Подводные роботы
Подводные роботы
Телеуправляемая система «Соларис» (рис. 10), построенная ВМС США, рассчитана на глубину погружения до 600 м.
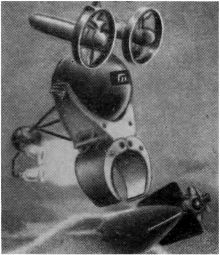
Рис. 10. Система «Соларис».
При помощи этой системы производят поиск и подъем затонувших торпед, ракетных двигателей и головок, а также выполняют некоторые подводные работы, и в частности прокладывают подводные кабели, поднимают со дна моря предметы весом до 3,4 т, осматривают подводную часть кораблей.
Эта система может использоваться также для обнаружения затонувших подводных лодок.
В комплект системы «Соларис» входят три основных устройства: исполнительный орган, кабель для подачи питания и управления и пульт управления.
Исполнительный орган представляет собой прочную сферу диаметром около 1 м и толщиной 12 мм, изготовленную из сплавов алюминия (рис. 11).
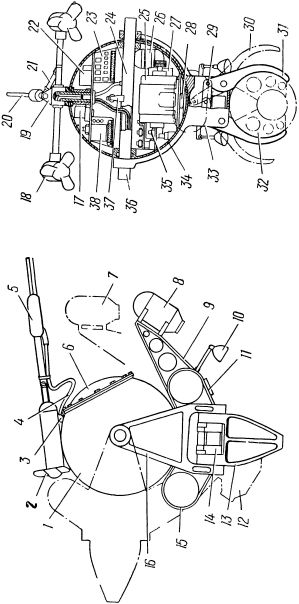
Рис. 11. Устройство системы «Соларис»: 1 — сфера; 2 — винт; 3 — сальник кабеля; 4 — кабель; 5 — соединительная муфта; 6 — люк; 7 — телевизионная камера в вертикальном положении; 8 — телевизионная камера; 9 — кронштейн; 10 — прожектор; 11 — излучатель гидролокатора; 12 — телевизионная камера в приподнятом положении; 13 — захват; 14 — привод захвата; 15 — цистерна плавучести; 16 — рама; 17 — привод сферы; 18 — обтекатель двигателя; 19 — подъемный рым; 20 — рабочий трос; 21 — привод поворотного устройства; 22 — источник питания; 23 — щиток привода управления; 24 — вал рамы; 25 — двигатель насоса; 26 — аккумулятор гидравлический; 27 — насос; 28 — прибор, сигнализирующий о появлении течи; 29 — коленчато-рычажное соединение; 30 — открытое положение захвата; 31 — закрытое положение захвата; 32 — поднимаемый предмет; 33 — блок захвата; 34 — перепускной клапан; 35 — сервоклапаны; 36 — цапфа для погрузки на корабль; 37 — привод рамы; 38 — гидролокатор.
На сфере и внутри нее установлены различное оборудование, механизмы и устройства. В верхней части сферы имеется люк для доступа к оборудованию, а в нижней смонтировано несколько приспособлений для выполнения подводных работ, главным из которых является рычажный захват для подъема цилиндрических предметов. Другие приспособления служат для прокладки кабеля, установки предметов и подрывных зарядов.
В качестве движителей камеры используются два винта, способные поворачиваться в вертикальной плоскости независимо друг от друга и обеспечивающие разворот сферы и ее движение со cкоростью 1,7 уз.
Рычажный захват и привод разворота вала винтов работают от системы гидравлики, имеющей насос с электроприводом. Мощность электродвигателя 15 л. с., производительность насоса 3,64 л/мин при давлении 204 кг/см2. От системы гидравлики работают также поворотные механизмы рамы и телевизионной камеры.
В сфере установлены гидролокатор для измерения глубины и обнаружения предметов и прибор, дающий условный сигнал на поверхность при нарушении герметичности камеры.
Исполнительный орган снабжен телевизионной установкой, закрепленной на перемещающемся кронштейне. Четыре лампы мощностью по 500 вт обеспечивают дальность видимости предметов под водой до 7,5 м.
Сфера спускается с надводного корабля на стальном тросе диаметром 12,5 мм. Для передачи сигналов от телевизионной камеры, подачи электроэнергии, исполнительных команд и сигналов контроля служит специальный кабель.
Пульт управления, размещаемый на надводном корабле, контролирует курс и глубину погружения исполнительного органа, расстояние от дна, азимут плоскости захватов, угол их наклона, обороты винтов. На пульте имеется экран телевизора.
Кабель и трос намотаны на две лебедки, действующие синхронно. Оператор, работающий на пульте управления, получает данные о скорости вращения лебедки, длине вытравленного троса, температуре, напряжении и силе тока электрогенератора, подающего электроэнергию к исполнительному органу.
Самоходная установка РУМ (подводный дистанционно-управляемый манипулятор) для производства глубоководных исследований, построенная в США, рассчитана на глубину погружения до 600 м (рис. 12).

