного провода 26 AWG (0,64 мм). В идеале, ваш цилиндрический магнит должен входить в отверстие в центре катушки максимально плотно (рис. 5.22). Если будет большой воздушный зазор между катушкой и магнитом, то это значительно уменьшит магнитный эффект. Следует помнить, что если вы используете магнит устаревшей конструкции, изготовленный из железа, а не из неодима, то вероятнее всего, что у вас вообще ничего не получится.
Рис. 5.22. Поскольку индуктивность возрастает прямо пропорционально диаметру катушки и квадрату числа витков, полученная вами мощность на выходе от перемещения магнита через катушку может возрасти в значительной степени. Те, кто желает жить без использования сетей энергоснабжения, могут рассчитать такую конструкцию с использованием пара с достаточной мощностью для дома с тремя спальнями
Теперь осталась еще одна вещь, которую следует попробовать. Отсоедините светодиод и подсоедините электролитический конденсатор емкостью 100 мкФ последовательно с импульсным диодом, как это показано на рис. 5.23.
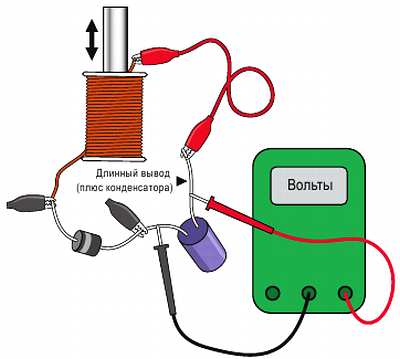
Рис. 5.23. Использование диода, который последовательно подключен к конденсатору, дает возможность зарядить конденсатор импульсами тока, которые генерируются магнитом при перемещении через центр катушки. Это является демонстрацией принципа выпрямления переменного тока
Чтобы измерить напряжение на контактах конденсатора подключите ваш мультиметр. Если у вашего мультиметра выбор диапазона измерения осуществляется вручную, то нужно установить диапазон 20 В постоянного тока. Следует убедиться, что анод диода (немаркированный вывод диода) подсоединен к минусовому (короткому) выводу конденсатора, чтобы положительное напряжение было подано сначала на конденсатор, а затем на диод.
Теперь надо энергично вставить магнит в катушку и извлечь его. Тестер должен показать, что конденсатор накопил заряд порядка 10 В. Когда вы перестаете двигать магнит, результат измерения напряжения будет постепенно изменяться в основном потому, что конденсатор разряжается через внутреннее сопротивление вашего мультиметра.
Этот эксперимент намного важнее, чем кажется. Имейте в виду, что, когда вы вставляете магнит в катушку, он генерирует ток в одном направлении, а когда извлекаете — в противоположном. Фактические вы генерируете переменное напряжение.
Диод всего лишь пропускает ток в одном направлении в схеме. Он не дает протекать току в другом направлении, что позволяет конденсатору накопить заряд. Если вы пришли к заключению, что диод может быть использован для преобразования переменного напряжения в постоянное, то в этом вы абсолютно правы. Мы говорим, что диод «выпрямляет» переменное напряжение.
Эксперимент 25 показал, что с помощью напряжения можно создать магнит. Эксперимент 26 показал, что магнит может создавать напряжение. Теперь мы готовы применить эту концепцию для выявления и воспроизведения звука.
Синяки и повреждения
Неодимовые магниты могут быть опасными. Они хрупкие и могут разбиться, если притягивают деталь из магнитного металла (или другой магнит). По этой причине многие производители рекомендуют использовать средства для защиты глаз.
Поскольку магнит притягивает с возрастающим усилием по мере уменьшения дистанции между ним и другим объектом, то конечный зазор сокращается внезапно и очень быстро. Вы можете легко повредить кожу или заработать синяк.
Если вблизи неодимового магнита оказывается предмет, изготовленный из железа или стали, то магнит найдет его и притянет, при этом результат может оказаться неприятным особенно, если этот предмет имеет острые края, а ваши руки находятся поблизости. При использовании магнита следует создавать свободное пространство на поверхности из немагнитного материала и следить за тем, чтобы магнитные объекты не оказывались под этой поверхностью. Мой магнит чувствовал стальной винт, который был ввинчен с нижней стороны столешницы кухонного стола и из-за этого неожиданно резко перемещался по этому столу.
Нужно опасаться намагничивания других деталей магнитом. Когда магнитное поле проходит через железный или стальной предмет, то этот предмет сам становится магнитом. Будьте осторожны, чтобы не намагнитить ваши часы!
Не следует использовать магниты вблизи компьютера, дисковода, банковских карт с магнитными полосами, кассет с пленкой любого типа и других носителей информации. Также не следует допускать приближения магнита к телевизионным экранам и мониторам (особенно к мониторам с катодными трубками). И, наконец, последнее по порядку, но не по важности — магнит может влиять на нормальное функционирование кардиостимулятора.
Эксперимент 27. ВСКРЫТИЕ ДИНАМИКА
Я хочу разобрать динамик диаметром 2'' (50 мм), несмотря на то, что это означает потерю $5 или что-то около этого. Конечно, я не считаю эти деньги выброшенными на ветер. Если вы хотите изучить работу какого-либо устройства, то нет ничего более полезного, чем возможность видеть его внутреннее устройство.
Возможно у вас уже есть такого рода динамик, который является частью уже бесполезного электронного устройства или игрушки, хранящихся в вашем чулане.
Вам понадобится.
• Самый дешевый динамик диаметром 2" (50 мм). Количество — 1 шт. На рис. 5.24 приведен пример такого динамика.

Рис. 5.24. Динамик диаметром 2'' (50 мм) может быть последовательно разобран с помощью универсального ножа или ножа X-Acto
Порядок действий
Положите динамик лицевой поверхностью вверх (как это показано на рис. 5.25) и выполните разрез по окружности его диффузора универсальным ножом или ножом X-Acto. Затем сделайте разрез вокруг сердечника и удалите кольцо из черной бумаги, которое образуется вследствие этих действий. Результат должен быть таким, как это показано на рис. 5.26.

Рис. 5.25. Динамик, подготовленный для творческого исследования его внутреннего содержимого

Рис. 5.26. Диффузор должен быть удален
Вы должны увидеть упругую горловину динамика, которая обычно изготавливается из желтой ткани. Если вы выполните разрез по ее краю, то сможете вытащить скрытый цилиндр из бумаги, вокруг которого намотана медная катушка динамика. Чтобы можно было лучше рассмотреть катушку, на рис. 5.27 я ее перевернул.

Рис. 5.27. Горловина диффузора должна быть извлечена. Обратите внимание на катушку из медной проволоки, которая входит в углубление между двумя магнитами в основании динамика
С помощью клемм, которые находятся на задней части динамика, к двум концам медного провода этой катушки обычно подается напряжение. Когда катушка находится в углублении, которое видно между внутренним и внешним магнитом, катушка при взаимодействии с магнитным полем воспринимает изменения в напряжении, создавая усилие, направленное вверх или вниз. Это приводит к вибрации диффузора динамика и создает звуковые волны.
Большие динамики в вашей домашней стереосистеме устроены точно так же. У них просто магниты большего размера и катушки, которые в состоянии передавать большую мощность (обычно порядка 100 Вт).
Когда бы я не вскрывал такие небольшие компоненты, как этот, меня всегда восхищала точность и изысканность внутренних деталей и тот способ их массового производства, который дает возможность продавать эти вещи по такой низкой цене.
Я представляю до какой степени могли бы быть поражены пионеры создания теории электричества (например, такие как Фарадей и Генри), если они бы увидели те компоненты, которые мы сегодня воспринимаем, как само собой разумеющееся. Генри тратил дни и недели для того, чтобы намотать катушку вручную для создания электромагнитов, которые были намного менее эффективными, чем в этом небольшом дешевом динамике.
Истоки создания динамиков
В конструкции динамиков используется тот факт, что если вы пропускаете переменный электрический ток через катушку, находящуюся в магнитном поле, то катушка будет перемещаться пропорционально амплитуде этого тока. Эта идея была опубликована еще в 1874 году Эрнстом Симменсом (Ernst Siemens), плодовитым немецким изобретателем. (Он также построил первый электрический лифт в 1880 году.) Сегодня компания Siemens AG является одной из самых крупных среди электронных компаний мира.
Когда Александр Грэхем Белл (Alexander Graham Bell) запатентовал телефон в 1876 году, он использовал идею Эрнста Симменса для генерирования звука в наушнике. После этого устройства воспроизведения звука постепенно улучшались с точки зрения качества звука и его мощности до тех пор, пока в 1925 году Честер Райс (Chester Rice) и Эдвард Келлог (Edward Kellogg) не опубликовали в General Electric статью, в которой были изложены основные принципы, используемые по настоящее время.
В Интернете по адресу http://www.radiolaguy.com/Showcase/GalleryHornSpkr.htm вы найдете отличные фотографии самых первых динамиков, в конструкции которых для увеличения их эффективности использовался рупор (рис. 5.28).

Рис. 5.28. Этот замечательный граммофон Amplion AR-114x показывает какие усилия предпринимали первые конструкторы, чтобы увеличить эффективность воспроизведения звука, когда мощность аудиоусилителей была очень ограниченной. Фотографии от «Sonny, the RadiolaGuy». Изображения первых динамиков показаны на сайте www.radiolaguy.com. Некоторые из них можно приобрести
По мере того, как усилители звука становились более мощными, эффективность динамика становилась менее важной по сравнению с качеством воспроизведения и стоимостью изготовления. Современные динамики преобразуют всего лишь 1 % электроэнергии в энергию акустического сигнала.
Звук, электричество и снова звук
Теперь подошло время объяснить каким образом звук преобразуется в электроэнергию и обратно в звук.
Предположим, что кто-то ударяет палкой в гонг. Кусок металла начинает вибрировать и создавать звуковые волны. Звуковая волна представляет собой пики высокого давления воздуха, за которыми следуют пики низкого давления.
Длина звуковой волны это расстояние (обычно оно в пределах от нескольких метров до миллиметров) между двумя соседними пиками.
Частота звука — это количество волн в секунду, которая обычно выражается в герцах.
Предположим, что вы расположите очень чувствительную мембрану из тонкого пластика на пути волн изменения давления. Пластик начнет колебаться под действием волн, как лист на ветру. Допустим, что к задней части мембраны вы прикрепите крошечную катушку так, что она будет перемещаться вместе с мембраной и пусть она будет менять свое положение относительно магнита, размещенного внутри катушки.
Эта конструкция выглядит подобно миниатюрному сверхчувствительному динамику, за исключением того, что вместо генерирования звука она генерирует электричество. Волны звукового давления заставляют мембрану перемещаться взад/вперед по оси магнита, а магнитное поле создает переменное напряжение в катушке.
Такая конструкция известна, как микрофон с подвижной катушкой.
Есть и другие способы изготовить микрофон, но эта конструкция наиболее проста для понимания. Конечно, генерируемое напряжение очень мало, но мы можем усилить его с помощью транзистора или даже ряда транзисторов. Затем мы можем направить полученный выходной сигнал на катушку обычного динамика и динамик воспроизведет звуковые волны. Все это показано на рис. 5.29–5.32.
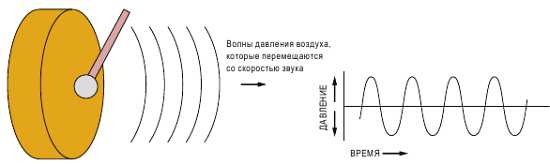
Рис. 5.29. Первый шаг процесса преобразования звука в электричество и обратно. Когда молотком ударяют в гонг, лицевая часть гонга вибрирует, создавая волны звукового давления, которые перемещаются в воздухе
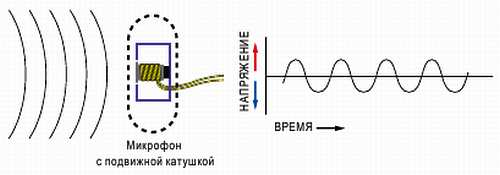
Рис. 5.30. Второй шаг процесса: волны звукового давления проходят через перфорированную оболочку микрофона и заставляют его мембрану вибрировать в соответствии со своей частотой. К мембране присоединена катушка. Когда катушки начинает вибрировать, магнит, расположенный в ее центре, создает в ней переменный ток
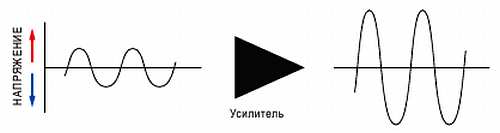
Рис. 5.31. Третий шаг процесса: небольшие по мощности сигналы микрофона проходят через усилитель, который увеличивает их амплитуду, сохраняя частоту и внешний вид волновой формы

Рис. 5.32. Четвертый шаг процесса: усиленный электрический сигнал проходит через катушку динамика. Магнитное поле, созданное током, заставляет вибрировать диффузор динамика, который таким образом будет воспроизводить исходный звук
В каком-то месте этого пути преобразования мы можем записать звук и затем воспроизвести его. Но принцип остается неизменным. Наиболее сложная часть на этом пути это конструирование микрофона, усилителя и динамика которые должны точно воспроизводить соответствующие сигналы на каждом этапе.
Это очень серьезная задача, поскольку делает точное воспроизведение звука труднодостижимым.
Вначале надо понять, что происходит внутри провода, когда осуществляется генерирование магнитного поля. Очевидно, что какая-то часть мощности, передаваемой по проводу, преобразуется в магнитное поле. Но только, что именно происходит?
Эксперимент 28. ПРОЦЕСС РЕАГИРОВАНИЯ КАТУШКИ ИНДУКТИВНОСТИ
Конденсатор поглощает некоторое количество постоянного тока до тех пор, пока он не будет полностью заряжен, после чего он прекращает пропускать ток. Существует несколько другое явление, которое я пока не упоминал и которое является противоположным поведению емкости. Оно известно, как собственная индуктивность, и вы можете обнаружить ее в любой проволочной катушке. В начальный момент она ограничивает постоянный ток (сопротивляется его прохождению), но затем это сопротивление постепенно исчезает. Приведу несколько определений:
• Сопротивление.
Препятствует протеканию тока и создает падение напряжения.
• Емкость.
На начальном этапе позволяет току протекать, а затем не пропускает его. Это поведение известно, как емкостное сопротивление.
• Индуктивность.
На начальном этапе препятствует протеканию тока, а затем дает возможность ему протекать беспрепятственно. Это явление обычно называют индуктивным сопротивлением.
На практике вы можете найти термин «реактивное сопротивление», который используется в этом же смысле, но поскольку термин «собственная индуктивность» или просто индуктивность более правильный, я буду использовать его.
В данном эксперименте вы увидите индукцию в действии.
Вам понадобятся:
1. Светодиоды с низким потреблением тока. Количество — 2 шт.
2. Катушка монтажного одножильного провода, 26 AWG (0,64 мм), длиной 100 футов (30 м). Количество — 1 шт.
3. Резистор с сопротивлением 220 Ом мощностью 0,25 Вт или более. Количество — 1 шт.
4. Электролитический конденсатор емкостью 2000 мкФ или более. Количество — 1 шт.
5. Кнопочный однополюсный однопозиционный переключатель. Количество — 1 шт.
Порядок действий
Посмотрите на схему, которая приведена на рис. 5.33.
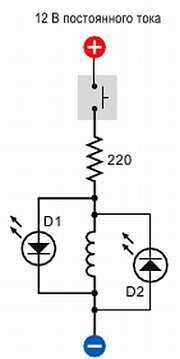
Рис. 5.33. В демонстрации эксперимента с собственной индукцией диоды D1 и D2 являются светодиодами. Когда кнопка замыкается, светодиод D1 делает короткую вспышку, поскольку изначально катушка будет создавать сопротивление протекающему току. Когда кнопка размыкается вспыхнет светодиод D2, поскольку созданной катушкой магнитное поле индуцирует другой короткий импульс тока
На первый взгляд в ней нет ничего сложного. Волнистым символом обозначена катушка индуктивности — более ничего интересного в ней нет. Поэтому очевидно, что при нажатии кнопки напряжение будет поступать на резистор с сопротивлением 220 Ом.
Таким образом ток, пройдя через резистор, затем потечет через катушку индуктивности, игнорируя два светодиода, поскольку очевидно, что сопротивление катушки намного меньше сопротивления любого из них (тем более, что один из них подключен в обратном направлении).
Что же будет происходить? Давайте найдем ответ на этот вопрос. В качестве катушки индуктивности можно взять катушку монтажного провода 26 AWG (или более тонкий) длиной 100 футов (30 м), хотя моток обмоточного провода, который использовался нами в эксперименте 25, будет работать гораздо лучше, если, разумеется, он у вас есть в наличии. Нам снова будет нужен доступ к обоим концам провода и, если нет доступа к внутреннему концу провода, то вам придется перемотать катушку, предварительно оставив свободным начальный конец провода.
Теперь у вас есть катушка индуктивности, которую вы можете подключить к макетной плате так, как это показано на рис. 5.34 (ЦВ-рис. 5.34), зеленый кружок на плате это кнопочный переключатель, а два красных небольших кружка это светодиоды. Убедитесь, что используете светодиоды с малым потреблением тока (в противном случае вы можете ничего не увидеть), также следует проверить, чтобы полярность подключения светодиодов была противоположной. Кроме того, резистор с сопротивлением 220 Ом должен иметь номинальную мощность 0,25 Вт или выше, если это возможно (см. последующее предостережение).
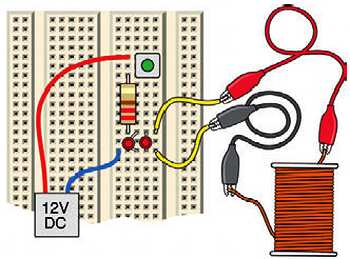
Рис. 5.34. Версия собранной на макетной плате схемы, которая была приведена на рис. 5.33, что позволяет наиболее просто выполнить демонстрацию эксперимента. Зеленый кружок в квадрате — это кнопочный переключатель. Два красных, рядом расположенных кружка — это светодиоды, которые должны быть подключены так, чтобы полярность их подключения была противоположной
Горячие резисторы
При включении напряжения питания через резистор с сопротивлением 220 Ом будет протекать ток величиной порядка 50 мА. Если напряжение питания равно 12 В, то мощность, выделяемая на резисторе, составит порядка 0,6 Вт. В случае использования резистора мощностью 0,125 Вт это приведет к его перегрузке, он достаточно сильно разогреется и может сгореть. Если же вы примените резистор мощностью 0,25 Вт, то он тоже разогреется, но вероятность его перегорания будет мала, если, конечно, вы не будете удерживать кнопку в нажатом состоянии более 2 с.
Не включайте схему без подключенной катушки! Это может привести к тому, что через светодиоды начнет проходить ток величиной более 50 мА
Когда вы нажмете на кнопку, один из светодиодов кратковременно вспыхнет. Когда вы отпустите кнопку, должен вспыхнуть другой светодиод.
Что же происходит? Катушка обладает индуктивностью, а это означает, что она реагирует на любые быстрые изменения протекающего тока. Сначала она противодействует току и в течение этого кроткого времени она препятствует прохождению большей части тока. Естественно, что ток выбирает другой путь и проходит через светодиод D1, который на схеме показан слева. (Светодиод D2 не реагирует, поскольку он пропускает ток только в противоположном направлении).
Тем временем разность потенциалов преодолевает индукцию катушки. Когда влияние индукции исчезает, сопротивление катушки становится не более 10 Ом, и теперь ток может протекать через катушку, а через светодиод пойдет настолько малый ток, что он погаснет.
Когда вы отключаете напряжение питания, катушка будет реагировать снова. Она сопротивляется любому резкому изменению. После отключения тока катушка какое-то время активно старается его сохранить, поскольку магнитное поле исчезает и преобразует свою энергию обратно в электрический ток. Этот остаточный ток истощается сам по себе, проходя через светодиод D2, который находится справа.
Другими словами катушка способна запасать некоторое количество энергии в виде магнитного поля. Точно таким же образом конденсатор запасает энергию между двумя металлическими пластинами; разница состоит в том, что катушка сначала препятствует прохождению тока, а затем дает возможность ему протекать, а конденсатор вначале поглощает ток, а затем препятствует его прохождению.
Чем больше витков имеется в вашей катушке, тем большей индуктивностью она обладает, заставляя светиться светодиоды более ярко.
Для проверки вашего понимания фундаментальных основ электричества далее приведен один из последних вариантов данного эксперимента. Отключите резистор с сопротивлением 220 Ом и замените его резистором 1 кОм (чтобы защитить ваш светодиод при длительном пропускании электрического тока).
Отсоедините катушку и замените его конденсатором большой мощности порядка 4700 мкФ. (Будьте внимательны, чтобы соблюсти полярность его подключения). Что вы увидите, когда будете нажимать кнопку? Следует помнить, чтобы получить нужный эффект, вы должны удерживать кнопку нажатой буквально несколько секунд. А что вы увидите, когда отпустите кнопку? Следует помнить, что поведение конденсатора противоположно поведению катушки.
Концепция переменного тока
Рассмотрим простой воображаемый эксперимент. Предположим, что вы установили таймер 555 для передачи потока импульсов через катушку. Это примитивная форма переменного тока.
Вы можете представить, что индукция катушки будет влиять на поток импульсов в зависимости от их длительности и от величины индуктивности самой катушки. Если импульсы слишком короткие, то индукция катушки будет их блокировать. Может быть, если мы точно настроим длительность импульса, то она будет соответствовать постоянной времени катушки. В этом случае мы можем «настроить» катушку, чтобы она давала «частоте» проходить через себя.
А что случится, если мы заменим катушку конденсатором?
Когда импульсы будут иметь слишком большую длительность по сравнению с постоянной времени конденсатора, то он будет препятствовать их прохождению, потому что у него будет достаточно времени, чтобы полностью зарядиться. Но если импульсы короче, то конденсатор может заряжаться и разряжаться ритмично вместе с импульсами, и будет казаться, что он пропускает их через себя.
У меня нет места в данной книге, чтобы более глубоко описывать основы переменного тока. Это обширная и сложная область, где электричество ведет себя странным и замечательным образом, а математика, которая все это описывает, достаточно сложна, поскольку требует использования дифференциальных уравнений и мнимых единиц. Однако мы можем легко продемонстрировать эффект фильтрования звуковых частот динамика и катушки.
Эксперимент 29. ФИЛЬТРОВАНИЕ ЧАСТОТ
В данном эксперименте вы можете увидеть, каким образом индукция и емкость могут быть использованы для фильтрования звуковых частот. Мы собираемся построить разделительный фильтр — это простая схема, которая направляет низкие частоты в одну сторону, а высокие — в другую.
Вам понадобятся:
1. Динамик с сопротивлением 8 Ом, диаметром 5'' (127 мм). Количество — 1 шт. Пример такого динамика показан на рис. 5.35.

Рис. 5.35. Чтобы услышать результат работы звуковых фильтров, выполненных с использованием катушек и конденсаторов, вам потребуется динамик, который в состоянии воспроизводить низкие частоты. Этот динамик диаметром 5'' (127 мм) имеет минимально необходимый размер
2. Усилитель звуковой частоты TEA2025B компании STMicroelectronics или аналогичный ему (рис. 5.36). Количество — 1 шт.

Рис. 5.36. Эта микросхема содержит в себе стереоусилитель, который в состоянии выдавать на динамик сопротивлением 8 Ом сигнал мощностью 5 Вт, в том случае когда используются сразу два канала
3. Неполярные электролитические конденсаторы (которые также известны, как биполярные) емкостью 47 мкФ. Количество — 2 шт. Пример показан на рис. 5.37. Они должны иметь на корпусе «NP» или «BP», что означает «nonpolarized» (неполярный) или «bipolar» (биполярный).

Рис. 5.37. Неполярный электролитический конденсатор, который иногда называют биполярным конденсатором, выглядит точно так же, как и обычный полярный электролитический конденсатор, за исключением того, что на корпусе он имеет обозначение «NP» или «BP»
4. Неполярные электролитические конденсаторы емкостью 100 мкФ. Количество — 5 шт. Поскольку вы будете работать со звуковыми сигналами, которые являются переменными, т. е. то положительными, то отрицательными, вы не можете использовать обычные полярные электролитические конденсаторы.
Если вы хотите избежать проблем и затрат на неполярные конденсаторы, то можете заменить их двумя обычными электролитическими конденсаторами, которые должны быть подключены встречно последовательно с соединенными между собой отрицательными выводами. Надо всего лишь помнить, что емкость последовательно установленных конденсаторов суммарно будет равна половине емкости каждого отдельного компонента. Поэтому вам потребуется два обычных электролитических конденсатора емкостью 220 мкФ, соединенных последовательно для получения емкости 110 мкФ (рис. 5.38).
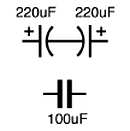
Рис. 5.38. Вы можете получить неполярный конденсатор, соединив два обычных электролитических конденсатора последовательно. (На самом деле это то, что вы обнаружите, если вскроете любой неполярный электролитический конденсатор). Символ в нижней части это просто примерное повторение двух символов, показанных вверху; имейте в виду, что два одинаковых конденсатора, соединенных последовательно, имеют общую емкость, которая равна половине каждого из них
5. Потенциометр со специальной характеристикой для аудиоустройств (audio taper potentiometer), если это возможно, сопротивлением 100 кОм. Количество — 1 шт.
6. Катушка для разделительного фильтра. Количество — 1 шт.
Вы можете поискать на интернет-аукционе eBay, используя ключевые слова «crossover» (разделитель) и «coil» (катушка), но если вы не можете найти ничего подходящего по разумной цене, то можно применить обычную катушку монтажного провода 20 AWG длиной 100 футов (30 м).
7. Пластиковая обувная коробка. Количество — 1 шт.
Порядок действий
Микросхема усилителя звуковой частоты предназначена для того, чтобы обеспечить достаточную мощность звука из вашего динамика. Динамик с диаметром диффузора 5'' (127 мм) нужен для того, чтобы иметь возможность услышать низкочастотный звук, который не могут воспроизводить те «детские» динамики, которые мы использовали ранее. Низкие частоты имеют большие длины волн, поэтому динамики малого размера не в состоянии воспроизводить их эффективно.
Может быть вы помните о том, что при монтаже системы охранной сигнализации динамик производил гораздо более мощный звук, если вы предотвращали распространение звука от задней части диффузора. Очевидный способ добиться этого — поместить динамик в коробку. Я предлагаю использовать пластиковую коробку, поскольку она дешевая и нам не нужно слишком хорошее качество звука, поскольку мы хотим всего лишь услышать какой-то низкочастотный звук. На рис. 5.39 показан динамик, закрепленный винтами в нижней части пластиковой коробки, а на рис. 5.40 эта же коробка в перевернутом виде после того, как ее крышка была установлена на место.

Рис. 5.39. Если вы хотите услышать низкие частоты из вашего динамика, то для этого необходима какая-нибудь резонансная оболочка. Дешевой пластиковой обувной коробки для демонстрации будет вполне достаточно

Рис. 5.40. Просверлите несколько отверстий диаметром 1/2'' (12 мм) в нижней части коробки, затем закрепите динамик на месте болтами, протянув провод через одно из отверстий в боковой части. Установите крышку и вы будете готовы для прослушивания звука, разумеется, не слишком высокого качества
Обычно динамик должен устанавливаться в корпусе из прочного толстого материала, который имеет очень низкие резонансные частоты, ниже предельного порога человеческого уха. Чтобы минимизировать резонанс коробки из-под обуви, вы можете добавить некоторое количество мягкой толстой ткани на внутреннюю ее поверхность до установки крышки. Полотенце для рук или какие-нибудь носки могут быть вполне приемлемыми для поглощения некоторых колебаний.
Добавление усилителя
Если вернуться обратно в 1950-е годы, вам для построения усилителя звуковой частоты разумеется понадобились бы вакуумные лампы, трансформатор и другие тяжеловесные энергоемкие компоненты. Сегодня вы можете купить микросхему стоимостью $1, которая с легкостью выполнит эту работу, если конечно вы добавите к ней еще несколько конденсаторов и регулятор уровня громкости. Микросхема TEA2025B, которую я рекомендую использовать, предназначена для изготовления недорогих кассетных плееров и CD-плееров и может работать в режиме стерео или моно от источника питания напряжением от 3 до 9 В. Чтобы выдать достаточную мощность на динамик сопротивлением 8 Ом два канала можно объединяют между собой. Таким образом при использовании напряжения 9 В микросхема может отдавать звуковую мощность, равную 5 Вт. Это конечно не тот звук, который можно сравнивать со стандартной системой для домашнего кинотеатра мощностью 100 Вт в каждом канале, но поскольку громкость имеет логарифмическую зависимость, 5 В будет вполне достаточно для того, чтобы сделать невыносимым пребывание любому члену семьи, который находится в той же или даже в соседней комнате.
Если вы не смогли найти микросхему TEA2025B, то можете использовать любую альтернативную, про которую сказано, что она является усилителем звуковой частоты. Попытайтесь найти ту, которая разработана для динамиков сопротивлением 8 Ом и выходной мощностью до 5 Вт в монорежиме. Проверьте по справочному листу технических данных где именно и какие конденсаторы окружения нужно установить. Это надо выполнить очень внимательно, поскольку некоторые конденсаторы не имеют маркировки полярности даже тогда, когда обладают достаточно большой емкостью, например, 100 мкФ. Эти конденсаторы должны функционировать вне зависимости от того, в каком направлении через них течет ток, поэтому в моей схеме на рис. 5.41 я их пометил «NP», что означает «nonpolarized» (неполярные). (В каталогах деталей вы можете встретить их обозначенными «bipolar» (биполярные) или «BP».)
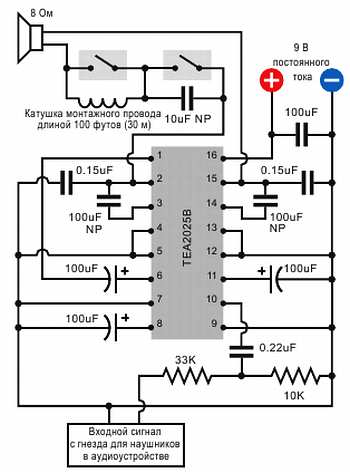
Рис. 5.41. К микросхеме усилителя должны быть подключены конденсаторы окружения, как это показано на рисунке; «NP» на схеме означает, что конденсатор неполярный. Также часто для обозначения таких конденсаторов используется сокращение «BP», означающее «bipolar» (биполярный). Для демонстрации фильтрования звуковых частот выходной сигнал с выводов 2 и 15 микросхемы может подаваться через катушку или неполярный конденсатор емкостью 10 мкФ
Как было указано ранее в перечне необходимых компонентов для этого эксперимента, чтобы получить тот же самый эффект, что и при использовании одного неполярного конденсатора емкостью 100 мкФ, вы можете последовательно подключить два обычных электролитических конденсатора емкостью 220 мкФ.
Для данного проекта очень важно на выходе источника питания добавить обычный электролитический сглаживающий конденсатор емкостью 100 мкФ. В противном случае усилитель будет воспринимать и, естественно, усиливать небольшие колебания напряжения в цепи.
Вход, который показан на схеме, может получать выходной сигнал от обычного плеера, например, портативного MP3-плеера, CD-плеера или кассетного плеера. Чтобы сигнал с гнезда для наушников подключить к макетной плате, вам понадобится применить адаптер, который преобразует контакты этого разъема в пару гнезд типа RCA и предоставляет возможность для подключения провода к одному из них, как это показано на рис. 5.42.

