Программа
Программа
Блок-схема программы изображена на рис. 8.17. После включения питания ходовой двигатель отключен, и микроконтроллер начинает искать наиболее яркий источник света, поворачивая сервомотор. Если источник света имеет слишком большую яркость, то включается режим избегания. В режиме избегания ходовой двигатель включается в режим реверса; при этом ведущее колесо поворачивает направо или налево. Если освещенность не достигает уровня режима избегания, то робот поворачивается в направлении источника света и движется вперед. При замыкании датчика столкновений робот предполагает наличие препятствия и переходит в режим избегания. При выключении датчика столкновения (препятствия нет) программа переходит на начало, и процесс поиска и движения к наиболее яркому источнику света продолжается.
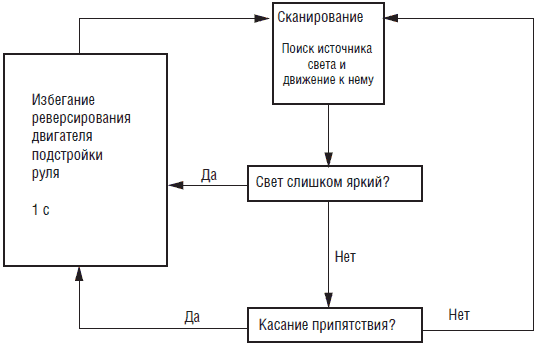
Рис. 8.17. Блок-схема программы
Программа написана для компилятора PICBASIC и введена непосредственно в PIC16F84. Без особых изменений программа может быть написана на версии PICBASIC Pro. Программа может быть подстроена под имеющиеся экземпляры CdS датчиков, используемых двигателей и т. п.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Глава 3. Программа
Глава 3. Программа Полное её название «Рабочая программа испытаний турбогенератора № 8 Чернобыльской АЭС в режимах совместного выбега с нагрузкой собственных нужд».Ничего выдающегося в Программе нет, обычная программа, нормально написанная. Известность она получила
Программа «HYWARDS»
Программа «HYWARDS» В поддержку проектов «РоБо» и «Брасс Белл» ВВС инициализировали программу исследований, названную «Программа изучения гиперзвукового оружия» — «Хьювардс» («HYWARDS»).Решаемые в ее рамках задачи были впервые сформулированы в требованиях к перспективному
Программа «Lunex»
Программа «Lunex» Серьезной альтернативой программе «Аполлон» могла стать секретная программа высадки на Луну, подготовленная командованием ВВС США и известная ныне под названием «Лунэкс» («Lunex» — от «Lunar Expedition»). Эта программа была представлена на рассмотрение
Программа «ASAT»
Программа «ASAT» В конечном итоге американские военные остановили свой выбор на системе «АСАТ» («ASAT» — сокращение от «Air-Launched Anti-Satellite Missile»), предусматривающей размещение антиспутниковых ракет на боевых самолетах.Авиационный ракетный комплекс перехвата «АСАТ»
Программа «Холод»
Программа «Холод» Выше я уже упоминал, что с 1993 по 1996 год по заказу Российского космического агентства в рамках поддержанной государством научно-исследовательской и экспериментальной программы «Орел» проводились исследования тенденций развития и возможностей
Программа «СОИ»
Программа «СОИ» Как очень быстро выяснилось, ассигнования на «СОИ», предусмотренные бюджетом, не могли обеспечить успешного решения грандиозных задач, поставленных перед программой. Не случайно многие эксперты оценивали реальные расходы на программу в течение всего
Программа «Фон»
Программа «Фон» В начале 70-х годов в СССР были проведены научно-исследовательские и опытно-конструкторские работы по программе «Фон» с целью создания перспективной системы ПРО. Суть программы состояла в создании системы, которая позволила бы держать «на прицеле» все
Программа
Программа Блок-схема программы изображена на рис. 8.17. После включения питания ходовой двигатель отключен, и микроконтроллер начинает искать наиболее яркий источник света, поворачивая сервомотор. Если источник света имеет слишком большую яркость, то включается режим
Программа 1
Программа 1 ‘Микроконтроллер 1start:High 4: low 4 ‘Мигание светодиодаb7 = 0button 5,0,255,0,b7,1,avoid ‘Проверка препятствияpot 7, 255, b0 ‘Считывание датчика CdS 1pot 6, 255, b1 ‘Считывание датчика CdS 2if b0 <= 250 then skip ‘Достаточно темно?If b1 >= 250 then slp ‘Даskip: ‘Нетif bo > 25 then skip 2 ‘Слишком много светаif b1 < 25
Программа 2
Программа 2 ‘Микроконтроллер 2b4 = 150 ‘Установка среднего положения сервомотораstart:peek 6, b1 ‘Чтение данных микроконтроллера 1let b0 = b1 & 7 ‘Маскирование кроме первых трех битовif b0 = 0 then slp ‘Время спячкиif b0 = 1 then rt ‘Поворот направоif b0 = 2 then lt ‘Поворот налевоif b0 = 3 then fw ‘Движение
Программа для микроконтроллера
Программа для микроконтроллера Микроконтроллер 16F84 управляет работой трех сервомоторов. Наличие большого числа незадействованных шин ввода/вывода и места под программу предоставляет возможность совершенствования и модификации базовой модели
Программа PICBASIC
Программа PICBASIC ‘Шестиногий шагающий робот‘Соединения‘Левый сервомотор Pin RB1‘Правый сервомотор Pin RB2‘Сервомотор наклона Pin RB0‘Движение только впередstart:for B0 = 1 to 60pulsout 0, 155 ‘Наклон по часовой стрелке, подъем правой стороныpulsout 1, 145 ‘Левые ноги на местеpulsout 2, 145 ‘Правые
Программа на BASIC
Программа на BASIC Программа на BASIC очень проста. После нахождения адреса порта прин тера, программа управляет работой воздушного клапана через вывод 2.5 REM Контроллер соленоида воздушного клапана10 REM Джон Иовин15 REM Найти адрес порта принтера20 DEF SEG = 025 a = (PEEK(1032) + 256 * PEEK(1033))30 REM
Программа «Меркурий»
Программа «Меркурий» Практически в течение того же периода времени, начиная с 1958 г., в США также широким фронтом развернулись работы по осуществлению первой в этой стране пилотируемой космической программы «Меркурий». В конце 50-х годов в США не было достаточно мощной РН,
Программа «Аполлон»
Программа «Аполлон» Под этим названием в 60-х годах в США проводился огромный комплекс работ, основной задачей которого была высадка человека на Луну. Выполнение программы, престижное значение которой занимало далеко не последнее место, потребовало израсходования около
Программа ЭПАС
Программа ЭПАС Около полутора десятилетий космическая техника в СССР и США развивалась относительно независимо. Одним из мотивов объединения усилий явилось стремление иметь возможность оказывать взаимную помощь в космосе. Для этого необходима была прежде всего