Рис. 12. Самоходная установка РУМ.
Эта установка может нести полезную нагрузку весом до 450 кг, а без манипулятора и до 900 кг, перемещаться по грунту со скоростью 3 уз, взбираться на возвышенности, имеющие уклон до 30°, и преодолевать преграды высотой до 30 см.
Основой для корпуса и ходовой части установки РУМ послужил пехотный самоходный транспортер. Установка имеет манипулятор, четыре телевизионные камеры и гидролокатор.
Манипулятор изготовлен из легированной стали по типу манипуляторов, используемых в атомных лабораториях. Он копирует действия человеческой руки. Его «кисть» имеет два захвата, «запястье» может поворачиваться в любом направлении, «локоть» сгибаться, а «плечо» наклоняться и поворачиваться вокруг своей оси.
Стрела с гидравлическим приводом поддерживает манипулятор и дает ему возможность выдвигаться на длину 4,5 м, а также используется для подъема тяжелых предметов.
Телевизионная установка камеры имеет 4 объектива, два из которых направлены вперед, один — назад и один служит для контроля за движением манипулятора. Установка освещается ртутными лампами.
Управляется установка РУМ с берега по коаксиальному кабелю длиной 7600 м, по которому передаются 38 исполнительных команд и показаний приборов, сигналы от телевизионных камер и гидролокатора, а также электроэнергия для ламп освещения и главного электродвигателя.
Проектом предусмотрено иметь в комплекте РУМ подводный вертолет с подъемной силой 3630 кг при вертикальной скорости подъема 36,6 м/мин для преодоления непроходимых участков пути. Изменение угла поворота трех лопастей винта, скорости вращения и глубины погружения вертолета осуществляется по командам с берега.
По сообщению американской прессы, в лаборатории оружия ВМС США рассматривалось предложение промышленности о создании подводного робота, предназначенного для проведения поиска затонувших объектов в открытом море. Вес робота 500–700 кг, предполагаемая глубина погружения 600 м, размеры 1,5х1,5x3 м. Спуск робота предполагается осуществлять с надводного корабля. Управление передвижением камеры и производство работ по глубине должно производиться с поверхности по кабелю длиной 1200 м. В роботе проектируется разместить телевизионную установку, двигатель, приборы управления, манипуляторы и систему контроля. Манипуляторы робота должны весить около 45 кг; их рабочие органы, выдвинутые из корпуса на 0,6 м, будут находиться в пределах обзора телевизионной установки. Скорость движения робота в воде против течения 3 уз. Предполагается, что робот сможет управляться на глубине 300 м или на грунте С Точностью до ±7 см.
По мере изучения и освоения богатств Мирового океана будут создаваться все новые и новые подводные роботы, способные производить сложнейшие операции по заданной программе или при управлении с помощью кабеля. Но наряду с роботами будут необходимы и управляемые людьми камеры с манипуляторами, так как любая «умная» машина не сможет полностью заменить глаза и ум человека. Периодическое присутствие человека на дне моря потребуется для ремонта и наладки подводных роботов, контроля за ходом рабочего процесса и выполнения особо сложных работ. Человек должен опускаться на дно в камере, защищающей его от давления воды и позволяющей ему выполнять определенные операции под водой.
Вот как представляет инженер А. Н. Дмитриев будущую камеру, названную им батиандром, что означает глубинный человек (рис. 13).
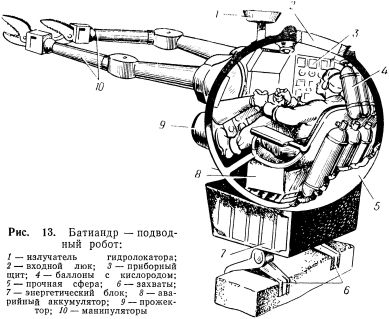
Рис. 13. Батиандр — подводный робот: 1 — излучатель гидролокатора; 2 — входной люк; 3 — приборный щит; 4 — баллоны с кислородом; 5 — прочная сфера; 6 — захваты; 7 — энергетический блок; 8 — аварийный аккумулятор; 9 — прожектор; 10 — манипуляторы.
По форме батиандр — сфера диаметром 1,5 м, имеющая люк и иллюминаторы для наблюдения. Батиандр, обладающий постоянной положительной плавучестью, по замыслу автора, сможет погружаться за счет принятия твердого балласта в клешнях. Кроме того, он снабжен гайдропом — тросом с грузом, обеспечивающим мягкую покладку камеры на грунт. В случае аварии оператор отдаст балласт, камера получит положительную плавучесть и быстро всплывет на поверхность. Перемещаться батиандр должен с помощью двух поворотных водометных движителей, которые обеспечат ему маневрирование во всех плоскостях.