Рис. 5.42. Чтобы подключить выходной сигнал с гнезда наушников музыкального плеера, вы можете использовать данный адаптер и вставить зачищенный конец провода в одно из его гнезд. Затем следует использовать «крокодилы», чтобы подключить аудиосигнал к вашей макетной плате. Не забудьте применить дополнительный навесной провод для соединения общего контакта адаптера с минусовым выводом источника питания вашей макетной платы. Поскольку мы использовали только один динамик, то усилитель должен быть подключен только к одному стереовыходу вашего плеера. Другой выход игнорируется
Этот провод надо будет подключить к установленному на макетную плату резистору с сопротивлением 33 кОм. Хромированная часть гнезда RCA с небольшой площадкой (которая иногда покрыта золотом или, по меньшей мере, окрашена в золотистый цвет) должна быть подключена к минусовому выводу вашего источника питания на макетной плате; в противном случае вы ничего не услышите. Вы можете проигнорировать второй выход на адаптере, поскольку мы в данном случае используем не стерео-, а моносигнал.
Резистор с сопротивлением 33 кОм необходим для защиты усилителя от перегрузки. Если при использовании музыкального плеера будет недостаточно громкости, то сопротивление этого резистора надо будет уменьшить. А если же звуки будут иметь слишком большую громкость и искажения, то его надо будет увеличить. Кроме того, вы можете попробовать не включать или увеличить резистор с сопротивлением 10 кОм, который установлен за ним и добавлен для того, чтобы уменьшить фоновые шумы.
В верхней части схемы я нарисовал два переключателя: один предназначен для отключения (шунтирования) катушки, а другой для отключения (шунтирования) конденсатора. Вы можете вместо них использовать зажимы типа «крокодил», т. к. при этом вы легко могли бы сравнить звук от каждого из компонентов, установленных в схему.
На рис. 5.43 показана катушка, представляющая собой бобину монтажного провода. Красный и черный «крокодилы» оставлены незакрепленными на верхней части обувной коробки — они подключаются к выходу микросхемы (выводы 2 и 15). Выводы не имеют полярности; поэтому не важно какой вывод подключать к «крокодилам».

Рис. 5.43. Красный и черный «крокодилы», которые лежат на верхней части обувной коробки, должны быть подключены к выходу вашего усилителя. Провод с красным зажимом пропускает сигнал через катушку монтажного провода, когда сигнал проступает на динамик. Обратите внимание на изменения в звуке, когда вы будете подключать катушку
Перед тем как подать напряжение на схему начните с установки регулятора громкости на вашем источнике звука в положение минимальной громкости. Не удивляйтесь, если вы услышите гул или потрескивание, когда вы включите усилитель; он будет воспринимать любые паразитные напряжения, поскольку в этом простом эксперименте я не должен был предлагать вам экранирование входа. Поэтому усилитель может воспринимать любой шум, поскольку его провода «работают» как антенна.
Следует заметить, что вы можете получить дополнительный нежелательный звук, если вы будете использовать усилитель на поверхности из проводящего материала. Удалите любую алюминиевую фольгу или проводящую губку при монтаже данного проекта.
Убедитесь, что ваш плеер воспроизводит музыку, и медленно поворачивайте регулятор громкости до тех пор, пока вы не услышите ее. Если вы ничего не услышали, то надо проверить схему на наличие ошибок.
Теперь перейдем к более интересной части. Вставьте катушку монтажного провода длиной 100 футов (30 м) между одним из выходов усилителя и входом динамика (не имеет значение какого); если вы использовали переключатели, то разомкните переключатель, который выключает (шунтирует) катушку. Вы должны обнаружить, что в музыке пропала высокочастотная составляющая. Для сравнения отключите катушку и замените ее конденсатором емкостью 10 мкФ. При этом вы должны обнаружить, что в звуках музыки появились высокие нотки — это означает, что из сигнала исключена низкочастотная часть диапазона и остались только высокие частоты.
Вы только что проверили два очень простых фильтра. Теперь покажем, что они делают.
• Катушка является фильтром низких частот. Она пропускает низкие частоты, но препятствует прохождению высоких частот, поскольку аудиосигналы с коротким периодом не успевают преодолеть влияние индуктивности катушки. Катушка с большей индуктивностью устраняет более широкий диапазон частот.
• Конденсатор является фильтром высоких частот. Он пропускает высокие частоты и препятствует прохождению низких частот, поскольку более длительные периоды аудиосигналов могут зарядить емкость, что заставляет конденсатор останавливать пропускание тока. Конденсатор с меньшей емкостью устраняет более широкий диапазон частот.
В проектировании фильтров вы можете пойти дальше, используя сложные комбинации катушек и конденсаторов для преграждения частот в любой точке аудиоспектра. Поищите в Интернете любительские схемы фильтров звуковых частот и вы найдете сотни.
Разделительные фильтры
В традиционной аудиосистеме каждая колонка обычно содержит два выходных устройства — одно из них это небольшой динамик, воспроизводящий высокие частоты, который называют твитер (от англ. tweeter), а другой большой, воспроизводящий низкие частоты, который известен, как вуфер (от англ. woofer). (В современных системах вуфер часто удаляется из колонки и размещается в отдельном корпусе, который можно установить практически в любом месте, потому что ухо человека очень плохо определяет направление, в котором распространяются звуки низкой частоты.)
Схема, которую мы только что рассмотрели, а вы может быть смонтируете, известна, как разделительный фильтр. Истинных любителей звукотехники (аудиофилов) можно определить по конструкциям собственного изготовления (особенно в автомобильной системе), которые используют динамики по своему выбору и в корпусах, проектируемых и изготавливаемых ими самостоятельно.
Если вы хотите сделать разделительный фильтр, то вы должны использовать высококачественные полиэфирные конденсаторы (которые не имеют полярности, служат дольше, чем электролитические, и имеют лучшее качество изготовления), а также катушки, которые имеют точное число витков и такие размеры, чтобы они обрезали частоты в расчетной точке. На рис. 5.44 показан пример полиэфирного конденсатора.
На рис. 5.45 показана катушка для разделительного фильтра, которую я купил на интернет аукционе eBay за $6. Мне было любопытно узнать, что находится внутри нее, поэтому я купил две штуки, чтобы одна была в запасе.

Рис. 5.44. Некоторые электролитические конденсаторы не имеют полярности, например этот конденсатор на основе полиэфирной пленки. Однако они стоят существенно дороже и конденсаторы, у которых емкость более 10 мкФ, найти достаточно сложно

Рис. 5.45. Какие экзотические компоненты можно обнаружить внутри этого суперсовременного аудиокомпонента, который используется в сабвуфере для задерживания высоких частот?
Сначала я отрезал черную виниловую оболочку, в которую была упакована катушка. Внутри оказался обычный обмоточный провод — медный провод, покрытый тонким слоем шеллака[12] или полупрозрачного пластика, как это показано на рис. 5.46. Я размотал провод и сосчитал число витков. Затем я измерил длину провода и наконец с помощью микрометра измерил его диаметр, после чего я нашел в Интернете таблицу для перевода диаметра в милах (1/1000 доля дюйма) в американские калибры проводов (AWG).

Рис. 5.46. После удаления черной оболочки была обнаружена катушка из обмоточного провода
Что касается самой катушки, то она была из обычного пластика с «воздушным сердечником» — никакого железного или ферритового стержня в центре не было. На рис. 5.47 показаны катушка и провод.

Рис. 5.47. Катушка для разделительного фильтра звуковых частот состоит из пластиковой катушки и некоторого количества обмоточного провода, и ничего больше
Итак, приведем технические характеристики для данной катушки для схемы разделительного фильтра. Катушка содержит 40 футов (12 м) обмоточного одножильного провода 20 AWG, которым выполнено 200 витков вокруг пластиковой катушки толщиной 1/16'' (1,6 мм), с цилиндрической частью длиной 7/8'' (22 мм) между фланцами и с наружным диаметром 1/2'' (12,7 мм). Суммарная розничная цена материалов при заказе каждого компонента отдельно составляет приблизительно около $1, если предположить, что вы можете найти и изготовить катушку нужного размера самостоятельно.
В заключение. Существует очень много загадок, связанных с аудиокомпонентами. Очень часто их цена существенно завышена, но вы можете сделать свою собственную катушку, если начнете с использования данных параметров и подгоните их под свои потребности.
Предположим, что вы хотите установить мощные низкочастотные динамики в ваш автомобиль. Можете ли вы изготовить свой собственный фильтр таким образом, чтобы он пропускал только низкие частоты? Разумеется — вам всего лишь понадобится намотать катушку, добавляя какое-то количество витков до тех пор, пока она не станет отсекать верхние частоты на нужном уровне. Только проверьте, чтобы ваш провод был достаточно прочен, чтобы он не перегревался, когда вы будете пропускать по нему 100 или более ватт звуковой мощности.
Вот несколько другой проект, о котором я думаю — цветовой блок (блок «цветомузыки»). Вы можете подключиться к выходу вашего стереосигнала и использовать фильтры для разделения звуковых частот на три участка, каждый из которых будет зажигать набор светодиодов одного цвета. Красные светодиоды будут мигать при наличии низких частот, желтые при наличии частот среднего диапазона, а зеленые на высоких частотах (конечно, вы можете выбрать цвета в соответствии с собственными предпочтениями). Вы можете использовать импульсные диоды, подключенные последовательно со светодиодами, для того, чтобы выпрямлять переменный ток, и последовательно подключенные резисторы для ограничения падения напряжения на светодиодах, скажем, на уровне 2,5 В (когда регулятор громкости звука установлен в максимальное положение). Вы можете использовать ваш мультиметр для проверки тока, который проходит через каждый резистор, и умножить это число на падение напряжения на каждом резисторе, чтобы определить ту мощность, которая будет им рассеиваться, чтобы быть уверенным, что резистор будет в состоянии рассеивать такую мощность не перегорая.
Звуковоспроизведение это область техники, которая позволяет использовать все возможности для получения удовольствия при проектировании и монтаже электроники собственного изготовления.
Формы колебательных сигналов
Если вы подуете вдоль верхней поверхности горлышка бутылки, то услышите звук, который вызван воздухом, вибрирующим внутри бутылки, и, если у вас была бы возможность увидеть эти звуковые волны, то вы бы получили характерную кривую.
Если у вас есть время, чтобы нарисовать график переменного напряжения, которое имеется в любой сетевой розетке вашего дома, то вы обнаружите точно такую же кривую.
Если бы вы могли измерить скорость маятника, медленно колеблющегося в вакууме, и нарисовали бы графики скорости в зависимости от времени, то у вас снова бы получилась та же самая кривая.
Такая кривая называется синусоидой; она так названа, поскольку ее можно найти в основах тригонометрии. В прямоугольном треугольнике синус угла определяют как отношение длины стороны, которая находится напротив этого угла, к длине гипотенузы (стороне, которая лежит напротив прямого угла треугольника).
Чтобы объяснить еще проще, представим небольшой шарик, который закреплен на струне и вращается вокруг некоторой центральной точки, как это показано на рис. 5.48.
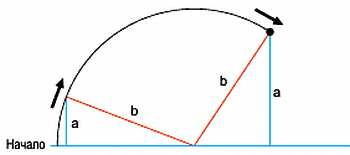
Рис. 5.48. Если груз на конце струны (отрезок b на рисунке) совершает круговые движения с постоянной скоростью, то расстояние от груза до горизонтальной линии, проходящей через центр круга (отрезок a на рисунке), может быть нарисовано в виде графика в зависимости от времени. График будет называться синусоидой, поскольку в тригонометрии отношение a/b носит название синус угла, который находится между отрезком b и горизонтальной линией, проведенной через центр вращения. Нас повсюду окружают волны и сигналы синусоидальной формы, особенно это касается звуковоспроизведения и генерирования переменного тока
Следует пренебречь силой тяжести, сопротивлением воздуха и другими «мешающими» факторами. Просто измерим высоту шара по вертикали и разделим ее на длину струны через определенные одинаковые промежутки времени, по мере того, как шарик вращается по кругу с постоянной скоростью. Нанесем результат на график — и снова у нас получится синусоида, которая показана на рис. 5.49. Следует заметить, что шарик вращается и далее, т. е. ниже своего начального положения, мы считаем, что это расстояние отрицательное, поэтому синусоида тоже становится отрицательной.
Рис. 5.49. Здесь показано, как выглядит «чистая» (беспримесная) синусоида
Почему эта специфическая кривая возникает в столь многих местах и проявляется в природе? Причины лежат в законах физики, но я оставляю вам возможность самостоятельно «копать» в направлении этой темы, если она вас, конечно, заинтересовала. Возвращаясь обратно к нашему предмету — воспроизведению звука — отметим здесь самое важное:
• Любой звук может быть разделен на ряд синусоидальных сигналов, которые отличаются между собой по частоте и амплитуде.
И, наоборот:
• Если вы смешаете вместе отдельные синусоидальные сигналы, то можете создать практически любой звук.
Предположим, что у вас имеются два синусоидальных звука, которые воспроизводятся одновременно. На рис. 5.50 (ЦВ-рис. 5.50) один звук показан кривой красного цвета, а другой голубого. Когда оба звука распространяются в виде звуковых волн по воздуху или в виде переменных электрических токов по проводу, амплитуды волн добавляются друг к другу и получается более сложная кривая, которая на рисунке показана черным цветом. Теперь попытайтесь представить десятки или даже сотни различных частот, которые добавляются друг к другу, и в результате получите сложный колебательный сигнал музыкального произведения.
Рис. 5.50. Когда одновременно генерируются два синусоидальных колебательных сигнала (например, двумя музыкантами, каждый из которых играет на флейте), то комбинированный звук создает некоторую суммарную кривую. Голубая синусоида имеет в два раз большую частоту, чем красная. Суммарная кривая (черная линия) представляет собой сумму амплитуд составляющих сигналов, т. е. сумму расстояний от горизонтальной оси до синусоидальных сигналов
Вы можете с помощью таймера 555, работающего в автоколебательном режиме, создать свой собственный колебательный сигнал и подать его на вход вашего усилителя звуковой частоты, как это показано на рис. 5.51. Вы должны быть внимательными, чтобы не перегрузить вход усилителя. Обратите внимание на последовательно подключенный резистор с сопротивлением 680 кОм на выходе таймера, а также на потенциометр номиналом 500 Ом.
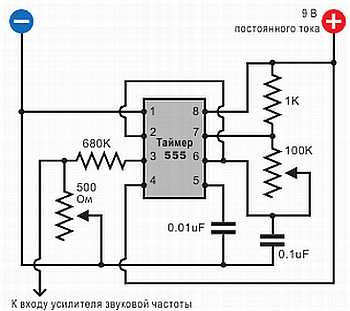
Рис. 5.51. Таймер 555, подключенный по схеме в автоколебательном режиме, используется для генерирования слышимых частот в широком диапазоне, при выполнении их регулировки с помощью потенциометра с сопротивлением 100 кОм. После уменьшения мощности выходного сигнала с помощью выходного делителя он может быть подан на используемую ранее микросхему усилителя
Отсоедините ваш музыкальный плеер и подключите выход таймера 555 к входу усилителя (к резистору с сопротивлением 33 кОм), который был показан ранее на рис. 5.41. Вы не должны беспокоиться о подключении таймера к отдельному источнику питания, поскольку обе схемы располагаются на одной макетной плате и могут использовать один источник.
Перед включением следует убедиться, что регулятор потенциометра номиналом 500 Ом повернут до предела, когда его сопротивление будет минимально. Этот потенциометр функционирует, как регулятор громкости. Кроме того, следует убедиться, что регулятор другого потенциометра с сопротивлением 100 кОм находится в среднем положении. После этого включите напряжение питания и медленно начинайте вращать потенциометр с сопротивлением 500 Ом до тех пор, пока не услышите звук.
Теперь выполните регулировку другим потенциометром с сопротивлением 100 кОм, чтобы получить звук низкой частоты. Вы наверняка услышите, что звук не является «чистым». В нем присутствует некоторое количество мешающих обертонов[13] (гармоник). Это связано с тем, что таймер 555 генерирует сигналы прямо угольной (рис. 5.52), а не синусоидальной формы.
Рис. 5.52. Выходной сигнал таймера 555 это всегда сигнал с двумя состояниями «включено» или «выключено» и с очень коротким временем перехода между ними. В результате получается сигнал почти идеальной прямоугольной формы. Теоретически вы можете разложить этот сигнал на сложный набор синусоидальных сигналов разной частоты. Человеческое ухо воспринимает входящие в прямоугольный сигнал высокие частоты как неприятные обертона
Прямоугольные сигналы это всегда сумма различных синусоидальных сигналов, некоторые из которых имеют достаточно высокую частоту. Ваше ухо слышит эти гармоники даже тогда, когда их в прямоугольном сигнале явно не видно.
Подключите один из контактов вашего динамика через катушку, выполненную из монтажного провода, и вы должны услышать значительно более чистый звук, поскольку мешающие высокие частоты отсекаются индуктивным сопротивлением катушки. Отключите катушку и замените ее конденсатором емкостью 10 мкФ, теперь вы должны услышать больше призвуков и меньше низких частот.
Вы только что сделали маленький шаг по направлению к синтезированию звуков. Если этот предмет интересует вас, то вы можете поискать в Интернете схемы таких генераторов. Для более полного понимания соотношения между колебательными сигналами и звуками, которые вы слышите, требуется осциллограф, способный показать истинную форму того сигнала, который вы генерируете и изменяете.
Эксперимент 30. ФУЗЗ
Теперь попробуем сделать некоторые изменения в схеме, используемой в эксперименте 29. Это даст нам возможность продемонстрировать другую фундаментальную звуковую характеристику — искажение.
Вам понадобятся:
1. Еще один потенциометр с сопротивлением 100 кОм.
2. Стандартные n-p-n-транзисторы типа 2N2222 или аналогичные ему. Количество — 2 шт.
3. Набор резисторов и конденсаторов.
Ограничение сигналов
На ранних стадиях развития звуковой технологии «hi-fi» (высококачественного звуковоспроизведения) инженеры в основном работали над улучшением процесса воспроизведения звука. Они хотели на выходе усилителя получать сигналы, идентичные по форме сигналам на его входе с единственной разницей, чтобы на выходе сигналы были большей мощности, достаточной для воспроизведения с помощью мощных звуковых колонок. Даже очень небольшие искажения формы сигнала были неприемлемы.
Несколько позднее они поняли, что их прекрасно сконструированные ламповые усилители будут жестоко эксплуатироваться новым поколением рок-гитаристов, в задачу которых входило создание именно максимально большого объема искажений.
Наиболее часто встречающееся искажение сигнала волновой формы известно под таким техническим термином, как ограничение (clipping). Если вы для усиления синусоидального сигнала используете вакуумную лампу или транзистор при предельно допустимых значениях сигналов для данных компонентов, то это приводит к «обрезанию» (ограничению) максимумов и минимумов кривой входного сигнала. Таким образом, синусоидальные сигналы начинают выглядеть подобно прямоугольным сигналам. А как это было объяснено ранее в разделе, посвященном формам колебательных сигналов, прямоугольные сигналы создают неприятный дребезжащий звук. Для рок-гитаристов, которые пытаются добавить остроты в свою музыку, резкость звучания как раз и является желаемой.
Первое устройство, которое предоставило эту возможность на коммерческой основе, было известно, как «fuzz box» (блок фузза), которое принудительно обрезало сигнал на входе. Один из первых образцов фузза приведен на рис. 5.53, а ограничение синусоидального сигнала показано на рис. 5.54.

Рис. 5.53. Эта педаль Vox Wow-Fuzz была одним из первых ножных устройств, специально добавляющих определенные искажения, которые инженеры, занимающиеся звуковоспроизведением, пытались убрать из звука в течение многих десятков лет
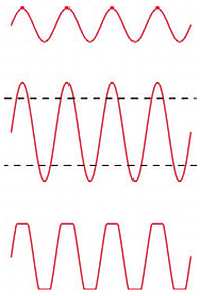
Рис. 5.54. Когда синусоидальный сигнал (вверху) проходит через усилитель, который настроен так, что его компоненты вносят искажения (показаны пунктирной линией в центре), усилитель обрезает синусоидальный сигнал (показан внизу) в результате процесса, который известен, как ограничение сигнала (clipping). В результате на выходе устройства получается сигнал, близкий к прямоугольному сигналу. В этом-то и заключается основной принцип работы фузза (fuzz), создающего резкое звучание гитары
Схема
На выходе таймера 555 имеется прямоугольный сигнал, поэтому звук уже становится действительно несколько нечетким «fuzzy», но мы можем сделать этот эффект более интенсивным, чтобы продемонстрировать принцип ограничения сигнала. На рис. 5.55 я заново привел всю схему, поскольку несколько ее компонентов были заменены. Принципиальное отличие этой схемы от предыдущей заключается в добавлении двух транзисторов n-p-n-типа.
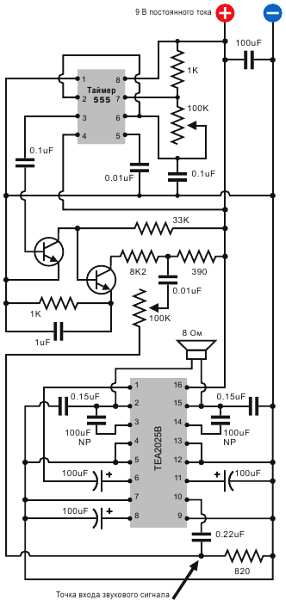
Рис. 5.55. Для быстрой демонстрации ограничения сигнала нужно добавить пару транзисторов между выходом таймера 555 и входом микросхемы усилителя. Один транзистор управляет другим, поэтому, когда вы будете выполнять регулировку потенциометром, расположенным в центре схемы, то вы должны будете услышать возрастающий грубый (резкий) искаженный звук
Если вы будете собирать эту схему на вашей макетной плате, то имейте в виду, что резисторы с сопротивлением 33 кОм и 10 кОм, показанные ранее в нижней части схемы усилителя, были удалены, а на их месте остался резистор с сопротивлением 820 Ом. Нижний по схеме вывод конденсатора емкостью 0,22 мкФ по-прежнему является входом усилителя и, если вы внимательно посмотрите на схему, то в ее середине обнаружите, что эта точка подключена к потенциометру с сопротивлением 100 кОм. Этот потенциометр ваш «регулятор фузза» (fuzz adjuster).
Два n-p-n-транзистора расположены таким образом, что на тот, который слева, поступает выходной сигнал таймера 555. Этот сигнал управляет коллекторным током, протекающим через транзистор и резистор с сопротивлением 33 кОм. Этот ток в свою очередь управляет базой правого транзистора, а ток, проходящий через него, фактически управляет усилителем.
Когда вы включите напряжение питания схемы, то для настройки частоты генерируемого сигнала (как и ранее) следует использовать потенциометр с сопротивлением 100 кОм, подключенный к таймеру 555. Затем, чтобы услышать каким образом он вносит свой «вклад» в звук, надо повернуть потенциометр «регулятор фузза» до тех пор, пока звук станет совершенно невыносимым. Два транзистора служат усилителями.
Конечно, нам не нужно, чтобы входной уровень микросхемы усилителя выходил за допустимые пределы. Задачей левого транзистора является перегрузка правого транзистора для создания эффекта «фузза». И когда вы «регулятором фузза» изменяете выходной сигнал с транзисторов, моментально возникает перегрузка всей микросхемы усилителя, создавая большее искажение.
Если вы хотите более точно настроить выходной сигнал, то попробуйте поменять номиналы резистора с сопротивлением 1 кОм и конденсатор емкостью 1 мкФ, которые расположены между эмиттером правого транзистора и отрицательным выводом источника питания. При увеличении значения этого сопротивления транзистор будет перегружаться в меньшей степени. Различные емкости конденсатора будут делать звук более или менее резким.
В Интернете вы безусловно сможете найти тысячи схем подобных устройств, которые изменяют звук гитары. Та схема, которую я рассмотрел, одна из самых простых. Если же вы хотите что-нибудь универсальное, то должны сделать запрос в поисковой программе — «схемы педалей для электрогитар» (stomp box schematics) и посмотреть, что она вам выдаст.
История появления педалей для электрогитар
Группа Ventures записала свой первый сингл с использованием фузза еще в 1962 году, он назывался «The 2000 Pound Bee». Это была поистине одной из самых ужасных обработок, которые когда-либо производились, в ней в качестве новинки использовались искажения и сделана она была так, что другие музыканты не восприняли эту концепцию серьезно.
Рей Дэвис (Ray Davies) из группы Kinks был первым, кто сделал искажения частью музыки. В начале Дэвис делал это во время записи своего хита «You Really Got Me», периодически подключая выход одного усилителя ко входу другого. Эта перегрузка входа и ограничение звуковых сигналов основная концепция фузза. Через некоторое время после этого Кейт Ричардс (Keith Richards) использовал устройство Gibson Maestro Fuzz-Tone, когда группа «Ролинг Стоунз» (Rolling Stones) в 1965 году записала композицию «(I Can't Get No) Satisfaction».
Сегодня можно найти тысячи адвокатов, которые поддерживают различные мифы об «идеальном» искажении.
В рис. 5.56 я привел схему от Флавио Делепьяне (Flavio Dellepiane), итальянского разработчика схем, который разместил свою работу (с небольшой помощью от Google AdSense) на сайте http://www.redcircuits.com.
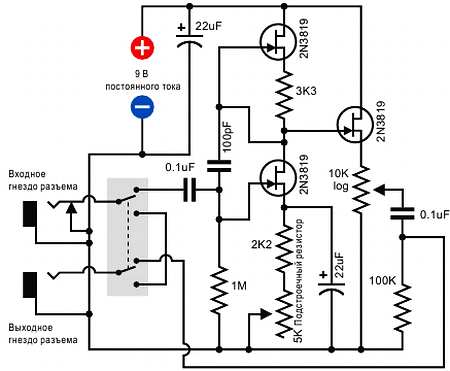
Рис. 5.56. В этой схеме, разработанной Флавио Делепьяне (Flavio Dellepiane), используются три транзистора для моделирования искажений, которые применяются при создании перегрузки входа лампового усилителя
Делепьяне — самоучка, который большую часть своих знаний получил из журналов по электронике, как например, British Wireless World.
В его схеме фузза используется усилитель с очень большим коэффициентом усиления, состоящим из трех полевых транзисторов, которые очень близко имитируют стандартный прямоугольный сигнал при перегрузке лампового усилителя.
На своем сайте Делепьяне предлагает десятки схем, которые были разработаны и протестированы им с помощью двухлучевого осциллографа, генератора синусоидальных сигналов с очень низким коэффициентом искажения (поэтому он может подать на вход аудиоустройств «чистый» входной сигнал), устройства для измерения искажений и прецизионного вольтметра, измеряющего напряжения в звуковом диапазоне частот.
Причем вольтметр и генератор сигналов были изготовлены по его собственному проекту и он приводит схемы и этих устройств. Таким образом, его сайт предоставляет услуги по приобретению всего необходимого для тех любителей электроники, которые ищут возможности для самообразования.
Раньше фузза было разработано такое устройство, как тремоло (tremolo). Очень многие путают его с другим устройством — вибрато (vibrato), поэтому давайте выясним разницу между ними, не откладывая.
• Вибрато, примененное к звуку, делает его часто меняющимся по тону выше и ниже. Это выглядит так, как будто гитарист изгибает струны соответствующим образом.
• Тремоло, примененное к звуку, меняет его громкость. Это выглядит так, как будто кто-то очень быстро регулирует громкость гитары, делая ее громче и тише.
Гарри ДеАрмонд (Harry DeArmond) сделал первый блок тремоло, который он назвал Trem-Trol. Он выглядел как антикварное переносное радио, которое имело два регулятора на передней панели и ручку для переноски сверху. Возможно, для уменьшения расходов ДеАрмонд не использовал каких-либо электронных компонентов. Его устройство Trem-Trol в стиле паропанк[14] содержало установленный двигатель, у которого имелся конический вал и резиновое колесо, оказывающее давление на этот вал. Скорость колеса изменяется при повороте ручки для изменения положения вверх и вниз по валу. Колесо в свою очередь вращает небольшую капсулу с «гидрожидкостью», в которую опущены два провода, передающие аудиосигнал. По мере того как капсула качается вперед и назад, жидкость переливается из стороны в сторону и сопротивление между электродами меняется. Это приводит к модуляции звукового сигнала на выходе.
Сегодня такие устройства, как Trem-Trol, представляют собой антикварную ценность для коллекционеров. Когда промышленный дизайнер Дэн Формоза (Dan Formosa) заполучил одно из таких устройств, он разместил его фотографию в Интернете по адресу http://www.danformosa.com/dearmond.html.
А Джон Буркард (Johann Burkard) выложил файл в формате MP3 со своим использованием устройства DeArmond Trem-Trol, и вы можете его прослушать по адресу в Интернете: http://johannburkard.de/blog/music/effects/DeArmondTremoloControlclip.html.
Идея механического устройства для формирования электронного звука на этом не закончилась. Оригинальное устройство Хаммонда (Hammond) создает свой уникальный насыщенный звук от набора зубчатых колес, которые вращаются двигателем. Каждое колесо создает переменную индуктивность в датчике, который точно такой же, как записывающая головка в кассетном плеере.
Очень легко понять и другие возможности педальных устройств с приводами от двигателей. Возвращаясь назад к тремоло: представим прозрачный диск с маской, выполненной с помощью черной краски, которой покрыт диск, за исключением круговой полоски в его середине, сужающейся у каждого конца (рис. 5.57). При вращении диска свет от светодиода через прозрачную полоску будет проходить по направлению к фоторезистору — вот и все основное, что нужно, для получения тремоло-устройства.
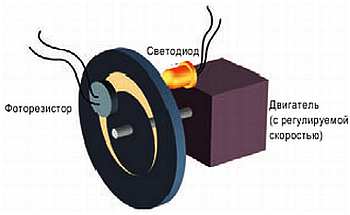
Рис. 5.57. Хотя электромеханические устройства в настоящее время устарели, некоторые неиспользованные возможности все еще существуют. Эта конструкция, если у кого-либо хватит терпения ее изготовить, способна создать раз личные эффекты тремоло
Вы можете даже получить никогда ранее неизвестные эффекты тремоло, раскрашивая диски и оставляя полоски различной конфигурации (рис. 5.58).

Рис. 5.58. Для создания эффекта тремоло в воображаемом электромеханическом устройстве, которое показано на рис. 5.57, могли бы быть использованы различные рисунки полосок на прозрачном диске
Кстати, в качестве по-настоящему сложной задачи, как насчет устройства для автоматической замены таких дисков?
Сегодня гитаристы могут выбирать среди «шведского стола» эффектов, которые практически все могут быть изготовлены в домашних условиях с использованием схем, доступных в Интернете. Для справки посмотрите следующие специальные книги.
• Analog Man's Guide to Vintage Efects, by Tom Hughes (For Musicians Only Publishing, 2004) — (Том Хьюджес. Аналоговое руководство по эффектам Vintage. — For Musicians Only Publishing, 2004). В этом руководстве приведены все устройства педалей для эффектов Vintage и педалей, которые вы даже представить себе не можете.
• How to Modify Efect Pedals for Guitar и Bass, by Brian Wampler (Custom Books Publishing, 2007) — (Брайан Вамплер. Как изменить действие педалей для гитары и бас-гитары. — Custom Books Publishing, 2007). Это очень подробное руководство для начинающих, обладающих небольшим опытом или вообще не имеющих такового. В настоящее время его можно загрузить только с таких веб-сайтов, как http://www.openlibrary.org, но вы можете найти ранее напечатанное издание в букинистических магазинах, если будете искать по заголовку и автору.
Конечно, вы всегда можете поступить проще, выложив пару сотен долларов и заказав имеющиеся в наличии изделия, например Boss ME-20, которое используется для цифровой обработки с целью эмуляции искажений, металлических звуков, фузза, хора, фазовращателя, фланжера, тремоло, задержки, реверберации и еще некоторых других функций, и все это в удобной многопедальной конструкции. Конечно, истинные фанаты скажут, что это «не одно и то же», но может быть дело вовсе не в этом. Некоторые из нас не могут получить удовлетворения до тех пор, пока не смонтируют свое собственное педальное устройство и не настроят его в поисках звука, который не имеется в наличии на полках магазинов и полностью принадлежит нам.
Эксперимент 31. НИКАКОЙ ПАЙКИ, НИКАКОГО ИСТОЧНИКА ПИТАНИЯ — ТОЛЬКО ОДНО РАДИО!
Теперь пришло время еще раз вернуться к индуктивности и емкости, чтобы продемонстрировать приложение, в котором используется способ смешивания колебательных сигналов друг с другом. Я хочу продемонстрировать вам простейшую схему без источника питания вообще, и которая может принимать сигналы AM-радио и делать его слышимым. Такое простейшее устройство традиционно известно, как детекторный радиоприемник или кристаллическое радио, поскольку в схему входит германиевый диод, внутри которого находится кристалл. Идея относится к началу развития радио, но если вы не попытаетесь осуществить ее, то не приобретете опыт, который поистине является магическим.
Вам понадобятся:
1. Жесткий цилиндрический объект, например, баночка из-под витаминов. Количество — 1 шт.
2. Одножильный монтажный провод 22 AWG (диаметром 0,64 мм). Количество — 60 футов (18 м).
3. Многожильный провод 16 AWG. Количество — 100 футов (30 м).
4. Полипропиленовый шпагат («poly rope») или нейлоновый шпагат. Количество — 10 футов (30 м).
5. Германиевый диод. Количество — 1 шт.
6. Наушники с высоким импедансом. Количество — 1 шт.
Диод и наушники можно заказать на веб-сайте http://www.scitoyscatalog.com.
Вы не можете использовать современные наушники, например те, которые продаются в комплекте с MP3-плеером. Некоторые из этих позиций показаны на рис. 5.59.

Рис. 5.59. К всему этому просто добавьте провод и катушку и это будет все, что нужно для приема сигналов АМ-радио. Черный диск становится регулятором настройки после того, как он будет прикреплен к переменному конденсатору (справа). Это на самом деле избыточная добавка. Германиевый диод (в центре) осуществляет выпрямление радиосигнала. Наушник с большим значением сопротивления (в верхней части рисунка, желтого цвета) создает хорошо различимый на слух звук
Сначала вам нужно будет сделать катушку. Она должна иметь в диаметре порядка 3'' (76,2 мм) и вы можете намотать ее вокруг пустой стеклянной или пластиковой емкости такого размера, при условии, что она обладает достаточной прочностью. Тонкая бутылка из-под пепси-колы или минеральной воды не подходит, потому что суммарные усилия при намотке витков могут привести к деформированию бутылки, что лишит ее цилиндрической формы.
Я выбираю бутылку из-под витаминов, которая оказалась нужного размера. Чтобы снять наклейку я растворил ее клей, разогрев его промышленным феном (слегка позволив расплавится бутылке), а затем просто снял наклейку. Остатки клея я удалил ксилолом (он также известен, как диметилбензол). Это удобный растворитель, который можно найти где угодно, поскольку он удаляет пятна от «несмываемого» маркера так же хорошо, как и остатки наклеек, но при этом всегда нужно пользоваться латексными или нитриловыми перчатками, чтобы избежать попадания этого вещества на кожу, и минимизировать время вдыхания его паров, поскольку ксилол может оказать не слишком благоприятное влияние на ваши легкие.
После того как вы подготовили чистую и прочную бутылку, нужно просверлить в ней две пары отверстий, как это показано на рис. 5.60. Вы будете в дальнейшем использовать их для фиксации концов катушки.

Рис. 5.60. Большая пустая бутылка из-под витаминов диаметром 3'' (76,2 мм) представляет собой идеальный каркас для катушки детекторного приемника. Просверленные отверстия будут удерживать провод, намотанный на бутылке
Теперь вам понадобится порядка 60 футов (18 м) одножильного провода 22 AWG (диаметром 0,64 мм). Если вы используете обмоточный провод, то его тонкая изоляция позволит выполнить намотку витков более плотно и катушка окажется несколько более эффективной. Но и обычный провод с виниловой изоляцией тоже в состоянии хорошо выполнить эту работу и при этом с ним гораздо легче обращаться.
Начать следует с того, чтобы удалить изоляцию с одного конца провода длиной порядка 6'' (15,2 см). Теперь надо отмерить 50'' (127 см) изолированного провода и надрезать изоляцию провода (нужно стараться, чтобы не перерезать его).
Снимите изоляцию, очистив около 1/2'' (12,7 мм) оголенного провода, как это показано на рис. 5.61. Согните его в центральной точке и сверните в петлю, как на рис. 5.62.

Рис. 5.61. Кусачки для удаления изоляции очищают одножильный провод 22 AWG через равные интервалы

Рис. 5.62. Каждая оголенная часть провода согнута в петлю с помощью тонкогубцев
Вы только что сделали «отвод», что означает точку, которой вы сможете подключиться к части катушки после того, как ее намотаете. Вам потребуется сделать еще 11 таких отводов, которые должны находиться друг от друга на расстоянии 50'' (127 см). (Если диаметр бутылки, который вы используете в качестве каркаса, не равен 3'' (76,2 мм), то умножьте этот диаметр на 16, чтобы получить приблизительно необходимое расстояние между отводами).
После того как вы сделаете 12 отводов, нужно отрезать провод и очистить от изоляции около 6'' (152,4 мм) на образовавшемся конце. Теперь согните конец провода в форме буквы U, чтобы диаметр был приблизительно 1/2'' (12,7 мм) таким образом, чтобы вы могли вставить этот крючок в пару отверстий, которые вы просверлили на другом конце бутылки. Протяните провод еще раз, чтобы сделать еще одну петлю и тем самым получить надежную точку крепления конца провода.
Теперь намотайте оставшийся провод вокруг бутылки так, чтобы витки были уложены плотно друг к другу. Когда вы доберетесь до другого конца провода, то вставьте его в другую пару отверстий, чтобы выполнить крепление так, как показано на рис. 5.63. Полностью изготовленная катушка показана на рис. 5.64.

Рис. 5.63. Оголенный конец провода зафиксирован в отверстиях, просверленных в бутылке

Рис. 5.64. Выполненная катушки с плотной намоткой провода вокруг бутылки
Ваш следующий шаг должен заключаться в установке антенны. Если вы живете в доме с задним двором, то это сделать очень просто: нужно просто открыть окно, выбросить кольцо провода 16 AWG и зафиксировать свободный конец, а затем выйти наружу и подтянуть вашу антенну с помощью полипропиленового или нейлонового шпагата, который можно приобрести в любом хозяйственном магазине, чтобы закрепить провод на любом подходящем дереве, водосточной трубе или мачте (рис. 5.67).
Общая длина провода должна быть порядка 100 футов (30 м). В том месте, где он проходит через окно, ее надо подвесить с помощью другого куска шпагата. Идея состоит в том, чтобы ваша антенна находилась как можно дальше от земли или от любого заземленного объекта, насколько это возможно.
Если вы живете в квартире, где нет выхода во двор, то вы можете попытаться развернуть антенну внутри комнаты, подвешивая провод большим количеством кусков шпагата. Антенна должна быть длиной приблизительно 100 футов (30 м), но очевидно, что она не должна располагаться по прямой линии.
Присоедините свободный конец антенны к одному концу вашей катушки. В этой же точке нужно добавить германиевый диод, который работает аналогично кремниевому диоду, но больше подходит для напряжения и тока небольшой амплитуды, с которыми вы и будете иметь дело. Другой вывод диода нужно подключить к одному из проводов, который соединяется с наушником, обладающим большим сопротивлением.
Высокое напряжение!
Мир вокруг нас заполнен электричеством. Обычно мы не боимся его, но гроза это внезапное напоминание, что существует огромная разность потенциалов между землей под ногами и облаками над головой. Если вы сделали наружную антенну, никогда не пользуйтесь ей, если есть хоть какая-то вероятность попадания молнии. Это может оказаться чрезвычайно опасным. Отсоедините наружную часть вашей антенны, отведите в сторону и заземлите конец, чтобы сделать ее безопасной
Обычные современные телефоны или наушники не будут работать в такой схеме.
Другой провод от наушника подключается к проводной перемычке, второй конец которой может быть подключен к любому из отводов на вашей катушке.
Одно последнее усовершенствование и вы будете готовы настраивать радио. Вы должны заземлить точку соединения перемычки с проводом наушника. Под этим я понимаю подключение к чему-либо, что действительно находится в контакте с землей. Наиболее часто упоминаемая для этого возможность — труба для подачи холодной воды, но только в том случае, если труба металлическая.
Поскольку в настоящее время большинство сантехнических труб выполняется из пластика, то перед тем, как использовать водопроводный кран в качестве заземления, надо убедиться, что у вас дома именно металлические (медные) трубы.
Другой возможностью является крепление провода винтом к крышке, которая закрывает электрическую розетку, поскольку электрическая система в вашем доме должна быть обязательно заземлена. Но самый безошибочный способ получить отличное заземление это выйти из помещения и вбить молотком полосу с медным покрытием длиной 4 фута (1,3 м) в достаточно увлажненный участок земли. Любой электрический супермаркет может продать вам такую полосу. Они обычно используются для заземления сварочного оборудования.
На рис. 5.65 и 5.66 показаны схемы окончательно собранного простейшего детекторного радиоприемника.
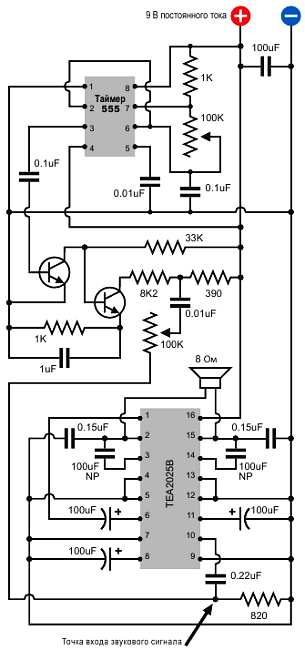
Рис. 5.65. Сигнал от антенны может проходить через катушку на землю. Если проводная перемычка будет присоединена к соответствующему отводу на катушке, то она будет попадать в резонанс с радиосигналом. Этого будет вполне достаточно, чтобы запитать наушник, который должен быть последовательно подсоединен к диоду
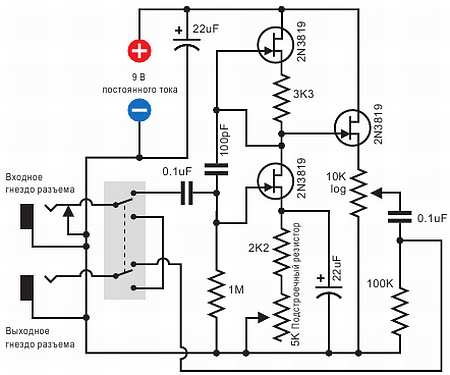
Рис. 5.66. Реальная версия простейшего радиоприемника, монтажная схема которого показана на рис. 5.65
Если вы правильно следовали всем инструкциям, то наступило время для настройки вашего простейшего радиоприемника на ближайшую станцию. Переместите «крокодил» на конце вашей проводной соединительной перемычки от одного отвода на катушке к другому. В зависимости от того места, где вы проживаете, вы сможете поймать по крайней мере одну или несколько станций, некоторые из которых будут ловиться одновременно.
Может показаться, что вы получили нечто материальное буквально из ничего, поскольку наушник выдает звук без какого-либо дополнительного источника энергии (рис. 5.67).
Рис. 5.67. Получаем наслаждение от приема радиосигнала с помощью набора очень простых компонентов и при этом не требуется никакого дополнительного источника энергии
На самом деле здесь есть источник энергии: передатчик, расположенный на радиостанции. Большой усилитель рассеивает мощность с передающей башни, модулируя ее с фиксированной частотой. Когда соединение вашей катушки и антенны попадет в резонанс с этой частотой, вы получите вполне достаточное напряжение и ток, чтобы запитать наушник с высоким значением сопротивления.
Причина, по которой вы должны выполнить хорошее заземление, заключается в том, что радиостанция передает свой сигнал под напряжением относительно Земли. Земля замыкает цепь между вами и передатчиком. Для получения более подробной информации об этой и других концепциях, связанных с радио, смотрите следующий далее разд. «Теория — Как работает радио».
Улучшения
Чем выше ваша антенна, тем лучше она должна работать. В том месте, где живу я, это не такая большая проблема, потому что я живу в пустыне без каких-либо деревьев в округе. Поэтому только лишь натянув провод с помощью шпагата от моего окна к переднему бамперу моего автомобиля, мне удалось получить достаточно качественный прием радиосигнала.
Чтобы улучшить избирательность радиоприемника, вы можете добавить переменный конденсатор, как это показано в следующем теоретическом разделе. Это позволит вам «настраивать» резонанс вашей схемы более точно. Переменные конденсаторы в настоящее время штука редкая, но вы можете найти некоторые из них на специальном ресурсе, который я рекомендовал для приобретения наушника и германиевого диода — это каталог Scitoys Catalog (http://www.scitoyscatalog.com).
Этот ресурс поддерживается замечательным человеком по имени Саймон Квеллан Филд (Simon Quellan Field), чей сайт предлагает много забавных проектов, которые вы можете реализовать в вашем доме. Одной из его замечательных идей является удаление германиевого диода из схемы радиоприемника и замена его маломощным светодиодом с последовательно подключенной батарейкой на 1,5 В. Это не годится для меня, потому что я живу в 40 милях (около 65 км) от ближайшей радиостанции, вещающей в АМ-диапазоне. Если же вы находитесь ближе к передатчику, то можете увидеть как светодиод будет менять интенсивность свечения по мере того, как энергия от радиопередатчика будет проходить через него.
Как работает радио
Когда частота электрического сигнала очень высока, то излучение, которое создается, имеет достаточно энергии, чтобы распространяться на многие мили. Принцип радиопередачи заключается в следующем: высокочастотное напряжение подается на передающую антенну относительно Земли.
Когда я говорю «земля», то в данном случае это буквально означает планету у нас под ногами. Если вы установили приемную антенну, то она может принимать слабый, передаваемый относительно Земли, сигнал — будто бы Земля является одним большим проводником. На самом деле Земля настолько велика и содержит настолько большое количество электронов, что она может функционировать как один общий накопитель, как гигантская версия шкафа с папками, которого, как я полагаю, вам следует коснуться, чтобы снять статическое электричество с вашего тела, перед тем как коснуться логической микросхемы, изготовленной по КМОП-технологии.
Чтобы сделать радиопередатчик, я мог бы использовать таймер 555, работающий на частоте, например, 850 кГц (850 000 периодов в секунду), и пропустить этот поток импульсов через усилитель на передающую башню. Если у вас был бы какой-либо способ блокировать всю другую электромагнитную активность в эфире, то вы могли бы выделить мой сигнал и усилить его.
Это что-то вроде того, что делал Маркони (Marconi) (рис. 5.68) в уже далеком 1901 году после того, как он у Эдисона (Edison) приобрел права на патент беспроволочного телеграфа, хотя он для создания колебаний должен был использовать примитивный искровой разрядник, а не таймер 555. Его возможности для передачи сигналов были очень ограничены, поскольку он мог передавать только два состояния — «включено» или «выключено». Таким образом, вы могли бы послать сообщения, но только с помощью азбуки Морзе, и более ничего.

Рис. 5.68. Маркони (Marconi), выдающийся первооткрыватель радио (фотография взята из хранилища мультимедийных файлов Wikimedia Commons, т. е. с сайта http://commons.wikimedia.org/wiki)
Пятью годами позднее первый настоящий аудиосигнал был передан путем смешивания низких звуковых частот с высокочастотной несущей. Другими словами, аудиосигнал был «добавлен» к несущей частоте, так что мощность несущей частоты менялась в соответствии с максимумами и минимумами аудиосигнала.
На принимающей стороне использовалось очень простое соединение конденсатора и катушки — колебательный контур, который позволял выделять несущую частоту из всех других частот электромагнитного спектра. Значения конденсатора и катушки выбирались таким образом, чтобы в схеме они могли бы «резонировать» на той же самой частоте, что и частота несущей. Этот принцип показан на рис. 5.69–5.70.
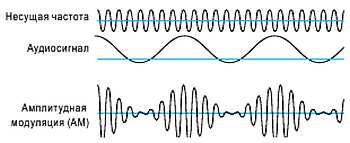
Рис. 5.69. Когда аудиосигнал (в середине) электронным образом смешивается с высокочастотной несущей (вверху), результат будет в виде некоторого комбинированного сигнала, который показан внизу. На практике реальная частота несущей должна быть намного больше по сравнению со звуковой частотой в соотношении примерно 1000:1
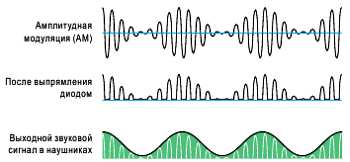
Рис. 5.70. Когда этот комбинированный сигнал проходит через диод, то после него остается только положительная половина сигнала. Наушник не может быстро реагировать, чтобы воспроизводить высокочастотную несущую частоту, поэтому он как бы «скользит» по высокочастотным пикам сигнала и таким образом воспроизводит звуковую частоту
На рис. 5.71 показана схема простейшего радиоприемника, который вы немногим ранее собирали, намотав катушку вокруг пустой бутылки из-под витаминов. Определенные высокочастотные импульсы, принятые антенной, вступают в резонанс с антенной и катушкой, при условии, что антенна имеет достаточную длину, и подключение к катушке выполнено к соответствующему отводу с необходимым числом витков.
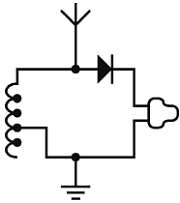
Рис. 5.71. Антенна вверху схемы от удаленного передатчика принимает слабое электромагнитное излучение. Катушка с левой стороны разделена на отдельные участки таким образом, чтобы можно было легче войти в резонанс с соответствующей несущей частотой радиосигнала. Другие частоты заземляются (в нижней части схемы). Диод пропускает «верхнюю половину сигнала» на наушник, показанный справа. Наушник не может реагировать на высокочастотную несущую, которая таким образом отфильтровывается, а воспроизводит только сигналы звуковой частоты, которые наложены на несущую
Добавив конденсатор с переменной емкостью, вы получаете возможность настраивать схему. Теперь поступающий от передатчика исходный высокочастотный импульс во время зарядки конденсатора преграждается индуктивностью катушки. Чуть позже при верно настроенных значениях емкости конденсатора и индуктивности катушки через катушку выполняется разряд конденсатора. Таким образом, частота несущей заставляет схему колебаться в резонанс с ней. Одновременно с этим изменения мощности сигнала на звуковой частоте в схеме превращаются в колебания напряжения.
Что случается с другими частотами, которые воспринимаются антенной? Низкие частоты проходят через катушку на землю; высокие проходят на землю через конденсатор. Таким образом они попросту «отбрасываются».
Правая половина схемы получает сигнал, пропуская его через германиевый диод и подавая затем на наушник. Мощности от передатчика будет вполне достаточно для того, чтобы заставить вибрировать мембрану наушника, после того как диод удалит отрицательную половину АМ-сигнала.
Посмотрите на график амплитудно-модулированного сигнала. Вы видите, что сигнал так быстро колеблется вверх и вниз, что наушник просто не может отреагировать на эти изменения — отсюда возникает необходимость добавления диода. Мембрана динамика будет оставаться без колебаний при изменении модулированного сигнала между высокими и низкими значениями, вообще не производя никакого звука. Эту проблему может решить диод, отсекая нижнюю половину АМ-сигнала, оставляя только положительные импульсы напряжения. Хотя эти изменения очень малы и кратковременны, они все же будут воздействовать на мембрану наушника в том же самом направлении; таким образом, колебания будут усредняться, приблизительно восстанавливая исходную звуковую волну.
На рис. 5.72 показано, как можно улучшить схему радиоприемника за счет добавления переменного конденсатора, поскольку при настройке контура уже не нужно будет подключаться к различным отводам катушки.
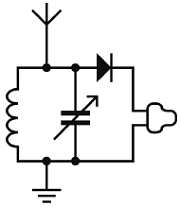
Рис. 5.72. За счет добавления в схему конденсатора резонанс контура может быть настроен более точно. Стрелка в обозначении конденсатора, проведенная по диагонали, показывает, что используется именно переменный конденсатор
Радиоприемник может настраиваться на наиболее мощные в вашей местности станции, вещающие в АМ-диапазоне (передача сигнала с амплитудной модуляцией). Диапазон принимаемых радиоволн простирается от 300 кГц до 3 МГц. Если вы заинтересовались радио, то следующим шагом могло бы быть монтирование радиоприемника с использованием нескольких транзисторов. В качестве альтернативы можно изготовить ваш собственный (легальный) маломощный передатчик, работающий в АМ-диапазоне. Здесь приведен очень простой набор компонентов, который можно приобрести на сайте http://www.scitoys.com. Набор состоит всего лишь из двух основных компонентов: кварцевого генератора и трансформатора, которые показаны на рис. 5.73. И это все, что в нем есть.
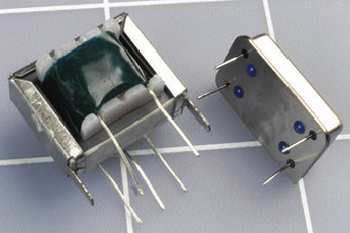
Рис. 5.73. Радиопередатчик АМ-диапазона может быть изготовлен всего лишь из двух компонентов: трансформатора (слева) и кварцевого генератора (справа), которые можно приобрести на веб-сайте http://www.scitoys.com.
Эксперимент 32. МАЛЕНЬКАЯ РОБОТОТИЗИРОВАННАЯ ТЕЛЕЖКА
Робототехника это другая область применения электроники, которая заслуживает сама по себе отдельной книги, или даже нескольких книг. В данном случае хочу повторить еще раз, что я намерен предоставить вам всего лишь только некоторое введение в эту область с указанием нескольких моментов, которым вы должны следовать, если хотите продвинуться дальше. Как всегда я начну с самого простого устройства, которым в области робототехники является простейшая тележка, осуществляющая поиск пути в пределах вашей жилой комнаты.
Вам понадобятся:
1. Однополюсные однопозиционные или однополюсные двухпозиционные микропереключатели с минимальным давлением, которое требуется для их переключения (рис. 5.74). Усилие в пределах от 0,02 до 0,1 Н (ньютона) будет идеальным. Количество — 2 шт.

Рис. 5.74. Микропереключатель имеет маленькую кнопку (показана на переднем плане, справа), которая очень часто приводится в действие закрепленным металлическим рычажком. Микропереключатель может срабатывать под воздействием очень небольшого усилия, но в состоянии переключать относительно большой ток
2. Редукторный двигатель постоянного тока с номинальным напряжением от 5 до 12 В, потребляющий максимальный ток до 100 мА при работе без нагрузки, достигает частоты оборотов от 30 до 60 об./мин. Количество — 1 шт. Двигатель приведен на рис. 5.75.

Рис. 5.75. Для этой маленькой роботизированной тележки я нашел двигатель на 5 В, который поставляется с диском, установленным на валу. Этот набор стоит менее $10
3. Диск или рычаг, который должен быть прочно установлен на вал вашего двигателя. Количество — 1 шт.
4. Таймер 555. Количество — 1 шт.
5. Двухполюсное двухпозиционное реле без фиксации, которое имеет то же самое номинальное напряжение, что и ваш двигатель. Количество — 1 шт.
6. Фанера или пластик толщиной 1/4'' (6 мм), один кусок площадью приблизительно 2 кв. фута (1858 см2).
7. Саморез #4 для скрепления тонколистового металла длиной 5/8'' (16 мм) или 3/4'' (19 мм). Количество — 24 шт.
8. Винты М6 длиной 3/4'' (19 мм), с гайками с нейлоновыми вставками для фиксации. Количество — 24 шт.
9. Винты диаметром 1/4'' (6 мм), длиной 1'' (25,4 мм), с гайками для крепления колес. Количество — 4 шт.
Я не рекомендую какую-либо конкретную модель двигателя, поскольку, если это сделаю, то может оказаться, что к тому времени, когда вы будете читать эту книгу, его невозможно будет купить. Ситуация с двигателями совсем не такая, как с логическими микросхемами, которые остаются неизменными со своими основными функциями, проходя через различные улучшения в течение нескольких десятков лет. Двигатели приходят и уходят, и многие из тех, которые вы использовали, окажутся деталями, которые вы больше никогда не увидите снова. Поищите в Интернете по запросу «редукторный двигатель» (англ. gear-motor) или «двигатель с зубчатым редуктором» (англ. gearhead motor) и сможете найти какой-либо двигатель с техническими характеристиками, приблизительно соответствующими указанным мною. Выходная механическая мощность двигателя не имеет большого значения, потому что мы не собираемся требовать от него работы в течение длительного периода времени.
Важным обстоятельством при покупке двигателя является то, что вы должны также приобрести что-то, что можно установить на свой выходной вал. Обычно это будет диск или рычаг, которые могут быть закреплены на месте с помощью винта. К этому вы можете затем добавить колесо собственного изготовления и большего размера, вырезанное из завинчивающейся крышки от банки или из какого-нибудь другого круглого предмета, который вы можете найти в доме.
Колесо большего размера сделает вашу тележку более быстрой, чем с колесами меньшего диаметра, но это будет уменьшать и момент сил, что ограничит возможности тележки при преодолении препятствий.
Все это заставляет меня перейти к следующей теме — изготовлению. Хотя эта книга по электронике, двигатели относятся к электромеханическим устройствам, и вы должны быть в состоянии установить их на некоторую машину, чтобы получить интересные результаты.
Вы можете использовать фанеру для завершения двух небольших роботизированных проектов (в идеале должна подойти тонкая высококачественная фанера, которая продается в магазинах для любителей мастерить), но я рекомендую кое-что, что выглядит лучше и легче обрабатывается: АБС-пластик (ABS plastic). Перед началом изготовления роботизированной тележки вам может показаться интересным прочтение разд. «Фундаментальные сведения — Все о АБС-пластике».
Все о АБС пластике
Вы, наверное, не захотите изготавливать свою роботизированную тележку, похожую на реликвию, созданную до 1800 г. Поэтому дерево может оказаться не самым лучшим конструктивным материалом. Металл дает возможность получить привлекательный внешний вид, но он не так легко поддается обработке. Для получения быстрых результатов, которые выглядят убедительно с точки зрения XХ века (а может быть даже и с точки зрения XXI века), пластик очевидно является достойным выбором, и я чувствую, что АБС-пластик (ABS plastic) относится к наилучшему типу, пригодному для этой цели. Он дает возможность получить отличные результаты легко и быстро. Сокращение АБС (ABS) означает «акрилонитрил-бутадиен-стирол».
Блоки конструктора Лего (Lego®) изготавливаются именно из ABS-пластика. Данный материал применяют установщики автомобильных стереосистем и фанаты железнодорожных моделей. Вы тоже можете его использовать. Вы можете его пилить, сверлить, обрабатывать наждачной бумагой, строгать, а также завинчивать в него саморезы и при этом он не будет коробиться, расслаиваться, от него не будут отлетать щепки. Его можно мыть, он не требует окраски и может служить почти бесконечно долго. Другим типом пластика, пригодного для этой цели, является дельрин (англ. delrin), но он стоит дороже и его несколько труднее сверлить или разрезать.
Однако все это лежит в области персональных предпочтений. АБС-пластик обрабатывается достаточно хорошо, но когда его приходится сверлить, например, он может «захватывать» сверло, и просверливаемый предмет начнет вращаться вместе со сверлом и одновременно пластик будет разбиваться сверлом. Дельрин — это пластик, который обладает самосмазывающими свойствами и в меньшей степени расплавляется под действием приложенного источника тепла, поэтому при его сверлении и разрезании качество обработанной поверхности выше и этого качества добиться легче, чем при использовании АБС-пластика.
Где можно приобрести АБС-пластик
Куски АБС-пластика размером порядка двух квадратных футов (1858 см2) можно приобрести в Интернете, например, на сайте http://hobbylinc.com или на интернет-аукционе eBay, но вы сможете сэкономить, если посетите ближайший магазин по продаже пластиков и приобретете листы размером 4х8 футов (122х244 см). Чтобы найти, где находится ближайший магазин по продаже пластиков, поищите в разделе «продажа пластиков» в вашем справочнике «Желтые страницы» или на интернет-ресурсе Google Local. Компания Piedmont Regal Plastics имеет много центров продажи в стране, но вам нужно все определенного размера, а они могут не захотеть заниматься разрезанием на маленькие куски.
Вы также можете посмотреть по интернет-адресу http://www.piedmontplastics.com, где находятся магазины этой компании.
АБС-пластик может быть черного, белого или «натурального» бежевого цвета. С одной стороны листы обычно имеют текстуру. Предполагается, что эта сторона будет наружной, поскольку она более устойчива к царапинам, чем гладкая.
Поскольку вам не надо будет выполнять окрашивание или применять какую-нибудь другую обработку, вы должны быть очень аккуратными, чтобы не допустить возникновения царапин при обработке материала. Перед началом работы тщательно очистите поверхность вашего стола, уделив особое внимание удалению любых металлических деталей, которые имеют тенденцию проникновения в пластик. Используя тиски, применяйте деревянные подкладки и не оставляйте на пластике любые острые предметы или саморезы. Работа с АБС-пластиком требует чистой среды и аккуратного обращения.
Осторожность при разрезании пластика
Вы можете сами распилить АБС-пластик, но если вы используете настольную пилу (станок), то пластик может начать расплавляться и прилипать к диску. Эти размякшие места будут разогреваться и прилипать к диску, и когда вы начнете распиливать следующий кусок пластика, результат может оказаться крайне неприятным. Неровности на диске могут захватить пластик и выбросить его в вашу сторону с такой силой, что ее будет вполне достаточно, чтобы нанести вам очень серьезное увечье. Эта ситуация известна, как «вылет распиливаемого материала», нужно опасаться такого развития событий при распиливании пластика (рис. 5.76).