Для производства работ предполагается иметь два манипулятора с гидравлическим приводом, подводный телевизор и гидролокатор. Внутри камеры должны постоянно поддерживаться благоприятные для человека условия. В качестве источника электроэнергии предполагается использовать аккумуляторную батарею большой емкости. Следует заметить, что создание подобной подводной камеры является осуществимой задачей.
Проблемы освоения глубин Мирового океана выдвигают требования о создании универсальных подводных роботов, способных добывать со дна моря полезные ископаемые и транспортировать их на сушу или поднимать на поверхность. Темпы изучения и освоения морских глубин в наши дни позволяют думать, что эта мечта осуществится в недалеком будущем.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Глава 4. Роботы на суше и на море
Глава 4. Роботы на суше и на море Помимо катеров ВУ Бекаури занимался и морскими минами и торпедами. Для этого в 1926 г. в «Остехбюро» был передан ленинградский завод «Торпедо».[8]Летом 1925 г. в Финском заливе с помощью радиоаппаратуры, установленной на тральщике «Микула»,
МИФЫ И РОБОТЫ
МИФЫ И РОБОТЫ Парадоксы языка типа антиномии «Лжец» часто обыгрывают фантасты. Перед роботом ставится скрытая логическая загадка, любое решение которой противоречит жестоким законам поведения роботов. В такой ситуации робот либо погибает, либо застывает в абсолютной
Роботы-пожарные
Роботы-пожарные Во многих домах имеются огнетушители, а как насчет робота-пожарного? Такой робот может обнаружить возгорание в любой части помещения, самостоятельно переместиться туда и загасить огонь.Идея робота-пожарного оказалась настолько популярной, что уже
Роботы в медицине
Роботы в медицине Роботов, используемых в медицине, можно отнести к трем категориям. Роботы первой категории используются в диагностике. Весной 1992 года компания Neuromedical Systems Inc. of Suffern, NY, выпустила на рынок изделие под названием Papnet. Система Papnet представляет собой
Военные роботы
Военные роботы Если государство оказывается вовлеченным в военный конфликт, то для достижения скорейшей победы при минимальных потерях использование роботов имеет исключительно важное значение, особенно в современных условиях. Например, использование беспилотной
Домашние роботы
Домашние роботы В домашнем хозяйстве роботы могут найти множество различных применений. С помощью роботов можно мыть окна и полы, делать мелкий домашний ремонт, чистить обивку мебели, стирать, готовить и выносить кошачьи экскременты. Здесь возникает интересный
Глава 11 Шагающие роботы
Глава 11 Шагающие роботы Шагающие роботы представляют собой класс роботов, имитирующих передвижение животных или насекомых. Как правило, для передвижения роботы используют механические ноги. Передвижение с помощью ног насчитывает миллионы лет истории. По контрасту,
Глава 13 Подводные роботы
Глава 13 Подводные роботы Робототехника подводных устройств развивается по многим направлениям. Большинство подводных роботов создаются для проведения спасательных операций и исследований. В будущем подводные роботы будут помогать осваивать океан для организации
Введение. Роботы – помощники человека
Введение. Роботы – помощники человека Как только не называют нынешнее столетие – «атомный век», «космический век», «век электроники». С не меньшим основанием можно назвать его веком роботов. Ещё совсем недавно эти устройства существовали лишь на страницах научно –
Роботы на укладке готовой продукции
Роботы на укладке готовой продукции На многих предприятиях готовая продукция сходит с конвейера упакованной в ящики массой до 20…30 кг. Рис. 6. Робот фирмы «Ретаб» для укладки ящиков.1) конвейер готовой продукции 2) робот укладки 3) платформа транспортировки готовой
Космические роботы
Космические роботы В 1822 году великий английский поэт Дж. Байрон писал в своей поэме «Дон Жуан»: «Уж скоро мы, природы властелины, и на Луну пошлём свои машины»… Гениальное пророчество Дж. Байрона сбылось уже во второй половине XX века. Мы являемся очевидцами невиданного
Роботы в сельском хозяйстве
Роботы в сельском хозяйстве Трудно представить, как, например, станет какой – то металлический шкаф «ухаживать» за живой коровой. Всё-таки ферма не цех, где роботу достаточно выполнять заданный набор механических движений. Тут будут рядом с ним беспокойные животные со
Роботы для Мегамира
Роботы для Мегамира Казалось бы, куда уж дальше, но есть совершенно безграничная область для фантазии роботостроителей – мегамир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли – Луну, фантасты устремились к звёздам. В одной нашей
Роботы – игрушки
Роботы – игрушки На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух электродвигателей с
Человекоподобные роботы
Человекоподобные роботы Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо – голубой
Промышленные роботы сегодня
Промышленные роботы сегодня Уже давно никто не вспоминает роботов, которых более 60 лет назад Карел Чапек сделал главными героями своей книги «Восстание роботов». Собранные из большого количества жести, заклепок, электрических лампочек, с голосом, как из бочки, а быть