Рис. 5.76. Опасность вылета распиливаемого материала. Пластик легко прилипает к диску настольной пилы, что приводит к неожиданному его вылету в вашу сторону. Для разрезания пластика все же лучше воспользоваться другим инструментом
Если у вас есть опыт эксплуатации настольной пилы, все равно вам надо быть более внимательным, поскольку рефлексы и предупредительные действия, которые вырабатываются при работе с деревом, не всегда пригодны при обработке пластика. Пожалуйста, отнеситесь к этому предупреждению крайне серьезно!
Самой первой и наболеет очевидной предосторожностью должно быть применение диска, который специально предусмотрен для распиливания пластика. У него большее количество толстых зубцов, предназначенных для отвода тепла. Диск, который использую я, называется Freud 80T, но есть и другие не менее подходящие. Если вы применяете диск, который не пригоден для этого, то вы заметите, как на нем начнут накапливаться размякшие частицы пластика. Это единственное предупреждение, которое вы можете получить. Заметив такое, нужно очистить диск каким-либо растворителем, например, ацетоном, и никогда не использовать его повторно для распиливания АБС-пластика.
Когда вы собираетесь работать с настольной пилой, вне зависимости от других принятых мер предосторожности, всегда надевайте перчатки и защитные очки, и становитесь с одной стороны от подаваемого в станок материала. Что касается лично меня, то после одного такого вылета распиливаемого материала я сломал себе руку и теперь предпочитаю не пользоваться настольной пилой для распиливания пластика вообще.
Для выполнения длинных прямых разрезов в качестве альтернативы можно использовать:
• форматно-раскроечный станок (большое и дорогое, но безопасное и точное оборудование);
• миниатюрную ручную циркулярную пилу с диском диаметром порядка 4'' (102 мм) с направляющей, в качестве которой используется стальная линейка, закрепленная на листе;
• ручной пилой. Это моя старая школьная любовь. Мой любимый инструмент японская ножовка, которая делает очень чистые разрезы: можно использовать ножовку Vaughan Extra-Fine Cross-Cut Bear Saw, длиной 9,5'' (24 см), 17 tpi (зубцов на дюйм). Если вы используете один из этих инструментов, то держите вашу свободную руку наготове, поскольку пила может легко «выпрыгнуть» из разреза.
Поскольку такая ножовка спроектирована для распиливания твердых материалов, таких как дерево, то разрезать человеческую плоть для нее не представляет никаких проблем. Настоятельно рекомендуется при работе надевать перчатки.
Закругление разрезанных кусков
Закругление разрезанных кусков представляет собой значительно меньшую опасность, хотя защиту для глаз и перчатки разумно применять и в этом случае. Предпочитаемые мною инструменты.
• Ленточная пила с лентой 3/8" (9,5 мм) или 1/4'' (6,4 мм), предназначенная для разрезания тонкого дерева или фанеры.
• Лобзик. У меня есть лобзик специальной модели DeWalt XRP, в котором используются пилки компании Bosch, предназначенные для пиления твердых пород дерева или пластика. С его помощью можно распиливать листы АБС-пластика по любому сложному контуру с такой же легкостью, с какой ножницы разрезают бумагу.
В принципе не имеет значения, какую пилу вы используете, задача состоит в том, чтобы получить чистые ровные пластины пластика. Также абсолютно необходимо для этой цели использовать инструменты для удаления заусениц, которые можно найти на сайте http://www.mcmaster.com и на других ресурсах в Интернете, посвященных инструментам. Ленточно-шлифовальный станок или дисковый шлифовальный станок идеальное оборудование для скругления углов, а металлический напильник может быть использован для удаления неровностей на краях, от которых требуется, чтобы они были ровными.
На рис. 5.77–5.80 показано различное режущее оборудование. На рис. 5.81 приведены инструменты для удаления заусениц, а на рис. 5.82 показан дисковый шлифовальный станок.

Рис. 5.77. Ленточная пила это идеальный инструмент для разрезания АБС-пластика по сложному контуру. Их часто можно найти среди б/у оборудования по цене менее $200

Рис. 5.78. Ручная циркулярная пила, которая распиливает вдоль закрепленной направляющей линейки, намного безопаснее настольной пилы при разрезании пластика, но при этом дает возможность добиться сравнимого с ней по качеству результата

Рис. 5.79. Это так называемая японская ножовка, которая в основном пилит, когда вы тянете на себя, а не толкаете от себя. После некоторой практики вы сможете использовать ее для выполнения очень аккуратных разрезов. Поскольку АБС-пластик достаточно мягкий материал, затраты при его распиливании очень невелики

Рис. 5.80. Этот лобзик DeWalt может двигаться с очень медленной скоростью, что дает возможность выполнить необходимую работу с пластиком точно и аккуратно

Рис. 5.81. Инструмент для удаления заусениц будет очищать и закруглять отрезанный край куска пластика всего лишь за несколько быстрых проходов

Рис. 5.82. Ленточная пила или дисковый шлифовальный станок идеальные средства для закругления краев при обработке АБС-пластика
Подготовка чертежей
Мне нравится использовать графическое программное обеспечение для подготовки чертежей, и я стараюсь распечатывать их в натуральную величину. Затем я приклеиваю их к гладкой стороне белого или натурального цвета АБС-пластика, а после с помощью шила делаю проколы через бумагу, чтобы сделать отметки на мягкой поверхности пластика. Далее я удаляю бумагу и соединяю эти отметки, используя карандаш или остроконечную ручку с водорастворимыми чернилами. Ими я наношу линии, которые потом можно будет смыть влажной тряпкой. Для этого не следует использовать несмываемый маркер, поскольку растворитель, который в этом случае понадобится, может растворить и пластик.
Поскольку АБС-пластик может треснуть при изгибе, поэтому на внутренних углах, где нет плавного радиуса, вам в этих местах придется просверлить отверстия, как это показано на чертеже отдельных деталей тележки на рис. 5.92.
Обычное сверло для дрели диаметром 1/2'' (12 мм) использовать слишком опасно; оно склонно заедать внутри пластика уже после одного оборота дрели. В данном случае, чтобы сделать аккуратные круглые отверстия, лучше использовать специальные сверла Форстнера (Forstner), которые показаны на рис. 5.83 и 5.84.

Рис. 5.83. С помощью специального сверла Форстнера (Forstner) можно выполнять чистые и аккуратные отверстия; обычное сверло большого диаметра будет «зажевывать» АБС-пластик, что безусловно будет приводить к браку

Рис. 5.84. Высверливание отверстий в любом месте, где есть пересечение двух изгибов, уменьшает риск растрескивания пластика
Следует помнить, что тепло выделяемое при гибке пластика может сделать на нем какие-нибудь постоянные отметины.
Гибка пластика
Большим преимуществом пластика по сравнению с деревом является именно то, что вы, используя пластик, можете получить конструкцию более сложной формы, изгибая пластик, вместо того, чтобы разрезать его на куски, а потом соединять гвоздями, саморезами или клеем. К сожалению, выполнение изгиба требует использования соответствующего оборудования: оно представляет собой разогревающийся электроэлемент в длинном и тонком металлическом корпусе, который можно установить на рабочий стол. Гибочное устройство, которое использую я, изготовлено компанией FTM, предлагающей все необходимые устройства для работы с пластиком. Их самое дешевое устройство показано на рис. 5.85, оно стоит немногим более $200 и имеет рабочий элемент длиной около двух футов (около 60 см). Вы можете приобрести модель с гибочным элементом длиной 4 фута (примерно 120 см), доплатив еще $50. Посмотрите все предложения компании на сайте http://thefabricatorssource.com.

Рис. 5.85. Выполнение чистых точных изгибов АБС-пластика это просто небольшое по времени пребывание пластика на гибочном устройстве, которое состоит практически из одного электрического нагревательного элемента
При выполнении гибки следует опасаться ожогов
Гибочное устройство для пластика может стать причиной получения серьезных ожогов, если вы случайно коснетесь его рукой, а поскольку на нем нет предупреждающей индикации, то вы можете легко забыть о том, что оно включено. Не забудьте использовать перчатки!
Чтобы согнуть пластик, нужно положить его на нагревательный элемент гибочного устройства на короткое время — от 25 до 30 сек для АБС-пластика толщиной 1/8'' (3,2 мм), от 40 до 45 сек для пластика толщиной 3/16'' (4,8 мм) и почти минуту для 1/4'' (6,4 мм). Если вы перегреете пластик, то почувствуете соответствующий запах, а когда его перевернете, то увидите, что поверхность стала похожа на коричневый плавленый сыр. Естественно, что вы должны научиться выполнять работу до того, как пластик разогреется до этой точки.
Когда АБС-пластик будет поддаваться легкому надавливанию, тогда он готов к изгибу. Возьмите его с гибочного устройства и согните в сторону, которая противоположна нагретой стороне.
Если вы будете его гнуть по направлению к горячей стороне, то размякший пластик будет создавать вздутия внутри изгиба, которые выглядят не очень-то здорово.
Вы можете работать с нагретым пластиком в течение полминуты, а затем, если получите то, что нужно, опрыскайте его водой или протрите влажной губкой, чтобы он быстро остыл и затвердел. В противном случае, если вам потребуется больше времени, то вам нужно выполнить повторный нагрев. Усилие, которое необходимо приложить, чтобы согнуть лист, возрастает прямо пропорционально его длине, поэтому выполнить изгиб большой длины может оказаться затруднительным, из-за чего я обычно вставляю пластик в раскрытые тиски и надавливаю на него, затем перемещаю лист вдоль предполагаемого изгиба на новое место и надавливаю снова.
Поскольку гибка пластика очень похожа на изготовление фигурок оригами, то перед тем как работать с пластиком рекомендуется выполнить ваш проект из бумаги.
Если вы решите, что вам не следует тратить деньги на гибочное устройство, не отказывайтесь от пластика совсем — для сборки отдельных пластиковых деталей тележки вы можете использовать саморезы, что гораздо проще и удобнее, чем при работе с деревом.
Выполнение соединений под углом 90 градусов
Завинчивание саморезов в край листа фанеры почти всегда приводит к ее расслоению, но АБС-пластик не имеет слоев (зерен или чего-нибудь еще в этом роде), поэтому он никогда не разделяется на слои и не раскалывается. Это означает, что вы можете легко соединять две детали под углом 90°, используя небольшие саморезы #4, и длиной 5/8'' (16 мм).
На рис. 5.86–5.90 показан порядок соединения одной детали из АБС-пластика толщиной 1/8'' (3,2 мм) или толще к другой детали толщиной 1/4'' (6,4 мм), которую я считаю минимальной для крепления саморезами в торец.
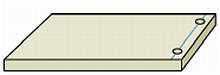
Рис. 5.86. Первая деталь из пластика толщиной 3,2 мм или более с двумя выполненными отверстиями
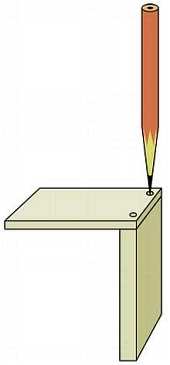
Рис. 5.87. Разметка отверстий во второй более толстой детали из пластика толщиной 6,4 мм

Рис. 5.88. Отверстия во второй детали

Рис. 5.89. Три самореза #4 завинчены в край АБС-пластика с использованием предварительно выполненных отверстий диаметром 1/16'' (1,6 мм), 5/64'' (2 мм) и 3/32'' (2,4 мм) соответственно. Поскольку два первых отверстия (слева) имели слишком маленький диаметр по сравнению с диаметром самореза, то это привело к вздутию пластика (вокруг самореза, но при этом он все же не сломался)
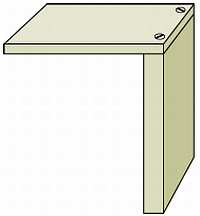
Рис. 5.90. На рис. 5.86–5.90 показаны все 4 этапа соединения деталей из АБС-пластика с использованием саморезов #4, предназначенных для скрепления тонколистового металла. В детали из тонкого пластика сделайте отверстия диаметром 7/64'' (2,78 мм) ровно по линии на расстоянии 1/8'' (3,2 мм) от края, затем сделайте разметку отверстий на торце другой детали. Просверлите отверстия диаметром 3/32'' (2,4 мм), которые должны располагаться точно по центру толщины второй детали, затем, как показано на этом рисунке, выполните соединение деталей с помощью саморезов
1. Нанесите линию разметки на краю более тонкого пластика на расстоянии 1/8'' (3,2 мм) от края (рис. 5.86). Для саморезов #4 нужно просверлить отверстия сверлом диаметром 7/64'' (2,78 мм). Если вы используете саморезы с плоской головкой, то зенковать отверстия под них нужно очень осторожно.
2. Зафиксируйте или сожмите детали между собой в нужном положении и, вставив ручку или карандаш через отверстия более тонкого пластика, выполните разметку на торце детали из пластика толщиной 1/4'' (6,4 мм) (рис. 5.87).
3. Снимите тонкий пластик и зажмите деталь толщиной 1/4'' (6,4 мм) в тисках, а затем просверлите отверстия под саморезы в каждой намеченной точке, строго по центру толщины пластика (рис. 5.88). Поскольку АБС-пластик не сжимается, как дерево, отверстия будут больше, чем вы можете ожидать; в противном случае пластик будет раздуваться вокруг самореза (рис. 5.89). Для самореза #4 подойдет сверло диаметром 3/32'' (2,4 мм).
4. Соберите детали (рис. 5.89). При вкручивании саморезов будьте осторожны, чтобы не ввинтить их слишком сильно; поскольку очень легко сорвать резьбу, которую они нарезали внутри мягкого пластика.
Изготовление рамы вашей тележки
По причинам, которые вскоре станут понятными, я выбрал необычную ромбовидную конфигурацию расстановки колес. На изображении, которое приведено на рис. 5.91, переднее колесо (показано на дальнем конце тележки) является ведущим, а заднее колесо (на ближнем краю тележки) управляет тележкой, при этом боковые колеса не дают ей перевернуться.
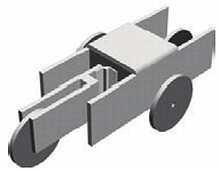
Рис. 5.91. Если у вас на компьютере имеется программное обеспечения для выполнения изображений в формате 3D, то это может оказаться отличным способом проверить применимость конструкции проекта перед тем, как разрезать материалы и пытаться соединить их вместе. Это представленное крупным планом изображение — выбранная идея конструкции небольшой роботизированной тележки
В зависимости от типа приобретенного вами двигателя, вы должны будете импровизировать, придумывая способ его монтажа в передней части тележки. Не следует опасаться использования необычных подручных материалов, например, кабельных стяжек, лент для герметизации трубопроводов или даже резиновых лент, чтобы присоединить двигатель к раме. В данном случае мы собираемся сделать очень приблизительный опытный образец, а не предел красоты (хотя, если вам понравится конструировать, то позже сможете изготовить более качественную тележку).
Чертеж на рис. 5.92 показывает те детали, которые вам потребуются.
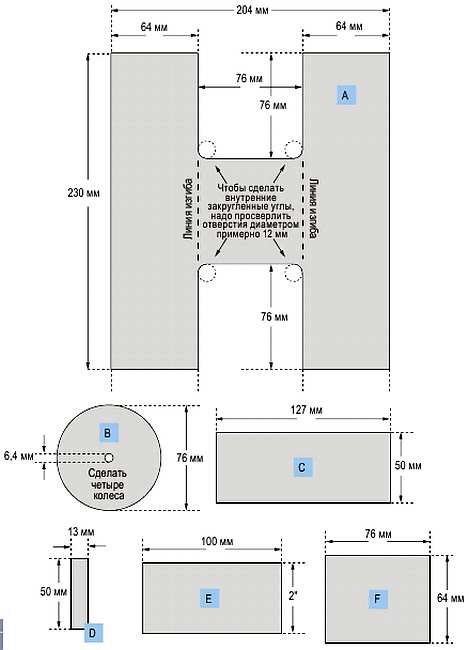
Рис. 5.92. Для создания простой тележки, которая описана в эксперименте 31, эти детали из пластика толщиной 1/4'' (6,4 мм) могут быть собраны в единое целое
Деталь «А» представляет собой корпус тележки. Если вы собираетесь выполнить корпус с помощью гибки АБС-пластика, то в четырех внутренних углах детали специальным сверлом Форстнера (Forstner) должны просверлить отверстия диаметром примерно 1/2'' (12 мм), поскольку эти углы имеют закругления.
Если же вы просто разрежете пластик, выполнив внутренний вырез под углом 90°, то когда вы будете гнуть пластик, по углам могут образовываться трещины. Если же у вас нет гибочного устройства для пластика и нет желания ее приобретать, то вы можете сделать деталь «А» из трех отдельных прямоугольных деталей, а затем соединить их винтами вместе.
Деталь «B» является колесом, причем в данном проекте необходимо сделать 4 таких колеса. Я вырезал их кольцевой пилой (специальной сверлильной коронкой) диаметром 3'' (76 мм).
Чтобы осуществить привод от вала вашего двигателя, переднее ведущее колесо привинчивается к любому диску (рис. 5.93).

Рис. 5.93. Колесо диаметром 3'' (76 мм) привинчивается к диску, который соответствует диаметру приводного вала вашего двигателя
Детали «C», «D» и «E» собираются для изготовления вилки, в которую будет устанавливаться заднее колесо. Я применил петлю длинной 2'' (50 мм), которая используется для поворота вилки колеса. Петля крепится к детали «F», которая крепится посередине рамы тележки.
О чем идет речь вам помогут представить фотографии на рис. 5.94 и 5.95.
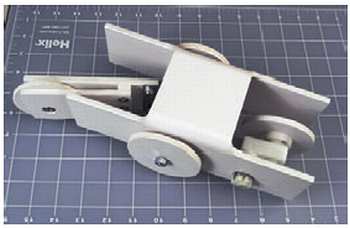
Рис. 5.94. Собранная тележка перед добавлением электронных элементов управления. Колесо с правой стороны будет тащить тележку слева направо. Рулевое колесо, подвешенное на петле, даст возможность тележке перемещаться по относительно прямой линии, когда она будет перемещаться вперед, но будет заставлять поворачивать, когда она поедет в обратную сторону

Рис. 5.95. Крупный план рулевого колеса, которое свободно поворачивается на петле и может перемещаться из стороны в сторону с минимальным трением
Изначально, когда я устанавливал деталь «F», я использовал только два самореза с каждой стороны таким образом, чтобы можно было немного регулировать ее угол наклона. Это может быть необходимо для оптимизации контакта колес с полом.
Заднее и боковые колеса должны вращаться свободно, но, с другой стороны, не должны болтаться. Я просто затягивал гайки винтов, которые служат осями колес, до тех пор, пока зазор не становился равным примерно 0,5 мм. Кроме того, для фиксации гаек я добавил каплю герметика Loctite.
Эскиз точно не указывает место, где надо просверлить отверстия для осевых винтов, потому что их расположение будет зависеть от размера ваших колес. Вы можете рассчитать это положение, если учтете следующее. Нужно просто быть уверенным, что боковые колеса не будут установлены слишком низко. Мы не хотим, чтобы они поднимали переднее или заднее колеса над полом. Если же боковые колеса будут немного выше над землей, чем переднее и заднее колеса, то это будет хорошо.
Если у вас пол покрыт плиткой или имеется деревянное покрытие, то ваша тележка будет иметь лучшее сцепление с ним, если вы обмотаете толстой резиновой полоской каждый диск колеса, которые вы будет использовать в качестве управляющего и передвигающего тележку.
Самым важным в конструкции является расположение микропереключателей в тех местах, в которых они должны сработать, если тележка коснется какого-либо предмета. Я расположил все микропереключатели на передних углах корпуса так, как это показано на рис. 5.96 и 5.97, и только после этого обратился к электронной части.

Рис. 5.96. Крепление одного микропереключателя на левом переднем углу тележки
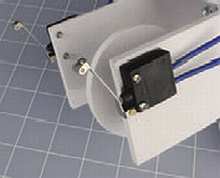
Рис. 5.97. Два микропереключателя с металлическими рычажками расположены с каждой стороны тележки, где они будут хорошо «чувствовать» каждое встречающееся препятствие
Схема
Схема данного проекта чрезвычайно проста — в ней всего лишь четыре принципиальных компонента: два микропереключателя, которые чувствуют препятствия впереди тележки, одно реле и один таймер 555 (рис. 5.98). Вам еще потребуется небольшой выключатель напряжения питания, батарейка или блок батареек, а также резистор и конденсаторы, которые должны быть подсоединены к таймеру. Подстроечный потенциометр даст вам возможность отрегулировать время включенного состояния таймера 555, которое будет определять, как долго тележка будет отъезжать назад от препятствия.
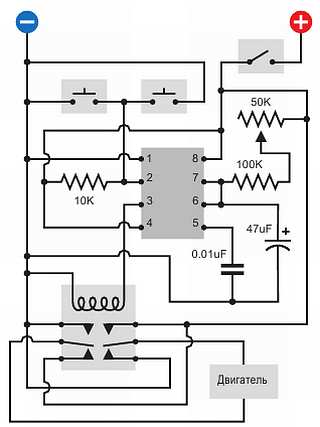
Рис. 5.98. Это очень простая электрическая схема, которая требуется тележке для того, чтобы отъезжать назад, когда она сталкивается с каким-либо препятствием
Для питания двигателя, который выбрал я, требуется напряжение 5 В, поэтому мне вместе с батарейкой на 9 В пришлось дополнительно использовать соответствующий стабилизатор напряжения. Если для вашего двигателя требуется напряжение 6 В, то вы можете последовательно соединить 4 батарейки типа АА, и подключить их к нему напрямую. Если же у вас имеется двигатель на 12 В, то вы можете для его питания использовать две последовательно соединенные 9-вольтовые батарейки, которые будут подавать напряжение через стабилизатор напряжения на 12 В.
Соберите все компоненты и установите их на тележку, а затем включите ее питание. Тележка должна начать медленно двигаться вперед по более или менее прямой траектории. Если же она сразу же поедет назад, то на вашем двигателе надо поменять местами провода.
Когда тележка «врежется» в какой-нибудь предмет, один или оба микропереключателя будут подключать отрицательное напряжение к входу таймера 555. Это приведет к тому, что запустится таймер, функционирующий в моностабильном режиме и формирующий импульс длительностью порядка 5 сек. В результате этого сработает реле, которое подключено таким образом, чтобы на выводах двигателя изменять полярность напряжения питания.
В том случае, когда будет изменена полярность напряжения питания двигателя постоянного тока, он начнет вращаться в обратную сторону. Поэтому тележка поедет назад. Поскольку заднее колесо закреплено в вилке, которая может свободно вращаться вокруг оси, поэтому она будет иметь возможность перемещаться либо в одну, либо в другую сторону, заставляя тележку перемещаться по дуге при движении назад. В конце цикла таймера реле возвращается в исходное состояние, и тележка снова начинает двигаться вперед. В режиме движения вперед заднее колесо всего лишь следует за тележкой, не прилагая какого-либо управляющего усилия, поэтому тележка будет стремиться двигаться по прямой линии до тех пор, пока не упрется в другое препятствие, после чего она снова вернется назад и попытается проехать по другому пути.
Домашнее задание по данному эксперименту включает следующие пункты.
• Вы можете купить простые двигатели постоянного тока со встроенными редукторами, обеспечивающими нужное количество оборотов в минуту; маленькие двигатели для робототехнических проектов предлагают буквально сотни различных веб-сайтов.
• Когда вы поменяете полярность напряжения питания двигателя постоянного тока, он должен начать вращаться в обратную сторону.
• Вы можете подключить двухполюсное двухпозиционное реле таким образом, что когда оно будет срабатывать, то оно будет изменять полярность подключения напряжения питания на двигателе.
• Вы можете использовать два концевых выключателя и пару диодов для остановки двигателя в двух положениях. В любом положении, когда двигатель остановлен, он не потребляет ток, и нет опасности выхода его из строя.
Какие другие проекты можно представить себе при использовании этого простого технического оснащения?
Все о концевых выключателях
Самое очевидное улучшение вашей тележки — это добавление более качественного механизма рулевого управления. Вы можете использовать другой двигатель, чтобы он взял на себя эту функцию, но к нему нужно будет добавить пару концевых выключателей. Поскольку концевые выключатели относятся к основным электронным деталям, которые очень важны для эксплуатации двигателей, я остановлюсь на них более подробно.
На рис. 5.99 (ЦВ-рис. 5.99) показаны три последовательных положения двигателя с прикрепленным к нему рычагом, который может оказывать давление либо на верхнюю, либо на нижнюю кнопки. Обе кнопки являются нормально замкнутыми, но будут размыкать свои контакты, когда на них нажмет рычаг двигателя. Эти кнопки и есть концевые выключатели. Обычно для данной задачи вы можете использовать микропереключатели, примерно такие, которые я предложил для использования в качестве датчиков регистрации наличия препятствия перед тележкой.
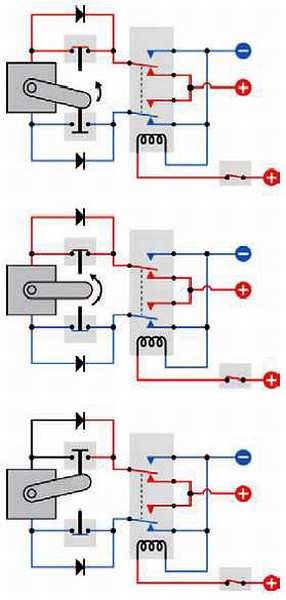
Рис. 5.99. Эти три рисунка показывают три фиксированных состояния двигателя, управляемого с помощью двухполюсного двухпозиционного реле и двух концевых выключателей. Когда выключатель типа «Вкл./Выкл.», показанный внизу справа, подает напряжение питания на обмотку реле, оно срабатывает и состояние его контактов заставляет двигатель вращаться против часовой стрелки до тех пор, пока он сам не остановится, поскольку рычаг двигателя в конце концов размыкает контакты верхнего концевого выключателя
Кроме того, в схеме должно быть установлено двухполюсное двухпозиционное реле, которое активируется простым выключателем «Вкл./Выкл.» и которое приведено на рисунке внизу справа. На тележке место переключателя «Вкл./Выкл.», подающего напряжение питания на реле, занимал таймер 555.
Предположим, что двигатель начинает работать, когда рычаг находится в нижнем положении, как это показано на верхнем рисунке на ЦВ-рис. 5.99 и двигатель подключен таким образом, что к его нижнему выводу подключен отрицательный полюс источника питания, а к верхнему выводу положительный, а двигатель вращается против часовой стрелки. Это то, что происходит, когда контакты выключателя «Вкл./Выкл.» замкнуты и напряжение питания подается на обмотку реле. Положительное напряжение с контактов реле не может проходить через верхний диод, но может проходить через верхний концевой выключатель, когда он замкнут. В это время отрицательное напряжение не может проходить через нижний концевой выключатель, потому что он разомкнут, но может поступать через нижний диод. Поэтому двигатель начинает вращаться против часовой стрелки. В среднем положении своего вращения напряжение питания на двигатель подается с помощью двух замкнутых концевых выключателей.
Наконец рычаг двигателя достигает верхнего концевого выключателя и размыкает его контакты. В это время на двигатель прекращается подача положительного напряжения и через этот верхний концевой выключатель и через верхний диод. Поэтому в это время двигатель останавливается.
Теперь предположим, что контакты выключателя «Вкл./Выкл.» будут разомкнуты, как это показано на рис. 5.100 (ЦВ-рис. 5.100).
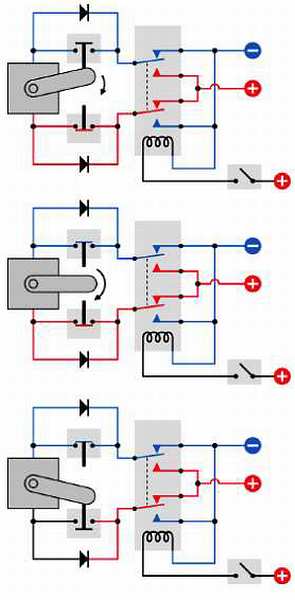
Рис. 5.100. Когда выключатель «Вкл./Выкл.», показанный внизу справа, разрывает цепь, реле возвращается в исходное состояние, замыкая верхние по схеме контакты. Это приводит к тому, что двигатель начинает вращаться по часовой стрелке до тех пор, пока его рычаг с помощью нижнего концевого выключателя не разорвет цепь питания двигателя. Концевые выключатели дают возможность предотвратить перегрев и возможное повреждение двигателя, в том случае, когда на двигатель подается напряжение питания, а он уже не может вращаться
В этом случае на обмотку реле перестает поступать напряжение питания, поэтому оно возвращается в исходное состояние и переключает контакты в верхнее по схеме положение. Теперь напряжение питания на двигатель будет подаваться в обратной полярности. Отрицательное напряжение поступит через верхний диод, в то время как положительное напряжение достигает двигателя через замкнутые контакты нижнего концевого выключателя. Двигатель в этом случае начнет вращаться по часовой стрелке до тех пор, пока рычаг не коснется нижнего концевого выключателя, размыкая его и прекращая подачу напряжения питания на двигатель.
В такой схеме концевые выключатели необходимы, поскольку если вы будете продолжать подавать напряжение питания на этот простой двигатель постоянного тока, который не будет иметь возможности вращаться, то тогда двигатель будет потреблять большой ток и разогреваться, что, в конце концов, может привести к его перегоранию.
Итак, вы легко можете понять, как система такого типа могла бы использоваться для выполнения функций рулевого управления тележки. Даже тогда, когда у двигателя всего лишь два положения, этого достаточно, чтобы заставить тележку сделать поворот, когда она возвращается назад, а затем продолжить двигаться вперед по прямой линии.
Чтобы уменьшить потребляемую мощность, обычное реле может быть заменено реле с самоудерживанием (с фиксацией состояния) и двумя обмотками. Схема при этом, разумеется, должна быть изменена таким образом, чтобы реле переходило из одного состояния в другое подачей сигнала на каждую из обмоток.
Все о двигателях
Двигатели постоянного тока с контактными щетками
Это самая старая и простейшая модель электродвигателя, которая в очень упрощенном виде приведена на рис. 5.101.
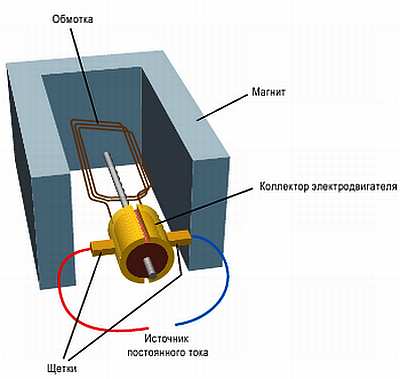
Рис. 5.101. Принцип работы простого двигателя постоянного тока. Коллектор пропускает ток через обмотку, в которой создается магнитное поле, взаимодействующее с полем постоянного магнита, расположенного в статоре (неподвижной части) двигателя. Это взаимодействие приводит к повороту якоря — внутренней подвижной части двигателя. Щетки и коллектор при вращении якоря постоянно переключают в обмотках ток. Таким образом, при подаче питания на щетки якорь двигателя будет постоянно вращаться. На практике двигатели имеют коллектор, который состоит из очень большого количества сегментов и, соответственно, большого количества обмоток. Но сам принцип работы двигателя остается таким же
Обмотки двигателя закреплены на оси двигателя внутри постоянного магнита, где они взаимодействуют с ним. Магнитное поле, действуя на обмотку, слегка поворачивает ось двигателя. В этот момент к источнику питания подключается следующая обмотка, что приводит к еще одному небольшому повороту вала, когда к источнику подключается следующая обмотка и т. д. Чтобы это было именно так, напряжение питания к обмоткам подается с помощью щеток, обычно изготавливаемых из мягкого углерода. Щетки подают напряжение на вращающиеся, разделенные на секции цилиндрические контакты, называемые коллектором, каждый контакт которого подключен к своей обмотке.
Эта элементарная конструкция обладает рядом достоинств, если мы хотим изготовить небольшое механическое устройство, например, миниатюрного робота или даже модель самолета:
• широкой доступностью;
• низкой ценой;
• простатой конструкции;
• надежностью;
• вращается в обратном направлении при изменении полярности подключения.
К тому же, электродвигатели со щетками часто продаются со встроенными понижающими редукторами. Такие двигатели известны как двигатели с зубчатыми редукторами или редукторные двигатели.
Они освобождают вас от использования редукторов собственного изготовления или ременных передач, предназначенных для получения требуемой скорости. Вам достаточно просто выбрать двигатель, который более всего соответствует вашим техническим требованиям.
Шаговые двигатели постоянного тока
Для такого двигателя требуется специальное устройство управления, которое состоит из некоторого количества электронных компонентов, указывающих двигателю каким образом вращать ось ротора небольшими дискретными шагами. К преимуществам шаговых двигателей относятся:
• точное позиционирование ротора;
• точная регулировка скорости.
Шаговые двигатели, например, являются идеальными устройствами для компьютерных принтеров, в которых бумага должна протягиваться на определенное точное расстояние, а печатающая головка также должна дискретно перемещаться в перпендикулярном направлении относительно продвижения бумаги. Кроме того, шаговые двигатели широко используются в таких устройствах, как роботы. Если двигатель имеет небольшой размер и потребляет ток менее 200 мА при напряжении питания 12 В или менее, то вы можете управлять им импульсами, генерируемыми таймером 555. Более подробно шаговые двигатели описаны далее в эксперименте 33.
Серводвигатели
Такие двигатели обычно используются вместе с программируемыми микроконтроллерами, которые посылают управляющие инструкции, позволяющие точно управлять параметрами вращения оси двигателя (например, поворотом оси двигателя в нужное положение, а затем фиксации его в этом положении). Я еще буду упоминать серводвигатели, когда перейду к рассмотрению микроконтроллеров, но подробно обсуждать их мы не будем.
Существуют и другие виды электродвигателей, включая бесщеточные двигатели постоянного тока (которые требуют использования контроллеров различного типа и применяются в компьютерных дисководах и CD-плеерах), а также двигатели переменного тока (включая синхронные двигатели, которые синхронизируют свое вращение с частотой переменного напряжения и которые широко использовались в часах до того, как часы стали цифровыми).
В данной книге я буду говорить в основном о коллекторных двигателях постоянного тока с щетками и о шаговых двигателях.
Механическая мощность
В США вращательное усилие или момент силы двигателя (крутящий момент) обычно измеряется в фунтофутах (pound-fооt) или унциях на дюйм (ounce-inch). В Европе используется метрическая система, в которой эта величина измеряется в динах.
Понять что такое фунтофут очень легко. Представьте себе рычаг с одним концом, закрепленным на оси двигателя, как это показано на рис. 5.102. Если рычаг имеет длину один фут (30,48 см) и вы подвесили на него груз весом один фунт (453,6 г), то крутящий момент будет равен одному фунтофуту.
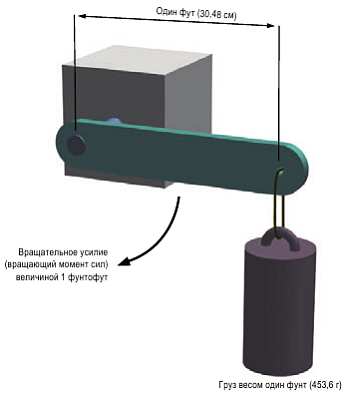
Рис. 5.102. Вращающее усилие, которое создается электродвигателем, известно как «крутящий момент», и в США оно измеряется в фунтофутах (или унциях на дюйм в случае двигателей малого размера). В метрической системе эта величина измеряется в динах. Следует иметь в виду, что момент, создаваемый двигателем, будет изменяться в зависимости от скорости, с которой двигатель вращается
Калибры проводов
Если вы собираетесь подавать напряжение питания к двигателям относительно большой мощности или на другие компоненты, которые потребляют больший ток, чем светодиоды или небольшие реле, то вам обязательно понадобится узнать больше о калибрах проводов. На практике имеется два основных вопроса — «Каково соотношение между толщиной провода и его калибром AWG (American Wire Gauge — американский калибр провода)?» и «Каким образом калибр провода должен использоваться для заданного значения тока?»
Вы можете найти бесчисленное количество диаграмм и таблиц, если поищете в Интернете, но многие из этих источников противоречат друг другу, особенно в той части, насколько большой ток безопасно пропускать через провод определенного калибра.
После выполнения нескольких сравнений (и самостоятельного тестирования ряда подобных образцов) я составил таблицу (табл. 5.1), которую я рекомендую использовать в качестве компромиссного решения. Следует учитывать следующее:
• эта таблица применима только к одножильным проводам, которые имеют сплошные медные жилы;
• для многожильных проводов, т. е. проводов из плетеных одножильных проводов или тех, в которых медь покрыта оловом (что делает их внешний вид серебряным), удельное сопротивление будет возрастать, удельная длина будет уменьшаться, а максимально допустимый ток в амперах будет уменьшаться приблизительно на 20 %.
Максимально допустимый ток это значение тока, при котором предполагается, что изолированный провод излучает такое количество тепла, которое рассеивается так же эффективно, как и у оголенного проводника. Я также полагаю, что провод может быть по меньшей мере частично закрыт внутри коробки или корпуса. При пропускании токов, которые перечислены для каждого калибра проводов, вы должны ожидать, что провод станет очень горячим, и поэтому я лично предпочитаю использовать более толстые провода, чем провода с теми максимальными значениями, которые приводятся в таблице.
В большинстве таблиц такого типа приводится только значение удельного сопротивления каждого калибра провода в омах на 1000 футов (304,8 м) длины. В таблице я указал это же значение, но добавил так же и удельную длину провода с сопротивлением, равным одному ому.
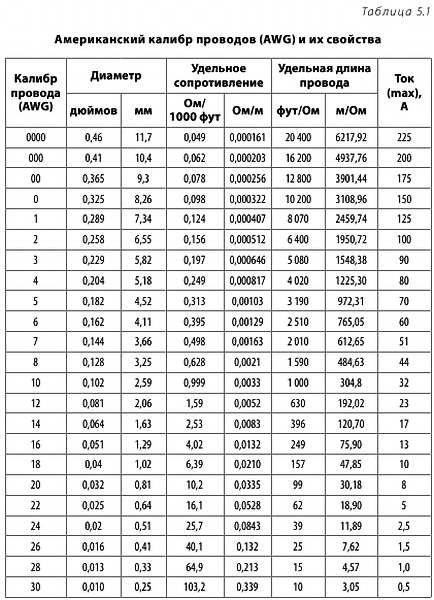
Расчетное падение напряжения
Другое, что часто требуется знать, это падение напряжения провода определенной длины, который применяется в схеме.
Если вы хотите получить максимальную мощность от вашего двигателя, то при подаче на него напряжения питания вы не должны терять слишком много напряжения на проводах, которыми подается это напряжение.
Падение напряжения довольно «хитрая вещь», поскольку оно зависит не только от провода, но также от того, насколько велика нагрузка в схеме. Предположим, что вы используете провод длиной 100 футов (30,48 м) 22 калибра (22 AWG), который имеет сопротивление около 1,5 Ом. Если вы подключили батарейку напряжением 12 В и в цепи у вас имеется светодиод и последовательно подключенный к нему резистор, то суммарное эффективное сопротивление элементов составит порядка 1200 Ом. Как видно, сопротивление провода в этом случае будет пренебрежимо мало по сравнению с сопротивлением светодиода. В соответствии с законом Ома:
I = U/R
ток в цепи составит всего лишь 10 мА.
Снова используем закон Ома:
U = I х R,
в соответствии с которым сопротивление провода, равное 1,5 Ом, создаст падение напряжения порядка 0,01 х 1,5 = 0,015 В.
Теперь предположим, что вы запускаете электродвигатель. Обмотки двигателя будут создавать полное сопротивление, гораздо большее, чем их активное сопротивление, но все же для оценки тока, который будет проходить по цепи, мы можем использовать эффективное сопротивление. Предположим, что сила тока в цепи будет равна 1 А. Для определения падения напряжения на подводящих проводах еще раз используем вторую формулу:
U = I х R.
Отсюда падение напряжения на проводах теперь будет равно 1 х 1,5 = 1,5 В!
Все это показано на рис. 5.103.
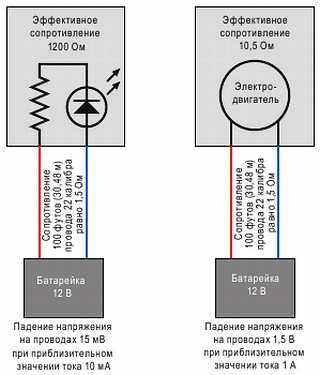
Рис. 5.103. Падение напряжения на подводящих проводах зависит от силы тока и сопротивлении питаемой цепи. Падение напряжения на проводах будет увеличиваться при уменьшении сопротивления цепи и соответственно при увеличении в ней силы тока
Учитывая эти факторы, я составил для вас табл. 5.2. Я округлил все значения до двух значащих цифр после запятой, поскольку разброс параметров используемых вами проводов делает излишним применение какой-либо более высокой точности.
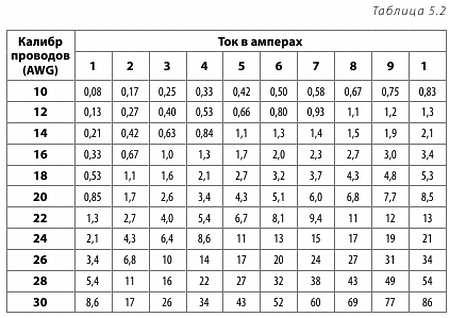
Следует заметить, что сопротивление провода будет выше, если вы используете медный многожильный провод или медный луженый провод; это соответственно будет приводить к большим потерям напряжения в процентном отношении.
Чтобы использовать эту таблицу, вам нужно знать величину тока, который проходит по цепи. Вы можете его рассчитать (деля прикладываемое к цепи напряжение на общее сопротивление в цепи) или просто измерить с помощью мультиметра. При этом надо только следить за тем, чтобы ваши единицы измерения были совместимыми (все в омах, амперах и вольтах или в миллиомах, миллиамперах и милливольтах).
В таблице я достаточно произвольно предположил, что длина подводящих проводов будет равна 10 футов (3,05 м). Естественно вы можете сделать свои допуски для действительной длины провода в вашей схеме. Чем короче провод, тем меньше будут потери напряжения. Схема, в которой длина проводов всего лишь 5 футов (1,5 м) при той же самой величине тока в амперах и питающего напряжения в процентном отношении будет создавать в два раза меньшие потери, чем те, которые указаны в таблице. Схема с проводом длиной 15 футов (4,57 м) и теми же значениями силы тока и питающего напряжения будет иметь потери в процентном отношении в полтора раза большие. Поэтому для использования табл. 5.2 надо:
1. Разделить длину вашего провода на 10, если вы измеряли длину провода в футах (или на 3,048, если измеряли в метрах).
2. Далее этот результат нужно умножить на соответствующее число из таблицы.
В таблице также достаточно произвольно предполагается, что вы используете источник питания напряжением 12 В. Теперь снова вы должны сделать некоторые преобразования, если хотите пользоваться другим напряжением питания. Поэтому для использования таблицы надо:
1. Разделить на 12 фактическое напряжение вашего источника питания.
2. Далее этот результат нужно умножить на соответствующее число из таблицы.
Я могу объединить эти два шага следующим образом:
Потери напряжения = P х (12/V) х (L/10),
где P — это число из таблицы, V — напряжение питания вашего источника питания и L — длина вашего провода.
Эта таблица показывает потери напряжения в подводящем проводе длиной 10 футов (3,05 м) в процентах при напряжении источника питания 12 В.
Эксперимент 33. ПЕРЕДВИЖЕНИЕ ШАГАМИ
Теперь пришло время изготовить нечто более сложное: тележку, которая будет ориентироваться по направлению светового луча. Я хочу рассказать, что вам потребуется, чтобы начать этот проект, но в этот раз я не собираюсь проходить весь путь до конца со всеми подробностями. Я хочу привить вам навык расчета деталей для улучшения проектов и в конечном итоге самостоятельному изобретению.
Вам понадобятся:
1. Таймеры 555. Количество — 8 шт.
2. Подстроечный потенциометр с сопротивлением 2 кОм и линейной зависимостью. Количество — 2 шт.
3. Светодиоды. Количество — 4 шт. Если вы устали подключать последовательные резисторы для защиты светодиодов в цепи 12 В, то приобретайте такие светодиоды, как Chicago Miniature 606–4302H1–12V, которые имеют свой встроенный резистор. Однако в схеме на рис. 5.107 предполагается, что вы будете использовать обычный светодиод с прямым напряжением на 2 В или 2,5 В.
4. Униполярный, четырехфазный, 12-вольтовый, типа Parallax 27964 или аналогичный ему шаговый двигатель, при условии, что максимальный потребляемый им ток будет около 100 мА. Количество — 2 шт.
5. Фоторезисторы, в идеале в диапазоне от 500 до 3000 Ом. Количество — 2 шт.
6. Микросхемы усилителей ULN2001A или ULN2003A, выполненные на транзисторной паре Дарлингтона, от компании STMicroelectronics. Количество — 2 шт.
7. КМОП-микросхема восьмеричного или десятичного счетчика. Количество — 2 шт.
8. Набор резисторов и конденсаторов.
Исследование вашего шагового двигателя
В перечне необходимых компонентов я указал униполярный, четырехфазный, 12-вольтовый шаговый двигатель, поскольку это двигатель достаточно общего типа. Типичный образец показан на рис. 5.104.

Рис. 5.104. Типичный шаговый двигатель. Ось двигателя вращается шагами, когда отрицательные импульсы последовательно подаются на четыре провода, а пятый провод является общим и подключается к положительному выводу источника питания
Если вы не сможете найти одну из тех позиций, которую я перечислил, то вы не должны переживать и напрягаться по поводу выбора других компонентов, имеющих аналогичное общее описание. «Униполярный» — означает, что вам для запуска двигателя не надо будет переключать полярность напряжения питания. «Четырехфазный» — означает, что импульсы, которые запускают двигатель, должны подаваться последовательно по четырем различным проводам. Поскольку вы будете запускать двигатель напрямую с помощью таймера 555, то чем меньше будет мощность его потребления, тем лучше.
Сначала вы можете подать напряжение на двигатель без использования каких-либо компонентов вообще. Наиболее вероятно, что он уже будет иметь пять проводов для подключения с уже зачищенными и залуженными концами, так что вы легко можете вставить их в отверстия на макетной плате, как это показано на рис. 5.105.
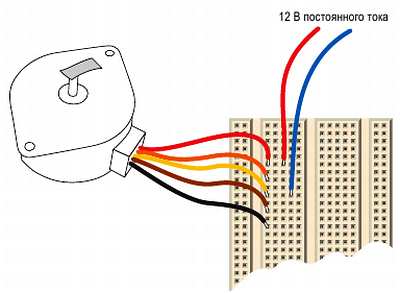
Рис. 5.105. Самый простой способ проверить шаговый двигатель — это вручную присоединить напряжение питания к каждому из четырех управляющих проводов. Кроме того, для упрощения визуального восприятия отклика двигателя на подаваемые импульсы нужно к оси шагового двигателя прикрепить кусочек липкой ленты
Проверьте справочное техническое описание на ваш двигатель; вы должны найти в нем описание четырех проводов, которые используются для подачи напряжения на двигатель для его вращения по шагам, в то время как пятый контакт должен быть общим. В большинстве случаев общий контакт должен подключаться к положительному выводу вашего источника питания, в то время как отрицательное напряжение должно последовательно подаваться на четыре других провода.
Справочный лист технических данных на двигатель подскажет вам, в какой последовательности вы должны подавать напряжение питания на провода. Необходимую последовательность вы, конечно, можете определить методом проб и ошибок.
Одну вещь вы должны иметь в виду: шаговый двигатель очень устойчивый электронный компонент. Пока вы применяете верное по величине напряжение, его сжечь нельзя. Чтобы увидеть точно, что на самом деле делает двигатель, нужно на его ось наклеить кусочек липкой ленты. Затем подать напряжение на провода по одному, подключая отрицательный контакт напряжения питания к каждому следующему контакту. В этом случае вы увидите, как ось будет поворачиваться маленькими шажками.
Внутри двигателя имеются обмотки и магниты, но их функции отличаются от тех функций, которые эти элементы обычно выполняют в двигателях постоянного тока. Вы можете начать представление конфигурации шагового двигателя с той, которая приведена на схеме на рис. 5.106. Каждый раз, когда вы будете подавать напряжение на другую обмотку, черный сектор ротора будет поворачиваться в направлении этой обмотки. На практике, конечно, двигатель будет поворачиваться на угол меньший, чем 90°, от одной катушки к следующей, но эта упрощенная модель неплохой способ для понимания в общих чертах того, что происходит. Для получения более подробной информации см. следующий разд. «Теория — Внутри шагового двигателя».
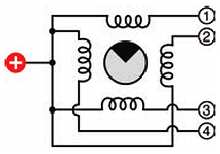
Рис. 5.106. Это сильно упрощенная схема шагового двигателя, которая помогает визуально понять его принцип работы. В действительности почти все двигатели поворачиваются на угол меньший 90° в ответ на каждый импульс, подаваемый на управляющую обмотку
Имейте в виду, что чем больше длина проводов, которыми двигатель подключается к источнику питания, тем больше получается постоянный расход мощности, даже в те моменты, когда нет никакого движения и ничего не происходит. В отличие от обычного двигателя постоянного тока, шаговый двигатель сконструирован так, чтобы большую часть времени ничего не делать.
Когда вы подключаете напряжение к его управляющим проводам, он поворачивается, делая «шаг» в это положение, и затем опять ничего не делает. Обмотка внутри двигателя удерживает ось двигателя в определенном положении, а мощность, которую двигатель при этом потребляет, рассеивается в виде тепла. Таким образом, разогрев двигателя во время эксплуатации — это вполне нормальное явление. Проблема заключается в том, что если вы используете напряжение питания от батарейки и забыли ее отключить, то батарейка очень быстро разрядится.
Быстрая демонстрация работы
Теперь вы убедились, что ваш двигатель является работоспособным, как же вы теперь можете реально запустить его?
Вам нужно посылать импульсы на каждый из четырех проводов управляющих обмоток по очереди в быстрой повторяющейся последовательности. Если вы сможете также регулировать частоту импульсов, то это будет еще лучше. Я думаю, что для быстрой и простой демонстрации работы шагового двигателя вы можете просто использовать четыре таймера 555, которые все будут работать в моностабильном режиме и которые будут последовательно запускать друг друга.
На схеме, которая приведена на рис. 5.107, показано все то, что я имел в виду. Схема выглядит несколько сложно, но это именно то, что в реальности нужно. Каждый таймер имеет одинаковый набор окружающих его компонентов, поэтому после монтажа первого модуля вам потребуется просто сделать три его копии.
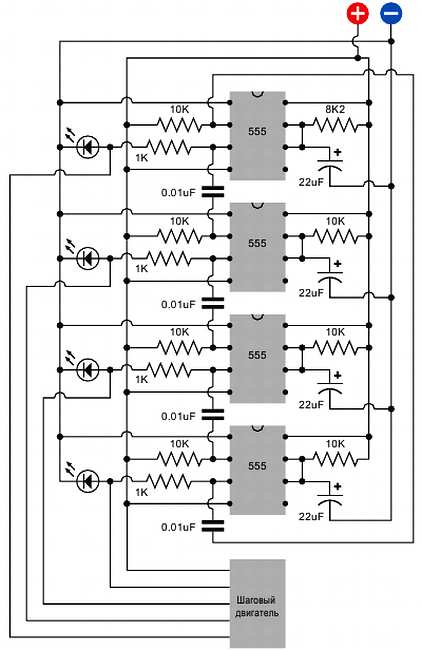
Рис. 5.107. Очень скоростная и простая схема для управления шаговым двигателем использует четыре таймера 555, каждый из которых работает в моностабильном режиме, запуская друг друга в повторяющейся последовательности
Я применил резисторы сопротивлением 10 кОм, которые подтягивают уровень напряжения на входах каждого таймера 555 таким образом, что таймеры действительно находятся в статическом состоянии. Конденсатор емкостью 0,01 мкФ подключается между выходом одного таймера и входом следующего. Таким образом, они остаются изолированными друг от друга, а конденсатор всего лишь передает отрицательный перепад напряжения, когда один из таймеров заканчивает формирование выходного импульса и на его выходе устанавливается сигнал низкого логического уровня, что приводит к запуску следующего таймера.
С правой стороны я использовал времязадающие резисторы с сопротивлением 10 кОм и конденсаторы емкостью 22 мкФ, предназначенные для генерирования цикла длительностью порядка четверти секунды, за исключением самого верхнего таймера, у которого времязадающий резистор имеет сопротивление 8,2 кОм.
Причина, по которой это сделано, связана с тем, что таймеры будут все время ожидать начального импульса друг от друга, а таймеры 2 и 4 или 1 и 3 могут запускаться вместе. Задавая для одного таймера более короткий цикл, чем для других, я минимизирую эту проблему.
Светодиоды добавлены для того, чтобы предоставить некоторую визуальную картину того, что происходит в схеме. Без этих светодиодов, если вы случайно сделаете ошибку при подключении проводов, двигатель может вращаться взад или вперед в неправильном режиме, и при этом вы не будете понимать того, что происходит. Вначале вы можете запустить вашу схему только с подключенными светодиодами, только для того, чтобы проверить, что она работает. На рис. 5.108 (ЦВ-рис. 5.108) приведена собранная на макетной плате схема перед подключением двигателя. Затем с помощью проводов вы должны соединить двигатель с макетной платой, где вы должны выполнить подключение с выходами таймеров (выводы 3) (рис. 5.109, ЦВ-рис. 5.109).
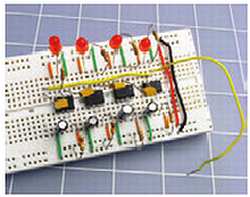
Рис. 5.108. Чтобы проверить управляющую схему на наличие ошибок, используются четыре светодиода, которые подключены к выводам таймеров 555. Подключите желтый провод, показанный на правой стороне рисунка, к выводу 2 первого таймера. Чтобы выполнить сброс таймеров, свободным концом этого провода коснитесь положительного вывода источника питания, а затем для выполнения запуска таймеров, если это необходимо, выполните кратковременное его подключение к отрицательному выводу источника
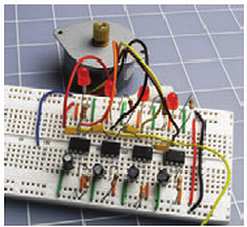
Рис. 5.109. После того как схема была протестирована, может быть добавлен двигатель путем подключения его управляющих проводов к выводам четырех таймеров 555
Подайте напряжение питания, и вы увидите, что двигатель будет поворачиваться шагами синхронно с включением светодиодов. Если последовательность включения светодиодов нестабильна, то:
1. Подключите провод напрямую от входа (вывод 2) самого верхнего таймера к положительному выводу источника питания, а затем подождите, пока таймер не остановится.
2. Повторно запустите последовательность, отключая свободный конец этого провода или (если это необходимо) касаясь им на короткое время отрицательного вывода источника питания, чтобы запустить первый таймер. Есть одна вещь, которую вы можете заметить, если будете очень внимательными: общий вывод шагового двигателя подключен к положительному выводу источника питания. Поэтому, когда каждый таймер формирует положительный сигнал, этот положительный сигнал на самом деле не включает двигатель.
Двигатель приводят в движение только сигналы низкого логического уровня на выходах таймера. С такой конструкцией кажется все понятно. Далее вам следует усвоить некоторые теоретические данные.
Внутри шагового двигателя
Если вы на сайте Википедии обратитесь к статье, посвященной шаговым двигателям, то можете найти 3D-изображение очень хорошего качества, на котором будет показан зубчатый ротор и 4 окружающие его обмотки. Может быть, такие шаговые двигатели и были как-то один раз изготовлены, но не более того.
Представьте два горизонтальных ряда катушек электромагнитов. В пространстве между ними находится серия небольших магнитов, как в товарном поезде, который может двигаться влево или вправо, как это показано на рис. 5.110 и 5.111.
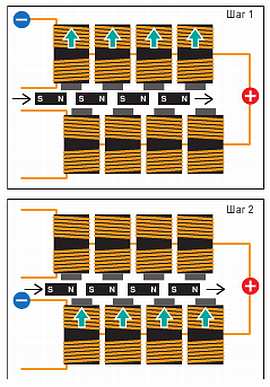
Рис. 5.110. Эта последовательность показывает два первых шага движения ротора шагового двигателя (показана как последовательность магнитов с северными и южными полюсами) в ответ на поступление импульсов на обмотки электромагнитов
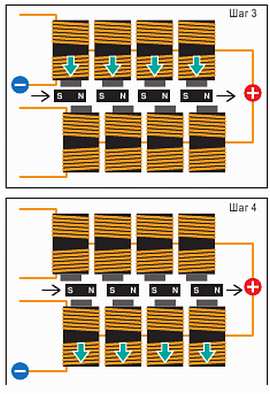
Рис. 5.111. После выполнения двух других шагов двигатель будет возвращен в то положение, с которого он начинал вращение на шаге 1, показанном на рис. 5.110
Каждая катушка имеет две обмотки, которые намотаны в противоположных направлениях, таким образом, чтобы ток через одну обмотку создавал магнитное поле, направленное вверх, а ток через другую обмотку создавал магнитное поле, направленное вниз. Каждый ряд обмоток соединен параллельно таким образом, чтобы они включались и выключались одновременно.
При выполнении шага 1 отрицательный вывод источника питания подключается к верхним обмоткам верхних катушек электромагнитов, которые создают магнитное поле, направленное вверх. Я показал его воздействие стрелками сине-зеленого цвета, чтобы вы не перепутали их с направлением тока. Так случилось, что эта магнитная сила притягивает северные полюса магнитов и отталкивает южные полюса, поэтому, если магниты сначала находятся в положении, которое показано на шаге 1, то они начнут перемещаться вправо.
Это приведет к тому, что они перейдут в положение, которое показано на шаге 2. Теперь включаются верхние обмотки нижних электромагнитов, и это снова приводит к появлению силы, которая направлена вверх и так же притягивающая северные полюса постоянных магнитов и отталкивающая южные. Это взаимодействие приводит к перемещению магнитов в положение, которое показано на шаге 3.
Теперь включаются нижние обмотки верхних электромагнитов, создавая силу, направленную вниз. Это приводит к отталкиванию северных полюсов постоянных магнитов и притягиванию южных. Таким образом, магниты продолжают двигаться слева направо. Теперь они перейдут в положение, которое показано на шаге 4.
Теперь включаются нижние обмотки нижних электромагнитов, и это снова приводит к появлению силы, которая направлена вниз и которая продолжает притягивать южные полюса и отталкивать северные. Таким образом, магниты перемещаются в том же направлении к последнему шагу. В этом случае их положение совпадает с расположением, показанным на шаге 1. Таким образом, рассмотренный процесс может повторяться снова и снова.
На практике магниты не отделяются друг от друга. Край ротора намагничивается в зоне, которая находится напротив пространства между южным и северным полюсами. Кроме того, вместо большого количества катушек, они имеют всего лишь четыре обмотки, которые намотаны на всех магнитных сердечниках. Но принцип остается совершенно таким же. Изображение в формате 3D дает общее представление (рис. 5.112), а на фотографии (рис. 5.113) видно, что я обнаружил, когда разобрал стандартный шаговый двигатель. Таким образом, рис. 5.112 и 5.113 могут помочь вам понять то, как на самом деле устроены шаговые двигатели.
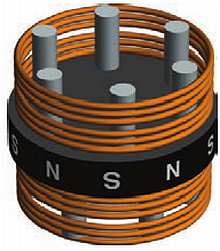
Рис. 5.112. Это изображение в формате 3D дает большее представление о том, каким образом выглядит внутри шаговый двигатель. Медные обмотки и серые цилиндры являются стационарными, а черные диски вращаются между ними

Рис. 5.113. Если разобрать шаговый двигатель, то это будет что-то похожее на это, что вы обнаружите внутри. Слева показан ротор двигателя, который имеет магнитный пояс по окружности, он прочно прикреплен к нижней половине корпуса. Справа верхняя половина корпуса в открытом состоянии и со снятыми катушками (фактически, как вы можете видеть, обмотка состоит из двух катушек, намотанных в противоположном направлении). Выступы это магнитные сердечники, которые приводят в движение ротор
Теперь представьте, что это устройство приводится в действие таймерами 555, в этом случае нам не надо каждый раз подключать отрицательный вывод источника питания к какому-то одному проводу, оставляя остальные провода неподключенными. В действительности в любой заданный момент на выходах трех таймеров имеются отрицательные сигналы, и только на одном четвертом положительный сигнал. Эту ситуацию демонстрирует последняя схема на рис. 5.111.
Теперь предположим, что на верхний по схеме провод подается положительный сигнал, когда на остальные три поступают отрицательные, как это показано на рис. 5.114.
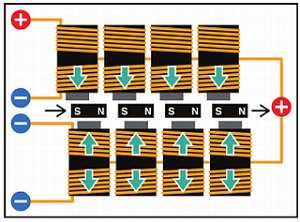
Рис. 5.114. Когда двигатель управляется с помощью четырех таймеров 555, они запускают его, исполняя роль приемников положительного напряжения, которое подается на все катушки электромагнитов двигателя. Внутреннее функционирование двигателя выглядит примерно так, как это показано на рисунке. Это не самый эффективный способ выполнения такой работы
Положительный сигнал не оказывает никакого воздействия, поскольку он сбалансирован напряжением, поступающим на другие концы обмоток с общего положительного вывода источника питания. На оба провода нижних катушек электромагнитов подаются отрицательные сигналы, которые создают равные и противоположно направленные силы, которые компенсируют друг друга (потребляя при этом некоторую энергию). Таким образом, суммарный результат данной ситуации будет таким же, что и на шаге 3 (см. рис. 5.111).
Фактически вы должны обнаружить, что вы при использовании шагового двигателя с таймерами 555 можете полностью отсоединить общий провод. Даже в этом случае двигатель будет продолжать вращаться, потому что один из таймеров выдает положительный сигнал в то время, как остальные — отрицательный. На практике такое использование двигателя более эффективно.
Управление скоростью
Если вы были внимательны, то, наверное, уже заметили, что в схеме управления шаговым двигателем, представленной на ЦВ-рис. 5.108, я у таймера оставил неподключенным каждый вывод 5. Обычно этот вывод заземляется через конденсатор для предотвращения попадания импульсов напряжения питания, которые могут повлиять на точность работы микросхемы.
Я оставил выводы неподключенными, поскольку у меня есть относительно них некоторые идеи. Фактически изменение частоты выходных импульсов микросхемы это именно то, что мы хотим сделать сейчас для того, чтобы можно было изменять скорость вращения шагового двигателя.
Если вы соедините все выводы 5 таймеров 555 вместе, как это показано на рис. 5.115, и установите подстроечный потенциометр с сопротивлением 2 кОм (показан на рис. 5.116) между ними и минусовым выводом источника питания, то увидите, что при повороте потенциометра в сторону уменьшения его сопротивления таймер начнет срабатывать быстрее.
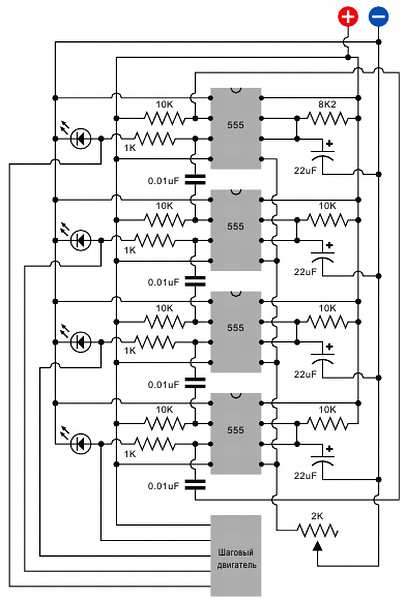
Рис. 5.115. Чтобы отрегулировать частоту последовательности импульсов таймеров 555, их управляющие выводы (вывод 5 каждого таймера) должны быть соединены друг с другом и присоединены к подстроечному потенциометру, который регулирует сопротивление между этими выводами и минусовым выводом источника питания
Рис. 5.116. Крупный план подстроечного потенциометра с выводами, которые находятся на расстоянии 1/10'' (2,54 мм) друг от друга, что соответствует расположению отверстий на макетной или перфорированной плате. Латунный винт, показанный в верхнем правом углу потенциометра на рисунке, поворачивает червячную передачу внутри устройства, давая возможность точно настроить его сопротивление
На рис. 5.117 показано расположение всех элементов на макетной плате. В конечном счете, когда сопротивление становится чуть меньше 150 Ом, все останавливается. Светодиоды гаснут, потому что вы уменьшили напряжение на выводе 5 ниже порогового уровня, который таймер 555 считает приемлемым.
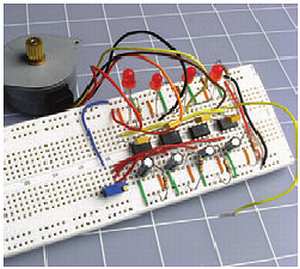
Рис. 5.117. Подстроечный потенциометр был добавлен в схему для того, чтобы получить возможность управлять скоростью шагового двигателя
Изначально я предлагаю установить время шага, равное 0,25 сек, только для того, чтобы вы могли увидеть, что происходит. Когда вы на практике будете использовать эту схему, вам вряд ли понадобится столь медленная скорость. Поэтому вы можете увеличить сразу весь диапазон регулируемых скоростей. Удалите конденсаторы емкостью 22 мкФ и замените их, например, конденсаторами емкостью, скажем 4,7 мкФ или даже меньше. Теперь, когда вы будете выполнять регулировку потенциометром, то наверняка добьетесь нужного диапазона скоростей.
Добавление автономности
В настоящее время схема выполняет только то, что вы хотите, чтобы она делала. Следующий шаг это сделать ее автономной — другими словами, создать иллюзию, что она все выполняет по собственному разумению. Я считаю, что вместо подстроечного потенциометра мы могли бы установить фотоэлемент, который известен, как фоторезистор. Обычно сопротивление фоторезистора на основе сульфида кальция самое высокое в темноте и самое низкое на свету.
Для фоторезисторов существует одна проблема — они не столь широко доступны, как другие электронные компоненты. Если вы поищите их, например, на сайте компании Mouser Electronics (http://www.mouser.com), то практически ничего не найдете. Частично это связано с тем, что поиск в режиме он-лайн на этом сайте — это самое слабое его место, а частично это связано с тем, что этот сайт изначально не был ориентирован на любителей электроники. Вы должны выполнить поиск изделий (product search). Для этого надо перейти на сайт http://www.google.com/products и ввести в качестве поискового запроса «CdS» и «photocell» (фотоэлемент) и вы должны найти группу дешевых компонентов на базе сульфида кадмия там, где раньше вы никогда бы и не подумали их искать.
Поскольку мне кажется, что фоторезисторы приходят и уходят так же относительно быстро, как и двигатели постоянного тока, то я не предлагаю вам детали с конкретной маркировкой. Вы можете купить любые фоторезисторы, которые имеют соответствующее минимальное сопротивление (при ярком свете) и максимальное сопротивление (в темноте). Если вы найдете компонент, у которого диапазон изменения сопротивления будет от 500 до 3000 Ом, то это будет хороший выбор. Если вы сможете найти фоторезисторы только с минимальным сопротивлением более 500 Ом, то вы можете рассмотреть вариант с установкой двух резисторов параллельно.
Монтаж вашего робота, который идет по лучу света
Почему вы хотите управлять скоростью шагового двигателя с помощью фоторезистора? Это потому, что исходной задачей является именно построение робота, который должен «следовать» за светом.
Идея достаточно проста: надо использовать два шаговых двигателя, причем каждый из их должен управлять одним колесом тележки. Кроме того, надо применить два фоторезистора, каждый из которых управлял бы скоростью противоположного двигателя.
Когда правый фоторезистор освещается светом сильнее, его сопротивление падает, вынуждая левую группу таймеров работать быстрее, что, в конечном счете, заставляет правое колесо вращаться быстрее левого. Таким образом, тележка и будет поворачиваться по направлению к свету. Эту идею иллюстрирует рис. 5.118.
Рис. 5.118. Если два фоторезистора управляют скоростью своей группы таймеров 555, то разность в скорости вращения соответствующих колес может повернуть тележку по направлению к источнику света
Прежде чем начать монтаж схемы с таким большим количеством таймеров 555, можно рассмотреть другой вариант выполнения аналогичной функции с использованием более пригодных компонентов. Микросхемы ULN2001A и ULN2003A являются микросхемами, которые содержат транзисторные усилители Дарлингтона (Darlington) специально спроектированные для подачи тока на индуктивные нагрузки, например, на соленоиды, реле и, как вы уже, наверное, догадались, в двигатели. Каждая микросхема имеет семь усилителей, входные выводы которых потребляют очень небольшой ток, а выходы, могут выдавать ток величиной до 500 мА.
Входы усилителей являются ТТЛ- и КМОП-совместимыми (причем микросхема ULN2001A имеет более широкий диапазон по напряжению, чем ULN2003A), а каждый усилитель микросхемы функционирует как инвертор, поэтому, если на входе присутствует сигнал низкого логического уровня, то на выходе появляется сигнал высокого уровня. Это именно то, что вам нужно, для нашего шагового двигателя, у которого общий контакт является положительным.
Поскольку микросхема ULN2001A представляет собой всего лишь усилитель, поэтому вы должны добавить к нему счетчик, который будет считать от 1 до 4, а затем снова начнет свой отсчет.
Разумеется, вы можете продолжить собирать схему с использованием таймеров 555, потому что вы уже начали их устанавливать, или заменить их практически любым восьмеричным или десятичным счетчиком, которые будут посылать свои выходные импульсы сразу на несколько выводов. В качестве выхода «переноса» (carry) для повторного запуска последовательности счета используйте выходной сигнал c пятого вывода. Я предлагаю КМОП-счетчик просто потому, что он работает от напряжения питания 12 В, поэтому вы можете использовать тот же самый источник питания, который используется для электродвигателей.
Если вы решите применить КМОП-счетчики, то вам все равно понадобится пара таймеров 555 для генерирования тактовых импульсов для счетчиков. Таймеры будут работать в несинхронизированном автоколебательном режиме, а фоторезисторы управлять их частотой. Такая конструкция показана на рис. 5.119.
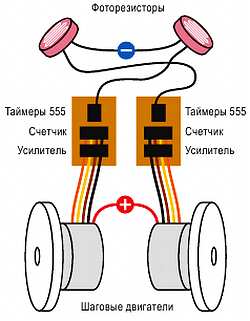
Рис. 5.119. Более эффективный способ эксплуатации двигателей это использовать для каждого из них один таймер для задания скорости вращения каждого колеса, счетчик и усилитель (такой, например, как транзисторный усилитель Дарлингтона) для передачи управляющих импульсов по проводам. В любом случае принцип работы будет какой-то такой
Одна последняя деталь — вам понадобится батарейка на 12 В. Вы, конечно, можете соединить вместе 8 батареек АА, но я думаю, что вы должны предусмотреть аккумуляторный блок, который можно приобрести на таком источнике, как http://www.all-battery.com, на котором есть раздел, посвященный батарейкам для роботов.
Если соедините все вместе и установите вашу роботизированную тележку в очень темной комнате, то обнаружите, что она будет поворачиваться по направлению к лучу от яркого, хорошо сфокусированного фонарика. Для получения боле надежного результата вам может понадобиться поместить фоторезисторы в небольшие трубки таким образом, чтобы они получали как можно больше света, когда они будут направлены на луч фонарика, чем в том случае, когда они будут повернуты несколько в сторону.
Общее представление об устройстве тележки вы можете получить, обратившись к ее изображению в 3D-формате (рис. 5.120).
Рис. 5.120. Данное изображение в 3D-формате показывает возможный вариант конструкции роботизированной тележки, двигающейся по лучу, с двумя фоторезисторами, прикрытыми небольшими трубками для ограничения их угла зрения
Другой идеей будет изменение схемы тележки таким образом, чтобы она, наоборот, «убегала» от света. Есть ли у вас какие-нибудь мысли, как это можно было бы сделать?
Всего лишь одно предложение — если вы примените инфракрасные фоторезисторы, то сможете управлять тележкой с помощью лучей инфракрасных светодиодов при нормальном освещении комнаты. Если у вас и ваших друзей будут инфракрасные передатчики, то вы можете заставить тележку перемещаться, как послушную собачку, от одного хозяина к другому.
Итак, мы практически дошли до такого места, до которого я хотел продвинуться при рассмотрении робототехники. Если же вы хотите углубиться в эту область, то я предлагаю вам ознакомиться с соответствующей дополнительной информацией в Интернете. Кроме того, для сбора робота вы можете приобрести большое количество различных наборов, хотя, конечно, мне кажется, что гораздо интереснее придумать и разработать что-либо самостоятельно.
Все, что мне осталось — это представить вам один последний вводный курс в устройство, которое сделает вашу жизнь намного проще, даже, если это устройство само по себе гораздо сложнее того, с чем вы когда-либо имели дело до этого.
Эксперимент 34. АППАРАТНОЕ ОБЕСПЕЧЕНИЕ ВСТРЕЧАЕТ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
По всему тексту данной книги в соответствии с ее целевой установкой — изучаем, совершая открытия — я предлагал вам сначала проделать эксперимент, после чего я указывал на общие принципы и идеи, которые мы получаем на его основе. Теперь я должен изменить эту методику, поскольку следующий эксперимент включает в себя столь большую предварительную часть, вынуждая меня рассказать вам то, что вас ожидает, до того, как вы начнете что-то делать.
Мы собираемся вступить в королевство контроллеров, которые часто называют микроконтроллерами и обозначают, как MCU, что является сокращением от «micro controller unit» — микропроцессорное устройство управления. Микроконтроллер содержит флеш-память некоторого объема, в которой хранятся программы, которые вы можете написать самостоятельно. Флеш-память похожа на память в портативном медиаплеере или в карте памяти, которую вы используете в цифровом фотоаппарате. Она не требует электроэнергии при ее эксплуатации. Дополнительно к этому микросхема микроконтроллера имеет процессор, который и должен обрабатывать инструкции вашей программы. Он имеет оперативную память (RAM — Random Access Memory) для временного хранения значений и постоянное запоминающее устройство (ROM — Read-Only Memory), которое указывает контроллеру, как выполнять задачи, например, определять изменение входного напряжения и преобразовывать его в цифровую форму для внутреннего использования. Микроконтроллер также содержит прецизионный генератор, что дает возможность синхронизировать все процессы во времени. Если собрать все перечисленное вместе, то микроконтроллер, по сути, представляет собой крошечный компьютер, который к тому же можно купить всего лишь за $5.
Предположим у вас есть теплица, температура в которой никогда не должна падать ниже точки замерзания. Вы установили датчик температуры, и у вас имеется два разных нагревательных прибора (обогревателя). Вы хотите включать первый обогреватель, если температура упадет ниже 6 °C. Но, если по какой-либо причине обогреватель сломается, то вам нужно включить второй резервный обогреватель, когда температура упадет ниже 5 °C.
Запрограммировать микроконтроллер, чтобы он выполнял это, действительно очень просто. Вы даже можете добавить дополнительные функции. Например, если у вас будет второй датчик температуры на случай выхода из строя первого, то вы можете указать микроконтроллеру, чтобы он пользовался показаниями того датчика, который дает минимальное значение температуры.
Другим применением микроконтроллера может быть детально продуманная система охранной сигнализации. Микросхема может отслеживать состояние различных датчиков, регистрирующих проникновение, и выполнять различные заранее запрограммированные шаги в зависимости от состояния датчиков. Вы также можете добавить различные задержки времени до срабатывания охранной системы.
Многие микроконтроллеры обладают дополнительными крайне полезными встроенными функциями, как например, способностью управлять серводвигателями, которые поворачиваются на определенный угол после подачи определенного набора импульсов. Серводвигатели широко используются в радиоуправляемых моделях катеров, самолетов и любительских роботов.
Возможно вы будете удивлены, если микроконтроллеры могут все это делать, то почему же мы не использовали их раньше? Зачем я потратил такое огромное количество времени, описывая разработку охранной сигнализации, используя отдельные компоненты, если все это может сделать одна микросхема микроконтроллера?
На это есть три ответа:
1. На самом деле, одна микросхема микроконтроллера совершенно все выполнить не может. Для ее работы требуется использование и других компонентов, которые помогают ей взаимодействовать с окружающим миром, например, транзисторы, реле, датчики и усилители. Чтобы достаточно разумно их использовать, вам необходимо знать каким образом все эти элементы работают.
2. Микроконтроллеры могут вносить различные проблемы и ошибки, которые присущи только им и которые связаны с совместным использованием программного и аппаратного обеспечения. Позже я остановлюсь на этом более подробно.
3. Микроконтроллеры имеют свои определенные требования и ограничения, для большинства из них требуется стабилизированный источник питания напряжением 5 В, и их выводы не могут быть источником или приемником достаточно большого тока. Кроме того, для их использования требуется знание языка программирования, который может отличаться, в зависимости от типа микроконтроллера, а чтобы загрузить программу в микросхему, вы должны иметь возможность подключить ее к компьютеру и только после этого выполнить загрузку, что не всегда удобно.
В данном эксперименте вы научитесь писать программы для небольшого и простого микроконтроллера, перенесете эту программу в его память, а также увидите, как она работает.
Основы программируемых микросхем
На заводах и в лабораториях встречается очень большое количество различных операций, которые являются повторяющимися. Например, датчик расхода электроэнергии может управлять нагревательным элементом, датчик движения может регулировать скорость вращения двигателя. Микроконтроллеры являются идеальным средством для решения таких рутинных задач.
Компания под названием General Instrument представила первую линейку микроконтроллеров еще в 1976 году и назвала их PIC, что означает Programmable Intelligent Computer (программируемый интеллектуальный компьютер) — или Programmable Interface Controller (программируемый интерфейсный контроллер), в зависимости от источника сведений. General Instrument продала этот бренд другой компании Microchip Technology, которая владеет им на данный момент.
«PIC» это торговая марка, но иногда используется и в качестве общего термина, как например, лента «скотч» (Scotch tape). Для данной книги я выбрал линейку контроллеров на основе PIC-архитектуры. Лицензия на них принадлежит британской компании Revolution Education Ltd., которая называет эту линейку микросхем PICAXE, никакого смысла это называние не имеет за исключением того, что стильно звучит.
Мне нравятся эти микроконтроллеры, потому что они изначально проектировались, как средство обучения и поэтому очень просты в использовании. Кроме того, они очень дешевы, а некоторые из них обладают достаточной вычислительной мощностью. Несмотря на странное наименование, я думаю, что они представляют собой наилучший выбор для знакомства с базовыми концепциями применения микроконтроллеров.
Если после «игр» с PICAXE вы захотите продвинуться дальше в область микроконтроллеров, то я предлагаю обратить внимание на BASIC Stamp (в которых используется очень похожий язык, но при этом есть дополнительные мощные команды), а также на крайне популярный Arduino (который имеет более современную структуру, обладает мощными функциями, но требует от вас изучения версии языка C для его программирования). Я более подробно остановлюсь на этих микросхемах позднее.
Если вы выполните поиск по запросу «picaxe» в Wikipedia, то найдете замечательное введение, в котором описаны все разнообразные функции этого компонента. Фактически это более четкий обзор, чем тот, которые вы можете увидеть на веб-сайте компании Revolution Education Ltd.
Необходимые материалы
На рис. 5.121 приведены обозначения выводов некоторых микросхем из линейки микроконтроллеров PICAXE. Я расскажу вам, как можно использовать самый маленький микроконтроллер — PICAXE 08M — который стоит менее $5 и который дешевле, чем какой-либо другой микроконтроллер, найденный мною. У него имеется всего лишь 256 байт памяти для хранения программы (не гигабайт, мегабайт или килобайт, а всего лишь 256 байт!), но вы будете удивлены тем количеством возможностей, которые позволяет такой небольшой объем.
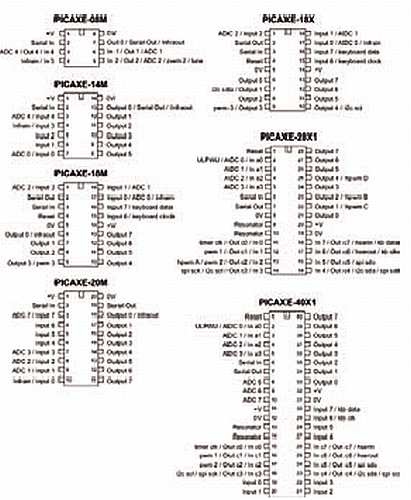
Рис. 5.121. Страница из каталога компании Revolution Education Ltd. перечисляет всего лишь несколько микросхем, которые можно приобрести. То, что начиналось как средство для обучения, стало очень полезным средством для разработки оборудования и инструментов
На рис. 5.122 показан внешний вид микроконтроллера PICAXE 08M, выводы которого для безопасности погружены в кусочек проводящей губки.

Рис. 5.122. При приобретении микроконтроллер PICAXE 08M обычно установлен на проводящую губку. Микросхема имеет те же размеры, что и 555 таймер 555, но обладает вычислительной мощью небольшого компьютера
В США имеется три продавца этих микросхем:
• http://www.advancedmicrocircuits.com
• http://www.phanderson.com/picaxe
• http://www.sparkfun.com
Мне нравится P. H. Anderson за его ориентацию на интересы любителей электроники, а также потому, что он предоставляет хорошие цены, если вы хотите купить несколько микросхем. Но ресурс компании SparkFun Electronics предлагает другие сопутствующие продукты, которые вы можете найти интересными.
Все дистрибьюторы хотят продавать «наборы для начинающих», один из которых показан на рис. 5.123, наверное потому, что микроконтроллеры PICAXE сами по себе настолько дешевы, что на них большой прибыли не сделаешь. Все же для наших целей вам нужно купить только микроконтроллер, и лучше купить две микросхемы только для того, чтобы иметь запас на случай повреждения первого (например, при неправильном подключении напряжения).
Рис. 5.123. Типичный набор элементов с микроконтроллером PICAXE включает в себ я печатную плату, которая вам, может быть, и не понадобится, и некоторые другие не слишком существенные компоненты. Но гнездо 3,5-мм для стереосигнала (показанное вверху, в центре) абсолютно необходимо
Чтобы загрузить инструкции программы в микроконтроллер, сначала надо набрать эти инструкции в редакторе на компьютере, а затем их нужно будет по кабелю передать в память микроконтроллера PICAXE. Таким образом, вам нужно купить соединительный интерфейсный кабель и соответствующее программное обеспечение для того, чтобы записать программу.
Для работы с микроконтроллерами PICAXE вы можете воспользоваться последовательным кабелем, но я его не рекомендую. Старый стандарт RS-232 для последовательного обмена данными в ПК в значительной степени устарел, а микроконтроллер PICAXE может быть распознан только при наличии USB-кабеля (который содержит конвертер преобразования данных внутри вилки). Кабель с интерфейсом USB несколько более дорог, но он проще и совместим с компьютерами Apple. Таким образом, у одного из дистрибьюторов в США следует купить USB-кабель — компонент AXE027, он также продается, как компонент PGM-08312 на сайте http://www.sparkfun.com. Количество — 1 шт. Кабель показан на рис. 5.124.

Рис. 5.124. Интерфейсный USB-кабель для загрузки программного кода в микроконтроллеры PICAXE требует для подключения аудиоразъем под вилку 3,5-мм. Кабель должен вставляться в любое аудиоустройство. Он обеспечивает по следовательное подключение к компьютеру, предоставляя возможность загрузить в микросхему микроконтроллера программный код
Для составления программы и передачи ее по проводу в память микросхемы вам требуется программа-редактор Pro gramming Editor. Эта программа работает только в операционной среде Windows. Для тех, кто предпочитает работать с Mac OS или Linux, можно выбрать другую программу, которая известна, как AXEpad, у которой меньше функций, но она тоже в состоянии выполнить эту работу. Все загружаемое программное обеспечение можно найти в свободном доступе на сайте http://www.rev-ed.co.uk/picaxe/software.htm.
Наконец, вам обязательно понадобится аудиоразъем под вилку 3,5-мм с контактами для припаивания (рис. 5.125). Это нужно потому, что производители микроконтроллеров PICAXE в интер-фейсном USB-кабеле используют стереоаудиовилку, и таким образом у вас будет возможность подключить ее в соответствующее гнездо. Адаптер макетной платы PICAXE, который называется SparkFun и имеет номер по каталогу DEV-08331, содержит необходимое гнездо вместе с другими позициями небольшого размера. Количество — 1 шт.
Достаточно странно, но USB-кабель это самая дорогая позиция в списке, в связи с тем, что у него внутри есть скрытая электроника.

Рис. 5.125. Общий вид гнезда 3,5-мм, которое используется вместе с интерфейсным USB-кабелем для программирования микроконтроллера
Установка и настройка программного обеспечения
Теперь вам нужно выполнить процедуру установки программного обеспечения. Этого никак избежать нельзя. Далее следует описание того, что вы должны сделать.
1. Установите драйвер, чтобы ваш компьютер мог распознать специальный USB-кабель.
2. Установите программу-редактор Programming Editor (или AXEpad для Mac/Linux) таким образом, чтобы ваш компьютер смог помочь вам при написании программ и загрузке их в микроконтроллер.
3. На макетную плату установите микроконтроллер PICAXE и добавьте гнездо для подключения интерфейсного USB-кабеля и выполнения загрузок.
Эти шаги более подробно описаны в последующих разделах.
Драйвер USB
Справедливое предупреждение — если вы зайдете на веб-сайт PICAXE и попытаетесь использовать функцию поиска, то возможно не найдете то, что хотите. Например, поиск с запросом «USB Driver» (драйвер USB) даст такой результат, что как будто о нем на сайте ничего неизвестно.
На домашней странице PICAXE есть также раздражающие выпадающие меню, которые имеют тенденцию к исчезновению, как только вы хотите щелкнуть по какой-либо опции, но в случае скачивания необходимого программного обеспечения вы можете перейти прямо на страницу загрузки по адресу http://www.rev-ed.co.uk/picaxe/software.htm, обходя эти меню. Пролистайте все программное обеспечение до тех пор, пока не доберетесь до Additional Resources (дополнительные ресурсы).
Примечание
Будьте внимательны, чтобы по ошибке не загрузить драйвер для последовательного USB-адаптера USB010. Последовательный USB-адаптер это что-то совершенно другое.
Найдите USB-кабель AXE027 для загрузки — AXE027 PICAXE USB Download Cable. На первый взгляд это выглядит так, как предложение кабелей для продажи, но фактически это список драйверов. Нужно дважды щелкнуть по той опции, которая соответствует вашему компьютеру, и выбрать место на вашем компьютере для сохранения файла. Следует выбрать такое место, где вы легко сможете найти этот драйвер, например, ваш рабочий стол.
Драйвер вы загрузите в виде заархивированной папки с файлами. Ее надо распаковать. В Windows XP надо щелкнуть правой кнопкой и выбрать опцию «Extract all» (Извлечь файлы). Просмотрите распакованные файлы и найдите руководство по установке в PDF-формате. Пользователи Linux и Mac могут найти инструкции, которые находятся в файле по адресу http://www.rev-ed.co.uk/docs/AxE027.pdf.
При установке драйвера на платформу Windows далее приведены несколько советов по минимизации раздражающих факторов.
1. Не забудьте, что этот специальный USB-кабель содержит электронику. Это не только кабель, а также устройство, спроектированное для взаимодействия с микросхемой микроконтроллера PICAXE. Не следует пытаться использовать его для какой-либо другой цели!
2. Вы должны вставить кабель в USB-порт до того, как установили драйвер, потому что ваш компьютер должен проверить, что этот драйвер соответствует кабелю.
3. Вы не должны присоединять микроконтроллер PICAXE к другому концу кабельного устройства после того, как вы уже установили драйвер.
4. Каждый USB-порт на вашем компьютере имеет отдельный идентификатор. Когда бы вы ни выбрали порт для первой установки кабеля, вы должны использовать тот же самый порт каждый раз в будущем. В противном случае надо будет повторить процесс, сообщая вашему компьютеру, что является кабелем.
5. Не забывайте о предыдущем совете — вам не следует использовать кабель для установки в автономный USB-концентратор.
6. Кабель «дурачит» микроконтроллер PICAXE, заставляя его считать, что он обменивается данными с последовательным портом вашего компьютера. Эти порты обмена данными известны, как COM1, COM2, COM3 или COM4. Когда вы установили драйвер, программа установки выберет для вас один из COM-портов, и позднее вы узнаете который из них. Руководство в PDF-формате должно помочь вам выполнить эту процедуру.
Редактор для программирования
Если вы дошли до этого места, то, наверное, уже готовы сделать следующий большой шаг, который не так-то уж сложен.
Вам нужен редактор для программирования микроконтроллера PICAXE, который можно бесплатно загрузить с веб-сайта со страницы загрузок, где вы нашли USB-драйвер. (Если вы используете операционную систему Mac или Linux, то вам понадобится редактор AXEpad, который есть на этой же странице).
Загрузка и установка редактора для программирования должна проходить просто и безболезненно. После того как вы это сделаете, на рабочем столе вашего компьютера вы должны найти соответствующий значок для загрузки программы. Дважды щелкните по значку, чтобы перейти к опции view (Вид) → Options (Опции), и в окне, которое после этого открывается (показано на рис. 5.126), щелкните по вкладке Serial Port (Последовательный порт). В результате вы должны увидеть диалоговое окно, такое как на рис. 5.127.

Рис. 5.126. Эта копия экрана показывает вкладку окна с параметрами программы редактирования PICAXE Program Editor, которую вы должны использовать для выбора типа микросхемы для ее программирования (в нашем случае это микроконтроллер 08M)
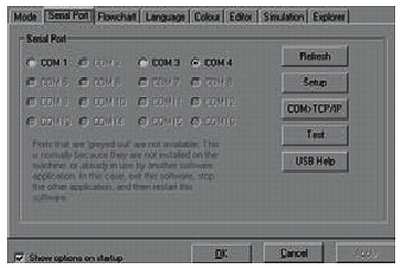
Рис. 5.127. Другая копия экрана окна с опциями отображает второй важный выбор, который вы должны сделать, т. е. выбрать COM-порт среди тех, которые программа установки нашла на вашем компьютере
Теперь следует убедиться, что редактор для программирования выглядит, как тот же самый COM-порт, который был выбран USB-драйвером. В противном случае редактор не сможет обнаружить микроконтроллер PICAXE. В редакторе программирования выберите меню view (Вид) → Options (Опции) и затем перейдите на вкладку Mode (Режим), на которой выберите тип микроконтроллера 08M.
Ну как, находите ли вы это все еще забавным? Очевидно нет, но в настоящий момент вы преодолели трудности программного обеспечения. Последний шаг перед тем, как вы будете готовы использовать микроконтроллер PICAXE, это установка его в гнездо на макетной плате.
Аппаратное обеспечение
Микросхема микроконтроллера PICAXE 08M выглядит так же как таймер 555. (Другие микросхемы серии PICAXE имеют большее количество выводов и больше функций.) Они требуют стабилизированного напряжения 5 В точно также, как логические микросхемы, с которыми вы имели дело ранее. Фактически производители, выпускающие микроконтроллеры PICAXE, очень настойчивы в том, чтобы защитить эти чипы от выбросов напряжения питания. Они хотят, чтобы вы использовали два конденсатора (один на 100 мкФ и один на 0,1 мкФ) с каждой стороны стабилизатора LM7805. Это выглядит, как стрельба из пушки по воробьям, но микроконтроллер PICAXE более удобен для замены, чем таймер 555. Вы определенно не можете обратиться на сайт компании RadioShack, чтобы купить только одну микросхему. Поэтому давайте выполним то, что, как указывает производитель, «на всякий случай», и установим стабилизатор на макетную плату, как это показано на рис. 5.128 и 5.129.
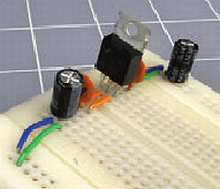
Рис. 5.128. В документации на микроконтроллеры PICAXE указывается на необходимость установки конденсаторов 100 мкФ и 0,1 мкФ со стороны входа стабилизатора напряжения на 5 В, и аналогичной пары конденсаторов со стороны выхода. На макетной плате они могут быть размещены так, как показано на этом рисунке
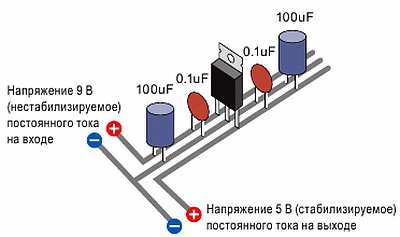
Рис. 5.129. Реальные компоненты для стабилизированного источника питания, установленные на макетной плате, обеспечивают выработку напряжения 5 В
Теперь, что касается самой микросхемы микроконтроллера.
Следует отметить, что выводы микросхемы для подключения минусового и плюсового вывода источника питания расположены точно наоборот относительно выводов питания таймера 555, поэтому следует быть очень внимательными!
На вашей макетной плате выполните монтаж схемы, которая приведена на рис. 5.130.
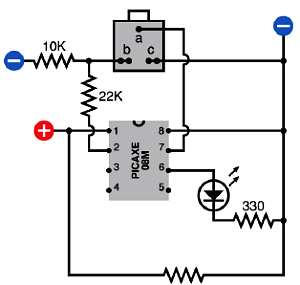
Рис. 5.130. Схема для тестирования микроконтроллера PICAXE 08M, на которой показано подключение стереоразъема под аудиовилку 3,5-мм; при этом большое значение играют резисторы с сопротивлением 10 кОм и 22 кОм, подключенные к входу микроконтроллера, и светодиод, который отображает, какой сигнал имеется на его выходе
Следует заметить, что я показал стереоаудиоразъем под вилку 3,5-мм именно так, как он должен быть установлен на макетной плате. Если же вы попытаетесь вставить его выводы в отверстия на плате, они войдут в нее нормально, но когда вы будете вставлять вилку в разъем, она за счет большой толщины будет поднимать разъем, отрывая его от платы, и поэтому будет теряться контакт.
Я считаю, что лучший путь продолжения работы — это все же припаивание проводов к выводам разъема и затем подключение их к макетной плате (рис. 5.131).
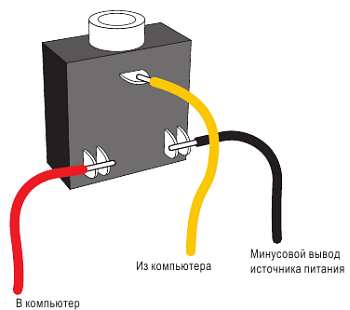
Рис. 5.131. Очень важно верное подключение аудиоразъема. Когда провода припаиваются к нижним выводам разъема, следует убедиться, что вы присоединили провода именно к обоим выводам каждой пары
Надо иметь в виду, что в руководстве по микроконтроллерам PICAXE одни и те же вещи могут быть описаны немного по-разному (хотя я и поддерживаю их подход при обозначении контактов разъемов, которые имеют обозначения «a», «b» и «c»).
Одно небольшое замечание об аудиоразъеме (гнезде под вил ку 3,5-мм), которое обычно поставляется для использования вместе с микроконтроллером PICAXE: обычно он имеет две пары контактов для подключения, обозначенных в руководстве и на моей схеме латинскими буквами «b» и «с». Когда вы припаиваете провод к контактам, ваша пайка должна соединять сразу оба контакта каждой пары, как это показано на рис. 5.131.
Следует напомнить, что микроконтроллер PICAXE должен иметь стабилизированное напряжение питания, равное 5 В постоянного тока, а вам надо иметь в виду, что ваш стабилизатор напряжения нормально будет поддерживать напряжение только в том случае, если на его вход будет подано избыточное напряжение. Если вы на его входе обеспечите напряжение 9 В, то этого будет вполне достаточно.
Резисторы, применяемые в схеме подключения микроконтроллера, с сопротивлением 22 кОм и 10 кОм, имеют очень важное значение; в качестве пояснения см. следующее далее предостережение. Кроме того, на моей схеме подключен светодиод и последовательный с ним резистор с сопротивлением 330 Ом, но эти элементы нужны только для тестирования схемы, которое мы, разумеется, выполним, но чуть позже.
Подключение подтягивающих резисторов к выводу 2
В состав необходимых элементов схемы, которая показана на рис. 5.130, всегда следует добавлять резисторы с сопротивлением 22 кОм и 10 кОм. Эти резисторы применяются для корректирования напряжения при последовательном обмене данных, а когда микроконтроллер PICAXE используется автономно, они задают необходимое напряжение на выводе 2.
Если же вывод 2 останется не подключенным, то на нем могут возникать напряжения произвольной амплитуды, которые микроконтроллер может неверно интерпретировать с непредсказуемыми и нежелательными результатами.
Итак, эти резисторы с сопротивлением 22 кОм и 10 кОм должны быть включены в обязательный список постоянных компонентов, сопровождающих ваш микроконтроллер PICAXE вне зависимости от того подключен он к компьютеру или нет
Проверка подключения
Когда вы хотите запрограммировать или перепрограммировать ваш микроконтроллер PICAXE каждый раз надо тщательно выполнить следующие далее шаги.
1. Вставьте USB-разъем вашего кабеля для подключения микросхемы PICAXE в тот же самый USB-порт, который вы использовали ранее.
2. Запустите программу Programming Editor (или AXEpad, если вы используете операционные системы Mac OS или Linux).
3. В меню программы Programming Editor, выберите view (Вид) → Options (Опции), чтобы проверить, что редактор использует подходящие COM-порт и микроконтроллер PICAXE 08M.
4. Вставьте вилку разъема на конце USB-кабеля в гнездо разъема, уже установленного на вашей макетной плате (рис. 5.132–5.133).
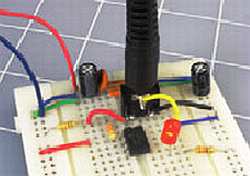
Рис. 5.132. Версия макетной платы тестируемой схемы со вставленной вилкой USB-кабеля в гнездо на плате для загрузки программного обеспечения. Теперь микроконтроллер PICAXE готов получать и загружать программу, а также начать немедленно выполнять ее инструкции
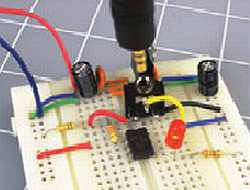
Рис. 5.133. После того как программа была загружена в микроконтроллер, вилка может быть извлечена, и программа будет продолжать свою работу, заставляя мигать светодиод
5. Проверьте правильность монтажа схемы и подключите напряжение питания к вашей макетной плате.
6. В окне программы Programming Editor щелкните по кнопке Program (программа), чтобы указать программному обеспечению выполнить поиск микросхемы PICAXE.
Что делать, если это не работает?
Прежде всего, надо вынуть вилку USB-кабеля из макетной платы с микроконтроллером PICAXE, оставив другой конец кабеля присоединенным к вашему компьютеру. Потом на мультиметре надо установить режим для измерения постоянного напряжения, а затем присоединить щупы измерительных проводов к точкам «b» и «c» на вилке (рис. 5.134). Теперь снова щелкните по кнопке Program, и ваш тестер в течение короткого времени должен показать 5 В, которые подаются вашим компьютером на вилку кабеля.

Рис. 5.134. Вилка стереоразъема на конце USB-кабеля для загрузки программы может быть использована для проверки правильности работы программы. Мультиметр должен быть установлен в режим измерения постоянного напряжения и должен быть подключен к точкам «b» и «c» вилки, чтобы проверить посылает ли программа Programming Editor данные через порт при последовательной передаче данных
Если напряжение присутствует, то программное обеспечение установлено и работает правильно. В этом случае проблема заключается в вашей макетной плате — либо что-то случилось с микросхемой, либо неверно выполнен монтаж схемы.
Если вы не смогли обнаружить какое-либо напряжение, то возможно, что программа установлена неправильно или обращается к ошибочному последовательному порту. Попробуйте деинсталлировать ее и затем снова установите.
Ваша первая программа
Наконец, вы готовы для написания вашей первой программы.
В окне программы Programming Editor наберите следующий текст:
main:
high 1
pause 1000
low 1
pause 1000
goto main
В первой строке после слова «main» не забудьте добавить двоеточие. На рис. 5.135 приведена экранная копия окна программы Programming Editor с набранным текстом. Отступы в тексте программы создаются с помощью клавиши <Tab>. Это используется только для того, чтобы сделать текст программы более удобным для чтения. Программа Programming Editor символы табуляции игнорирует.
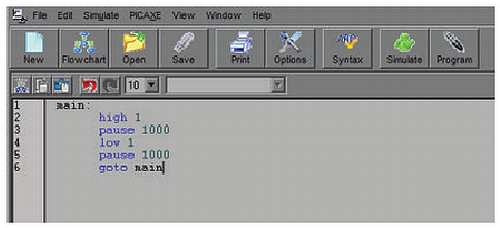
Рис. 5.135. На этой экранной копии приведена ваша первая контрольная программа — так, как она выглядит в программе Programming Editor (на компьютере с ОС Windows)
Чтобы загрузить эту программу в микроконтроллер, в окне редактора Programming Editor щелкните по кнопке Program.
Как только загрузка будет завершена, микроконтроллер начнет управлять светодиодом, который должен загораться и выключаться на 1 сек. На рис. 5.136 показаны шаги, которые нужно выполнить для программирования микроконтроллера.
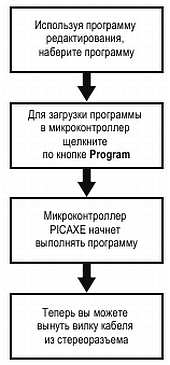
Рис. 5.136. Четыре шага для создания и запуска программы для микроконтроллера PICAXE
Теперь интересная деталь — отключите вилку USB-кабеля от макетной платы. Светодиод, управляемый микроконтроллером, должен продолжать мигать.
Отключите питание от макетной платы и подождите минуту или две, чтобы конденсаторы успели разрядиться. Затем снова включите напряжение питания, светодиод продолжит мигать. Таким образом, программа, которую вы загрузили в микроконтроллер, будет оставаться в его памяти, и будет запускаться каждый раз при подаче питания.
Примечание
Программа не использует обычные номера выводов на микросхеме. Она использует то, что мы будем называть «логическими номерами выводов». На рис. 5.137 показано, каким образом они нумеруются, а на рис. 5.138 приведены их составные функции. Я заключил логический вывод 0 в скобки, поскольку его основное назначение отправлять данные в компьютер по USB-кабелю. Он может быть выводом двойного назначения и использоваться в качестве цифрового вывода, но для использования во втором качестве вы должны сначала отключить его от USB-кабеля. Об этом очень легко забыть. Это именно та трудность, которую я предпочитаю исключить.
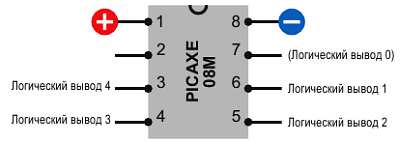
Рис. 5.137. Обычная нумерация выводов на микросхеме микроконтроллера PICAXE не совпадает с нумерацией, которая используется при программировании микроконтроллера PICAXE. Чтобы не путать эти обозначения в руководстве используется название «Логические выводы», когда используется система нумерации, необходимая для программирования микросхемы
Рис. 5.138. Многие выводы микросхемы PICAXE 08M обладают составными функциями, которые могут задаваться соответствующими инструкциями программы
Расшифровка кода
Давайте рассмотрим эту небольшую программу, которую вы набрали в окне редактора. Первая строка определяет фрагмент программы. Эта программа имеет только один фрагмент, который мы назвали «main». Любое слово с двоеточием после него является именем (меткой) фрагмента программы:
main:
Вторая строка указывает микроконтроллеру установить высокий логический уровень сигнала на выходе схемы, т. е. на логическом выводе 1:
high 1
Третья строка программы указывает микроконтроллеру подождать 1000 мсек. Это, естественно, равно паузе длительностью 1 сек:
pause 1000
Четвертая строка указывает микроконтроллеру изменить состояние на логическом выводе 1 и перевести его в низкое состояние:
low 1
Пятая срока опять указывает подождать еще 1000 мсек:
pause 1000
Последняя строка указывает, чтобы он вернулся к началу выполнения фрагмента «main»:
goto main
Редактирование
А что, если вам нужно изменить программу? Нет проблем!
Чтобы заменить одну из строк программы нужно использовать программу редактирования Programming Editor. Например, вместо 1000 введем 100. (В команде pause, используемой для задания временной задержки в микросекундах, может быть любое число вплоть до 65 535.)
Снова подсоедините USB-кабель к макетной плате, в открытом окне программы редактирования щелкните мышью по кнопке Program, и новая версия программы будет автоматически загружена в микроконтроллер и записана вместо старой версии программы.
Что нужно сделать, если вы хотите сохранить программу для ее использования в будущем? Нужно выбрать в меню программы Programming Editor команду File (Файл) и сохранить программу на жестком диске вашего компьютера. Поскольку микроконтроллер PICAXE использует версию компьютерного языка BASIC, то к имени файла автоматически будет добавлено расширение *.bas.
Имитация
Если при наборе команды вы сделаете ошибку, то программа Programming Editor найдет ее и не даст вам загрузить программу в микроконтроллер. Я оставлю вам возможность посмотреть, как программа может определить строку, которая содержит ошибки. Даже, если все инструкции в программе набраны без ошибок, то все равно неплохой идеей будет прогнать ее в режиме имитации, для того чтобы посмотреть, что она выполняет перед тем, как ее загрузить. Это сделать очень просто — надо в строке меню редактора Programming Editor щелкнуть по кнопке Simulate (Имитировать). В результате откроется новое окно, в котором будет отображено схематическое изображение микросхемы микроконтроллера PICAXE и будут показаны состояния его выводов. (Следует заметить, что если вы используете очень короткую задержку с помощью команды pause, то имитация не будет выполняться также быстро, чтобы точно отобразить время). Копия экрана при выполнении имитации показана на рис. 5.139.
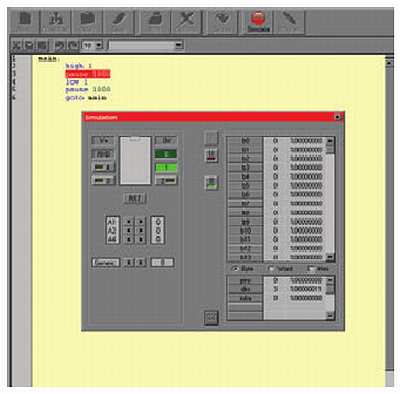
Рис. 5.139. Эта копия экрана показывает окно имитации, которое может быть открыто в редакторе Programming Editor для тестирования программного кода перед его загрузкой в микроконтроллер. Значения переменных показываются в области, которая расположена справа. Состояние выводов показано слева
Кнопка >>, расположенная в нижнем правом углу окна имитации, будет открывать список всех переменных в вашей программе. Правда, сейчас в ней нет никаких переменных, но они скоро появятся. Все нули с правой стороны являются двоичными номерами, которые вы можете игнорировать в настоящий момент.
Примечание
Вы должны изучить вторую часть документации на микроконтроллеры PICAXE, которая содержит программные инструкции и их правильный синтаксис. На момент написания данной книги эти данные доступны в Интернете по адресу: http://www.reved.co.uk/docs/picaxe_manual2.pdf.
Циклы в программе
Здесь описана другая вещь, которую я хочу использовать.
Перепишите ваш программный код так, как это было показано далее, и снова загрузите программу в микроконтроллер PICAXE:
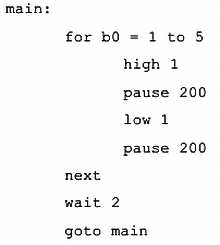
Следует заметить, что b0 это буква b с цифрой 0, а не буква b с буквой O. Дополнительные отступы введены снова для того, чтобы сделать текст программы более читаемым. Четыре строки, начиная с high 1 и до pause 200, будут выполняться несколько раз подряд. Их удобно рассматривать в качестве одного блока.
Посмотрите на вспышки светодиода, и вы увидите, что происходит. Сначала должны быть выданы пять быстрых вспышек, затем последует ожидание в течение двух секунд и далее все повторится. Таким образом, в вашу программу вы только что добавили цикл. Вы можете использовать цикл, если хотите выполнить что-то более одного раза.
Значение b0 называют переменной. Ее можно рассматривать, как небольшую «ячейку памяти» с именем, «b0», которое закреплено на ее внешней поверхности.
Иллюстрирует эту идею рис. 5.140.

Рис. 5.140. Чтобы понять, как работает программа, нужно представить переменную в виде «ячейки памяти» с собственным именем, которое закреплено на ее внешней стороне, и числом, которое находится внутри ее
Эта конкретная ячейка памяти может хранить любое число от 0 до 255. Цикл начинается с указания компьютеру сохранить число 1 в ячейке, а затем выполнять оставшиеся инструкции до тех пор, пока не появится слово next (следующий), которое возвращает компьютер на первую строку; в этой точке к содержимому ячейки b0 добавляется 1. Если число в ячейке b0 будет равно 5 или меньше, то цикл повторяется. Если же значение, хранящееся в ячейке, равно 6, то цикл был уже выполнен 5 раз, поэтому он считается завершенным и микроконтроллер пропускает его выполнение и переходит к выполнению инструкции wait 2, которая расположена после next. Посмотрите на рис. 5.141, на котором приведен текст программы с комментариями.
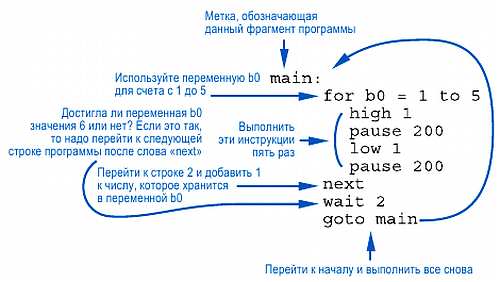
Рис. 5.141. Комментарии, приведенные рядом с кодом, показывают, что программный код заставляет сделать микроконтроллер PICAXE
Команда wait — это команда ожидания микроконтроллера PICAXE, которая задается в секундах, поэтому wait 2 означает, что контроллер ничего не делает в течение 2 сек. Следующая строка кода goto main означает, что процедура должна быть выполнена снова.
Если ваша программа демонстрации мигания светодиодов работает так, как это было запланировано, то настало время перейти к выполнению следующего шага, когда микроконтроллер можно заставить сделать что-нибудь полезное.
Основные характеристики микроконтроллера PICAXE
Здесь приведены некоторые наиболее полезные характеристики микросхемы микроконтроллера PICAXE.
• Для питания микроконтроллера PICAXE требуется стабилизированный источник питания с напряжением 5 В.
• Входы и выходы микроконтроллера PICAXE совместимы с логическими микросхемами с напряжением питания 5 В. Вы можете подключать их напрямую.
• Каждый вывод микросхемы микроконтроллера PICAXE может быть приемником или источником тока величиной до 20 мА. Все выводы микросхемы могут выдавать ток величиной до 90 мА. Это означает, что вы можете подключать светодиоды напрямую к выводам; точно также можно подключать пьезогенератор звука (который потребляет очень небольшой ток) или транзистор.
• Вы можете использовать такую микросхему, как усилитель Дарлингтона ULN2001A (который был упомянут в предыдущем эксперименте), чтобы усиливать выходной сигнал микроконтроллера PICAXE и использовать его для включения реле или двигателя.
• Микроконтроллер выполняет каждую строку вашей программы в течение 0,1 мсек.
• Микросхема PICAXE 08M имеет достаточно флеш памяти для хранения программного кода длиной до 80 строк. Другие микросхемы PICAXE имеют больший объем памяти.
• Микроконтроллер PICAXE поддерживает программный код, в котором может быть до 14 переменных с именами от b0 до b13. Буква «b» означает «byte» (байт), поскольку каждая переменная занимает всего лишь один байт. Каждая их них может иметь значение в диапазоне от 0 до 255.
• В качестве значений переменных нельзя использовать отрицательные или дробные числа.
• Вы можете также использовать 7 двухбайтовых переменных с обозначениями от w0 до w6. Буква «w» означает «word» (слово). Каждая их них может иметь значение в диапазоне от 0 до 65 535.
• Переменные «b» занимают ту же часть памяти, что и переменные «w». Таким образом:
— переменные b0 и b1 используют те же самые байты, что и переменная w0;
— переменные b2 и b3 используют те же байты, что и переменная w1;
— переменные b3 и b4 используют те же байты, что и переменная w2;
— переменные b5 и b6 используют те же байты, что и переменная w3;
— переменные b7 и b8 используют те же байты, что и переменная w4;
— переменные b9 и b10 используют те же байты, что и переменная w5;
— переменные b11 и b12 используют те же байты, что и переменная w6;
— переменные b13 и b14 используют те же байты, что и переменная w7.
Поэтому, если вы применяете в качестве переменной w0, то не можете использовать переменные b0 или b1. Если вы используете переменную b6, то не можете использовать переменную w3 и т. д.
• Значения переменных хранятся в оперативной памяти и пропадают, когда напряжение питания отключается.
• Программа хранится в энергонезависимой памяти, поэтому остается в микросхеме, когда отключается ее источник питания.
• В технических характеристиках производителя утверждается, что энергонезависимая память допускает до 100 000 циклов перезаписывания.
• Если вы хотите подсоединить переключатель или кнопку к выводу микросхемы и использовать их для ввода входного сигнала, то вы должны добавить согласующий резистор с сопротивлением 10 кОм между выводом и отрицательным выводом источника питания, чтобы поддерживать на выводе низкий логический уровень, когда переключатель или кнопка разомкнуты. На рис. 5.142 показано подключение согласующих резисторов при использовании однополюсного однопозиционного переключателя или кнопки.
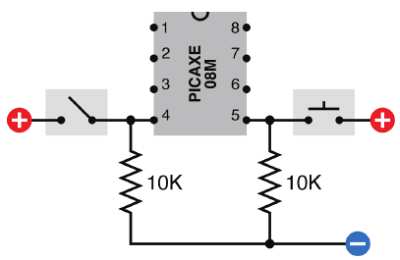
Рис. 5.142. Микроконтроллер PICAXE может откликаться на состояние переключателя или кнопки, подключенной к любому из его выводов, который может использоваться для приема входных сигналов. Резистор с сопротивлением 10 кОм должен применяться для согласования сигналов на выводе, когда контакты переключателя или кнопки размыкаются. В противном случае вы можете получить непредсказуемые результаты
• Если между логическими выводами 1, 2 или 4 микроконтроллера PICAXE 08M и отрицательным выводом источника питания подключен переменный резистор, то микроконтроллер может измерять его и «решать», что делать. Это называется функцией «аналого-цифрового преобразования», которое рассмотрено в нашем следующем эксперименте.
Эксперимент 35. ПРОВЕРКА РЕАЛЬНОГО МИРА
Нам часто нужно, чтобы микроконтроллер измерял что-нибудь и отображал это соответствующим способом. Например, он может измерять низкую температуру и подавать сигнал тревоги, как я это предлагал в примере, который приводил ранее.
Микроконтроллер PICAXE имеет три аналого-цифровых преобразователя (АЦП), которые встроены и которые доступны через логические выводы 1, 2 и 4, как это показано на рис. 5.137–5.138.
Наилучший способ их использования — это подача напряжения величиной от 0 до 5 В. В данном эксперименте я покажу вам, как откалибровать зависимость выходного кода микроконтроллера от сопротивления.
Вам понадобятся:
1. Подстроечный потенциометр с сопротивлением 2 кОм. Количество — 1 шт.
2. Микроконтроллер PICAXE 08M, а так же соответствующие USB-кабель и разъем (гнездо). Количество — по 1 шт. каждой позиции.
Порядок действий
Возьмите такой же подстроечный потенциометр, который вы использовали в эксперименте 32, и подсоедините его центральный вывод к логическому выводу 2 (вывод 5 микросхемы) микроконтроллера PICAXE.
Другие два вывода подстроечного потенциометра с сопротивлением 2 кОм подключены соответственно к минусовому и плюсовому выводу источника питания. Таким образом, в зависимости от того, в каком положении находится подстроечный потенциометр, логический вывод микроконтроллера PICAXE напрямую подключен к плюсовому выводу источника (это один конец шкалы) или напрямую к плюсовому выводу (это другой конец шкалы) или может находиться в некотором промежуточном состоянии. Обратитесь к рис. 5.143, где приведена измененная схема, и к рис. 5.144 с фотографией собранной схемы, выполненной на макетной плате.
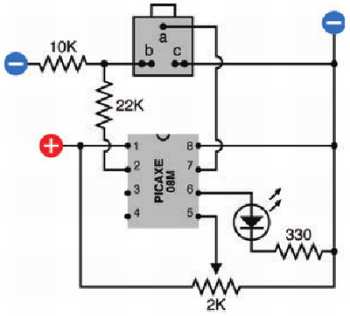
Рис. 5.143. Эта электрическая схема, которая приведена в виде, удобном для переноса ее на макетную плату, показывает, каким образом потенциометр с сопротивлением 2 кОм может быть использован для подачи изменяющегося напряжения на один из логических выводов микроконтроллера PICAXE, который в состоянии преобразовать аналоговый сигнал в цифровую форму
Рис. 5.144. Подстроечный потенциометр добавлен к ранее выполненной макетной плате
Теперь нам понадобится программа, которая укажет микроконтроллеру, что надо делать. Используем редактор Programming Editor, чтобы создать новый документ. Программный код должен выглядеть примерно следующим образом:
main:
readadc 2,b0
debug b0
goto main
Команда readadc 2,b0 означает «прочитать (read) аналоговое входное значение с логического вывода 2, чтобы с помощью АЦП (ADC) преобразовать аналоговый сигнал в цифровую форму и сохранить результат в переменной b0.
Команда debug b0 указывает микроконтроллеру перейти в режим отладки программы, в котором используется USB-кабель,
чтобы во время выполнения программы сообщить редактору Programming Editor значения всех переменных. При этом переменные будут отображаться в окне отладки.
Следует загрузить программу, и когда программа начнет выполняться, должно открыться окно отладки. Начните регулировку подстроечным потенциометром, отслеживая при этом значения переменной b0, и вы заметите, каким образом будет изменяться переменная b0.
Вы можете сделать таблицу и затем нарисовать график, который покажет зависимость между сопротивлением потенциометра, измеренным между логическим выводом 2 (вывод 5 микросхемы) и «землей» (минусовой вывод источника питания), и цифровым значением в ячейке b0. После этого нужно отсоединить подстроечный потенциометр от макетной платы и измерить его сопротивление мультиметром, чтобы увеличить его сопротивление на определенную величину, например, на 200 Ом, а затем вернуть его на макетную плату, а снова проверить значение переменной b0.
Это достаточно трудоемкое занятие, но выполнение калибровки всегда утомительная работа, которую я в любом случае решил для вас выполнить. График зависимости показан на рис. 5.145.
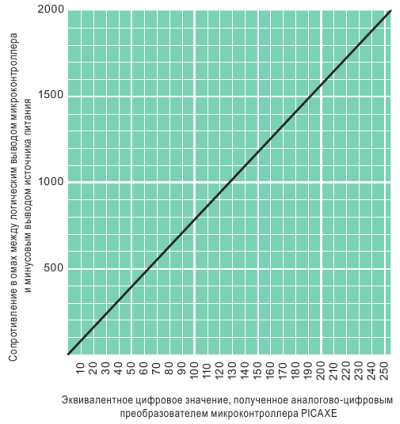
Рис. 5.145. Когда вход АЦП микроконтроллера подключен к потенциометру с сопротивлением 2 кОм, соединенному с тем же самым источником питания микроконтроллера, вы должны обнаружить, что различные значения сопротивления между входным логическим выводом контроллера и минусовым выводом источника питания генерируют соответствующие выходные цифровые значения, показанные на графике. Следует заметить, что потенциометр должен иметь общее сопротивление 2 кОм, а источник питания точно поддерживать напряжение, равное 5 В
Вы также можете просмотреть исходные данные в табл. 5.3. Мне было очень приятно обнаружить, что микроконтроллер PICAXE обладает очень точной линейной характеристикой. Другими словами, график представляет собой идеальную прямую линию.
Эта таблица (см. табл. 5.3) показывает измерения, которые были сделаны контроллером PICAXE 08M.
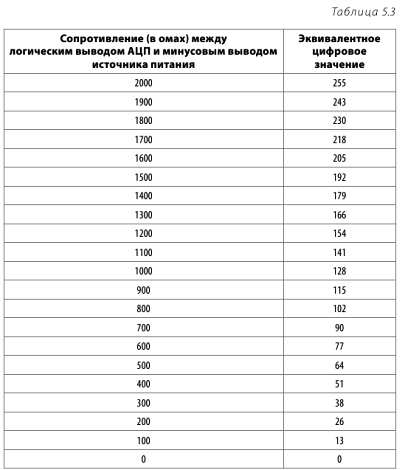
Теперь мы можем модифицировать программу таким образом, чтобы заставить ее делать что-то с информацией, которая ей передается:
main:
readadc 2,b0
let w1 = 5 * b0
high 1
pause w1
low 1
pause w1
goto main
Посмотрим, что здесь должно выполняться. Прежде всего мы берем значение из переменной b0, и в следующей строке мы выполняем с этим значением некоторую арифметическую операцию. Звездочка означает «умножить». Поэтому эта инструкция звучит так: «Взять то значение, которое хранится в ячейке b0, умножить его на 5 и результат сохранить в переменной w1». Мы должны использовать двухбайтовую переменную w1, поскольку, когда мы умножаем значения переменной b0 на 5, мы можем получить число, которое будет больше 255, что слишком велико, чтобы его можно было бы использовать в качестве байтовой переменной.
Наконец, мы берем значение переменной w1 и используем его в качестве параметра для команды pause (пауза) вместо предыдущего фиксированного значения. Мы указываем микроконтроллеру PICAXE: «сделай паузу такой длительности, сколько микросекунд задано значением переменной w1». Поэтому программа проверяет переменное сопротивление, превращает это значение в целое число и использует это число для регулировки частоты мигания светодиода.
Вспомните тележку, приводами которой служат шаговые электродвигатели. Для нее предполагается проверить состояние двух фоторезисторов, а затем соответствующим образом отрегулировать скорость вращения каждого двигателя. Отлично, эта программа для микроконтроллера PICAXE является шагом в нужном направлении. С ее помощью можно измерить напряжение на выводе и изменить выходную частоту другого вывода. Если же у вас есть два микроконтроллера PICAXE, то вы каждый из них можете подключить к своему фоторезистору и шаговому двигателю. Затем вы должны настроить поведение вашей тележки, отредактировав вторую строку в программе, в которой значение переменной b0 будет преобразовано в значение переменной w1, используемой в качестве параметра команды pause (пауза) для определения числа импульсов в секунду. Вместо умножения на 5 вы должны задать умножение на 7 или на любое другое число, чтобы получить тот результат, который нужен. Это подводит нас к важному выводу: большое преимущество программируемой микросхемы заключается именно в том, что вы можете выполнить все нужные настройки с помощью программного обеспечения.
Поскольку микроконтроллер PICAXE 08M на самом деле имеет более одного входа АЦП и три вывода, которые могут быть использованы для выхода, поэтому вы можете подумать, а возможно ли использовать одну микросхему для управления обоими двигателями в зависимости от входных значений, полученных от двух датчиков. Проблема заключается в том, что три выходных вывода микроконтроллера PICAXE 08M также функционируют как три выходных вывода АЦП. Поэтому в данном случае вам лучше купить один более сложный микроконтроллер, например, PICAXE 18M, который имеет больше выводов, назначение которых можно выбирать. Кроме того, эта микросхема использует тот же самый базовый набор программных инструкций и стоит практически столько же.
Прочитав документацию PICAXE, вы можете найти в ней описание команды pwmout, которая представляет собой сокращение следующей фразы «pulse-width modulation output» (выход широтно-импульсной модуляции), но точнее вы должны ее расшифровывать, как «power motor output» (выход питания двигателя). Эта команда специально предназначена для управления шаговыми двигателями. Она задает выходную частоту импульсов, которые будут продолжать выдаваться до тех пор, пока микроконтроллер выполняет другие инструкции в своих программах.
Дополнительные функции
Полное руководство по микроконтроллеру PICAXE 08M может занять целую книгу и, конечно, такие книги уже существуют (для это достаточно выполнить поиск книг в интернет-магазине Amazon.com с ключевым словом «picaxe»). Но я закончу свое введение в микроконтроллеры только лишь перечислением некоторых дополнительных возможностей, использование которых я оставляю на ваше самостоятельное рассмотрение. После я собираюсь предложить вам еще один последний эксперимент.
Прерывания
Микроконтроллер PICAXE 08M позволяет вам установить одно «прерывание». Эта функция при достижении определенного события указывает микросхеме выполнить заранее обусловленный перечень действий — например, когда на одном выводе задать определенное напряжение, то микроконтроллер должен остановить выполнение любой выполняемой инструкции, а затем соответствующим образом отреагировать на это прерывание.
Инфракрасная система
Один вывод микроконтроллера PICAXE 08M может быть использован для приема инфракрасных сигналов от пульта дистанционного управления по типу телевизионного. Вы можете купить эти устройства у тех же поставщиков, которые продают сами микросхемы PICAXE. При наличии инфракрасного датчика, присоединенного к микроконтроллеру, вы можете подавать команды дистанционно. Если у вас появится желание построить дистанционно-управляемого робота, то надо учитывать, что микроконтроллер разработан специально с учетом этой идеи.
Серводвигатели
Каждый микроконтроллер PICAXE имеет, по меньшей мере, один вывод, который может посылать поток импульсов для управления типичным серводвигателем. В микросхеме микроконтроллера PICAXE 08M это логический вывод 2 (вывод 5 микросхемы). Длительность каждого импульса указывает двигателю насколько ему повернуться от центрального его положения до остановки. Такой поток импульсов может быть сгенерирован таймером 555, но с помощью микроконтроллера PICAXE это сделать легче. Для получения дополнительной информации о серводвигателях, которые особенно полезны в таких приложениях, как рулевое управление в моделях автомобилей, управление закрылками на моделях аэропланов, и движение роботов, вы можете обратиться к Интернету.
Музыка
Микроконтроллер PICAXE имеет встроенный генератор звука, который может быть запрограммирован командой tune (звук) для воспроизведения мелодий, записанных с помощью достаточно простого кода.
Алфавитно-цифровой вход/выход
Команда kbin выполняется микроконтроллерами PICAXE моделей 20X2, 28X1 и 28X2 и 40X1 и 40X2. Вы можете подключить к микроконтроллеру стандартную клавиатуру компьютера, а затем считывать нажатия клавиш. Вы можете также присоединить алфавитно-цифровые дисплеи, но эти процедуры не являются очевидными. Например, когда вы попытаетесь определить, какую клавишу кто-то нажал на клавиатуре, ваша программа должна содержать список специальных шестнадцатеричных кодов, которые создает каждая клавиша клавиатуры.
Псевдослучайное генерирование чисел
Все модели микроконтроллеров PICAXE могут генерировать псевдослучайные числа, используя встроенный алгоритм. Если вы будете запускать генератор чисел, запрашивая пользователя нажать на клавишу, и после этого измерять время отклика, то вы можете связать генератор с расчетом периода времени, и генератор при этом будет выдавать последовательность псевдослучайных чисел с меньшей вероятностью повторения.
Чтобы узнать больше о дополнительных функциях, обратитесь к документу по адресу http://www.reved.co.uk/docs/picaxe_manual1.pdf.
Эксперимент 36. КОДОВЫЙ ЗАМОК, ПОВТОРНОЕ ОБРАЩЕНИЕ
Кодовый замок, который я описывал в эксперименте 20, особенно легко реализуется с использованием микроконтроллера, потому что для кодового замка требуется выполнение серии операций, которые похожи на компьютерную программу. Я собираюсь показать, каким образом этот проект может быть модернизирован с использованием микроконтроллера PICAXE 08M, а затем предоставить вам некоторые идеи о том, каким образом могут быть изменены некоторые другие проекты в этой книге.
Вам понадобятся:
1. Тот же самый тип клавиатуры и реле, которые были рекомендованы для эксперимента 20.
2. Транзисторный усилитель для того, чтобы усиливать выходной сигнал микроконтроллера PICAXE для включения реле.
Получение входного сигнала от пользователя
Любые входные выводы микроконтроллера PICAXE могут регистрировать замыкание контактов переключателя. Проблема заключается в том, что в данном микроконтроллере имеется только три вывода, которые способны выполнять это, и даже наиболее продвинутый микроконтроллер серии PICAXE имеет менее 10 таких выводов. Поэтому естественно возникает вопрос — каким же образом мы можем присоединить десятикнопочную клавиатуру к микроконтроллеру PICAXE 08M?
У меня есть одно предложение: можно к клавиатуре подключить различные резисторы таким образом, чтобы каждая кнопка клавиатуры выдавала различное напряжение на один из входов АЦП. Затем следует использовать АЦП для того, чтобы преобразовывать это напряжение в соответствующее цифровое значение, сопоставив которое со специальной таблицей, можно определить какая именно кнопка была нажата. Такое решение проблемы может показаться не слишком элегантным, но надо заметить, что оно работает!
Клавиатура может быть подключена так, как это показано на рис. 5.146.
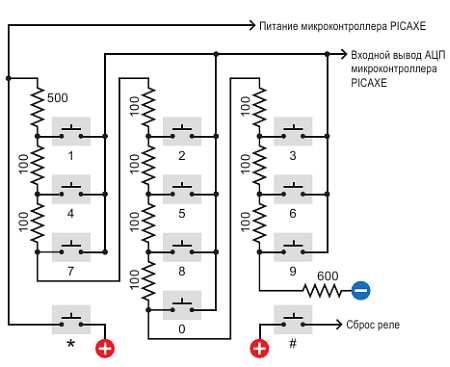
Рис. 5.146. Это быстрый и простой способ подключения цифровой клавиатуры для того, чтобы обеспечить цифровой ввод информации в микроконтроллер PICAXE, использующий последовательное соединение резисторов с суммарным сопротивлением, равным 2000 Ом. Когда нажата какая-либо цифровая кнопка клавиатуры, это приводит к подключению входного вывода АЦП микроконтроллера к определенному напряжению, заданному цепочкой резисторов. Определив с помощью АЦП это напряжение, можно в конечном итоге определить, какая же кнопка была нажата
Кнопка с символом «*» по-прежнему будет использоваться для включения напряжения питания точно также как и в исходном эксперименте, а кнопка «#», как и ранее, будет осуществлять сброс реле в конце для перевода схемы в исходное состояние.
Ток протекает через последовательную цепочку резисторов, начиная с первого резистора, который имеет сопротивление 500 Ом. Поскольку это нестандартное значение сопротивления, вы либо должны набрать его с помощью комбинации последовательно установленных резисторов, либо получить с помощью подстроечного потенциометра. После этого резистора каждая кнопка цифровой клавиатуры будет отделена от следующей кнопки резистором с сопротивлением 100 Ом. Наконец в конце цепи установлен резистор с сопротивлением 600 Ом, который подключен к минусовому выводу источника питания. Хочу снова обратить ваше внимание, что это так же нестандартное значение и вам, может быть, придется использовать подстроечный потенциометр.
Просуммируйте все сопротивления и вы получите 2 кОм, что соответствует значению, которое требуется для использования микроконтроллера PICAXE. Когда вы нажмете какую-либо кнопку, вы выполните определенный отвод от последовательной цепочки резисторов. Так, между выводом АЦП контроллера PICAXE и «землей» при нажатой кнопке «9» будет сопротивление 600 Ом. При нажатой кнопке «6» сопротивление будет 700 Ом, кнопке «3» — 800 Ом и т. д. (Вы, конечно, можете предпочесть подключить кнопки таким образом, чтобы сопротивление увеличивалось в более логичной последовательности. Это на ваше усмотрение. Я выбрал такую схему соединения только с учетом того, чтобы их было легче подключать.)
Теперь посмотрим на значения АЦП, которые я привел в табл. 5.4. Здесь показаны значения АЦП, которые я получил, когда нажимал на различные кнопки цифровой клавиатуры — но вы не можете рассчитать их абсолютно точно, поскольку они могут слегка разниться, если значения резисторов не слишком точны, или если напряжение питания несколько отличается от 5 В. Не слишком хорошо, например, утверждать, что микроконтроллер PICAXE будет выполнять АЦП преобразование с результатом 77, когда сопротивление между его входом и «землей» будет равно 600 Ом.
Точнее утверждать, что это значение будет в диапазоне между 71 и 83. Если же мы зададим такой диапазон значений, как это показано в табл. 5.4, то мы получим значительно лучший шанс правильного интерпретирования каждой кнопки.
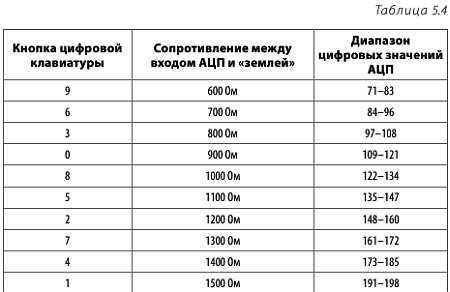
Предположим, что выход цифровой клавиатуры мы подключим к логическому выводу 2 АЦП микроконтроллера PICAXE (выводу 5 микросхемы). Вы можете теперь использовать программу редактирования Programming Editor для того, чтобы записать программу, которая должна выглядеть следующим образом:
getkey:
readadc 2,b0
let b1 = 9
if b0 < 84 then fnish
let b1 = 6
if b0 < 97 then fnish
let b1 = 3
if b0 < 109 then fnish
let b1 = 0
if b0 < 122 then fnish
let b1 = 8
if b0 < 135 then fnish
let b1 = 5
if b0 < 148 then fnish
let b1 = 2
if b0 < 161 then fnish
let b1 = 7
if b0 < 173 then fnish
let b1 = 4
if b0 < 186 then fnish
let b1 = 2
fnish:
return
Что означает команда return в конце программы? Я расскажу об этом чуть позже. А пока хочу объяснить основной текст программы.
В переменной b0 сохраняется значение аналого-цифрового преобразователя, когда он получает сигналы от клавиатуры. После сохранения некоторого числового значения в переменной b0 программа должна рассчитать, какой же кнопке клавиатуры соответствует это значение. Определенный номер кнопки (от 0 до 9) будет сохранен в другой переменной b1.
Программа начинается с того, что число 9 присваивается переменной b1. Затем она проверяет условие b0 < 84, которое означает «если b0 меньше 84». Если это так, то программа указывает микроконтроллеру PICAXE then fnish, что означает «тогда перейти на метку finish». Если же переменная b0 не меньше 84, по умолчанию микроконтроллер PICAXE продолжает выполнять программу со следующей строки, в которой делается вторая попытка определить, какая кнопка была нажата. В этой строке переменной b1 присваивается число 6. Теперь выполняется другая проверка условия оператором if-then (если — тогда) и т. д. Этот процесс изменения значений в b1 останавливается только тогда, когда оно попадает в точку, где b0 больше, чем число в таблице.
Если вы знакомы с другими языками BASIC, то это может показаться вам несколько утомительным. Вы можете удивиться, почему же мы не можем использовать программную строку, например, такого типа:
if b0 > 70 and b0 < 84 then b1 = 9
Ответ заключается в следующем: используемый язык PICAXE BASIC не имеет таких достаточно сложных конструкций. Оператор if- then (если — тогда) в результате должен привести к переходу в другую часть программы. Это единственный допустимый результат.
Если же у вас нет предшествующего опыта программирования, то приведенная программа может показаться слишком сложной и, возможно, достаточно сильно вас озадачит. Это и понятно, поскольку вы проходите только ускоренный, ознакомительный курс в написании программ без какой-либо официальной подготовки. Все же редактор Programming Editor может оказать существенную помощь, потому что у него есть функция имитации. Однако, перед тем как вы будете ее использовать, вы должны перед программой, только что приведенной мной, предварительно вставить управляющую программу, которую нужно ввести с помощью клавиатуры. Копия экрана, приведенная на рис. 5.147, показывает, как это должно выглядеть.
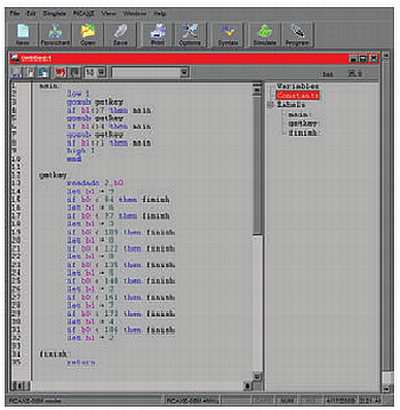
Рис. 5.147. На этой копии экрана показан законченный вариант текста программы для считывания последовательного нажатия трех кнопок цифровой клавиатуры в соответствии с кодом кодового замка. Если последовательность ввода верна, то микроконтроллер PICAXE с одного из его выводов отправляет выходной сигнал высокого логического уровня. Если последовательность ошибочна, то программа возвращается к повторному выполнению цикла сначала
Я для нашего кодового замка выбрал произвольную кодовую комбинацию 7–4–1. При использовании этих чисел основная часть программы будет выглядеть следующим образом:
main:
low 1
gosub getkey
if b1<>7 then main
gosub getkey
if b1<>4 then main
gosub getkey
if b1<>1 then main
high 1
end
Я должен пояснить, что пара символов «<>» в операторах условия означает «не равно». Поэтому четвертая строка программы означает «если переменная b1 не равна 7, то начать программу с начала».
Предполагается, что значение переменной b1 должно быть равно 7, если пользователь ввел правильную комбинацию. Поэтому, если переменная не равна 7, то считается, что пользователь ввел неправильное значение, и оператор if-then (если — тогда) возвращает микроконтроллер PICAXE обратно в начало программы. Практически каждый раз, когда пользователь вводит число, которое не соответствует правильной последовательности 7–4–1, программа отправляет чип PICAXE обратно в начало программы. Это именно тот алгоритм, который выполняют несложные аппаратные средства в данном эксперименте.
Но, что означает это слово «gosub»? Оно означает «перейти к подпрограмме» (go to a subroutine). Подпрограмма это любая последовательность операторов, которая заканчивается оператором return. Поэтому строка gosub getkey (перейти к подпрограмме getkey) указывает микроконтроллеру PICAXE запомнить текущее состояние в программе и перейти к выполнению подпрограммы определения нажатой клавиши, и выполнять ее до тех пор, пока микроконтроллер не встретит оператор return, после чего возвратиться к месту вызова подпрограммы.
Микроконтроллер PICAXE продолжает выполнять аналогичные операции, пока он не достигнет слова «end» (конец). В конце основной части программы я должен обязательно ввести слово «end», потому что в противном случае микроконтроллер PICAXE будет продолжать выполнение программы и снова перейдет к выполнению подпрограммы. Команда end останавливает выполнение программы, которую исполняет микроконтроллер. На рис. 5.147 показана экранная копия окончательного варианта текста программы.
Итак, это все? Да, это все. Если вы ввели программный код в редакторе Programming Editor точно в приведенном мною виде, то вы можете запустить его в режиме имитации и в открытом окне Simulation надо будет щелкнуть правой кнопкой около логического вывода А2, чтобы пошагово увеличить его значение. Каждый раз, когда вы будете продвигаться от строки к строке при выполнении подпрограммы getkey, вы можете увидеть на экране, каким образом при этом меняется значение переменной b1.
Это действительно все, что нужно для выполнения функций кодового замка. Когда микроконтроллер PICAXE выполняет эту программу, он ожидает правильного ввода кода. Если он получает правильный код, то на логическом выводе 1 формируется сигнал высокого логического уровня; в противном случае на этом выводе остается низкий уровень.
Единственный дополнительный элемент, который вам понадобится — это транзистор или КМОП логический элемент между логическим выводом 1 и реле, которое выполняет разблокирование компьютера, поскольку сам микроконтроллер PICAXE не может обеспечить достаточную величину выходного тока для управления реле.
Ввод этой программы в чип микроконтроллера не только упрощает схему, но также предоставляет некоторые другие преимущества. Вы можете изменить секретную кодовую комбинацию простым переписыванием программы и загрузкой ее новой версии в память микроконтроллера.
Недостатки микроконтроллеров
Несмотря на все достоинства, микроконтроллер PICAXE имеет и недостатки. Только одно его требование к напряжению питания ограничивает его использование с той же степенью свободы, что и таймер 555.
Кроме того, аналогичного результата я мог бы добиться и за счет установки на макетную плату только таймера 555 и добавления пары резисторов и пары конденсаторов, а вот применение микроконтроллера PICAXE потребует от меня добавления разъема для загрузки программы и подключения его к компьютеру, написания программы в программном редакторе Programming Editor и загрузки ее в микроконтроллер.
Некоторым людям не нравится писать программы или у них есть трудности в напряженном использовании левого полушария мозга, чего, разумеется, требует компьютерное программирование. Они, конечно же, предпочтут собирать только аппаратные средства.
Другие люди могут обладать иными предпочтениями. Это, конечно же, дело вкуса, но имеется одна хорошо нам известная и существенная проблема программирования — это то, что компьютерные программы часто содержат ошибки, которые могут проявиться неделями или даже месяцами позже.
Микроконтроллер PICAXE, например, не защитит вас, если переменной будет присвоено значение, которое превысит предельное значение для данного типа переменной. Предположим, что b1 = 200 и b2 = 60 и в вашей программе для микроконтроллера PICAXE имеется следующая строка:
let b3 = b1 + b2
Результат должен быть равен 260, но байтовые переменные могут использовать числа только до 255. Что же произойдет? Вы обнаружите, что переменная b3 получила значение 4 без каких-либо предупреждений или объяснений. Эта ситуация известна, как ошибка переполнения, которую иногда предсказать очень трудно, поэтому это может случиться во время выполнения программы, когда внешние факторы находятся под полным контролем. Код выглядит вполне хорошо; программа Programming Editor не обнаруживает какой-либо синтаксической ошибки; работа в режиме имитации проходит без проблем. Но в реальном мире днями или даже месяцами позднее может внезапно возникнуть набор обстоятельств, приводящий к входному сигналу, который станет причиной переполнения; кроме того, программа в данный момент будет находиться внутри микросхемы и вам придется пережить неприятные минуты, определяя что же пошло не так.
В этом смысле программное обеспечение имеет свои проблемы, а аппаратное обеспечение имеет свои преимущества.
Неисследованная область
Если вы найдете время самостоятельно завершить большинство проектов, приведенных в данной книге, то вы очень быстро приобретете основы для продвижения в большинство фундаментальных областей электроники.
Что же такое вы пропустили на этом пути? Далее приведены несколько тем, которые остаются полностью открытыми и ожидают вас для исследования. Естественно, если они вас интересуют, вы должны поискать о них в Интернете.
Неформальный подход «изучай, совершая открытия», который я использовал в этой книге, предназначен для того, чтобы пролить свет на теоретические основы. По большей части я старался избегать использования математики, в противном случае это заставило бы вас погрузиться в более сложный курс по предмету. Если же у вас есть математические наклонности, то вы можете использовать их для более глубокого продвижения в понимании того, каким образом работают схемы.
Кроме того, я не слишком много уделил внимания компьютерной архитектуре. Мы не продвинулись слишком далеко в изучении двоичного кода, и вы не построили полусумматора, который является мощным элементом в изучении того, как функционируют компьютеры на самом фундаментальном уровне. Возможно, вам есть смысл ознакомиться с ассемблированием.
Я избегал глубокого проникновения в волнующий и загадочный мир переменного тока. Здесь также требуется привлечение некоторого объема математических формул, но даже поведение тока на высоких частотах сама по себе очень интересная тема.
По причинам, которые я уже указывал, я избегал использования компонентов для поверхностного монтажа — но вы можете сами обратиться к этой области при наличии относительно небольших средств, и если вас увлекла идея создания экстремально компактных устройств. Эта область занятий может стать будущим любительской электроники, поэтому, если вы к этому обратитесь, то, возможно, окажетесь на вершине достижений поверхностного монтажа.
Электронные лампы в этой книге не упоминались вообще, потому что на данный момент они представляют в основном исторический интерес. Но в этом разделе электроники присутствует какая-то специальная красота, особенно, если вы оформите схему с лампами в оригинальном корпусе. В руках мастера на все руки ламповые усилители и радиоприемники становятся предметами искусства.
Я не показал вам, как выполнять травление печатных плат.
Это задача, которая встречается достаточно часто, и подготовка к этому требует изготовления очень точных чертежей и использования компьютерных программ. Если случилось так, что у вас есть такие возможности, то у вас может возникнуть желание выполнять работы по травлению печатных плат самостоятельно. Это может быть самый первый ваш шаг к массовому производству собственных устройств.
Кроме того, в этой книге я совершенно не осветил проблемы статического электричества. Высоковольтное искрение не имеет какого-либо практического применения, и оно относится в основном к некоторым аспектам безопасности, но эта область обладает чрезвычайной притягательностью, и вы можете найти необходимую информацию по изготовлению оборудования такого рода. Возможно, всем этим вам следует попробовать заняться.
Другие микроконтроллеры
Если вам захочется обратиться к устройствам, обладающим большей вычислительной мощностью, то микроконтроллерные модули BASIC Stamp являются следующим логическим шагом после PICAXE. Название BASIC Stamp связано с тем, что изначально эти микроконтроллеры выглядели как почтовые марки[15].
Серия BASIC Stamp имеет большой набор команд и большое количество разнообразных вспомогательных устройств (включая дисплеи с графическими возможностями и небольшими клавиатурами, которые специально спроектированы для использования с контроллером). Микроконтроллер BASIC Stamp показан на рис. 5.148.
Рис. 5.148. Микроконтроллерный модуль BASIC Stamp состоит из компонентов для поверхностного монтажа, размещенных на печатной плате со штыревыми выводами, которые имеют интервал 0,1'' (2,54 мм) и предназначены для установки на макетную плату или перфорированную печатную плату. Этот компонент использует версию языка BASIC, которая аналогична языку программирования для микроконтроллеров PICAXE, но гораздо более обширна. Микроконтроллер BASIC Stamp можно использовать совместно с большим количеством периферийных устройств, включая многочисленные буквенно-цифровые точечные матричные дисплеи
С другой стороны, все, что связано с микроконтроллерами BASIC Stamp, вы найдете несколько более дорогим, чем для микроконтроллеров PICAXE; кроме того, процедура загрузки программ в них не слишком-то проста.
Одна из самых последних разработок в мире микроконтроллеров это модули Arduino, которые являются более сложными и мощными. Их использование требует программирования на языке С. Этот язык несколько более сложен для понимания и имеет весьма неявное сходство с синтаксисом, который применяется в микроконтроллерах PICAXE и модулях BASIC Stamp.
С другой стороны, поскольку язык С доминирует в мире больших компьютеров, его изучение может оказаться не слишком плохой идеей — и Arduino предлагает некоторые действительно потрясающие возможности. Из-за того, что модули Arduino настолько популярны, существует очень много программных средств, документации, форумов пользователей и много других энтузиастов-любителей электроники, которые будут вам полезны. Две другие книги из серии «Make», заглавия которых я упоминал ранее, в начале этой главы, — это «Getting Started with Arduino» (Введение в Arduino) и «Making Things Talk» (Заставь вещи говорить), представляют собой отличное введение в этот предмет.
В заключение
Я считаю, что истинная задача этой книги — введение в электронику — предоставить вам возможность почувствовать вкус к широкому полю деятельности, оставляя за вами направление, в котором вы захотите развиваться дальше. Электроника — это идеальное поле деятельности для тех, кто любит делать вещи самостоятельно, потому что почти любое приложение — от робототехники до радиоуправляемых моделей, телекоммуникаций, компьютерного оборудования и многого другого — предлагает возможности, которые мы можем применить в домашних условиях при использовании весьма ограниченных ресурсов.
По мере выполнения более глубоких исследований в областях электроники, которые вам покажутся наиболее интересными, я убежден, что вы получите удовлетворение от приобретения опыта в процессе обучения. Но больше всего я надеюсь, что вы получите истинное наслаждение на каждом этапе вашего пути.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК