Работа устройства
Работа устройства
Перед тем как мы приступим к конструированию робота, посмотрим на готового робота, изображенного на рис. 11.5, и проанализируем, как робот осуществляет передвижение. Треножная походка, которая использована в данной конструкции, является не единственно возможной.
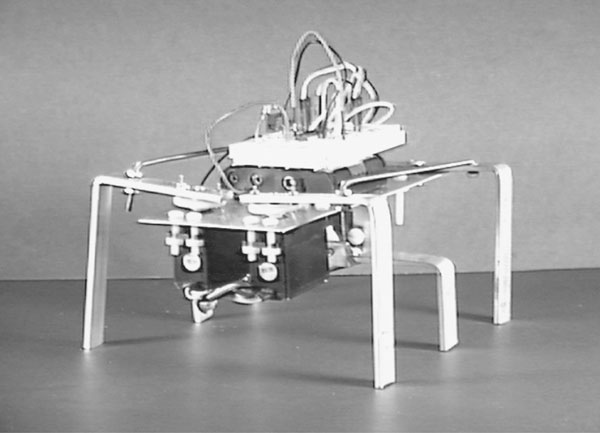
Рис. 11.5. Шестиногий ходок готов к прогулке
В передней части робота закреплены два сервомотора. Каждый из сервомоторов управляет движением передней и задней ног с соответствующей стороны робота. Передняя нога прикреплена непосредственно к ротору сервомотора и способна качаться вперед и назад. Задняя нога соединена с передней при помощи тяги. Тяга позволяет задней ноге повторять движения передней ноги вперед-назад. Две центральные ноги управляются третьим сервомотором. Этот сервомотор поворачивает центральные ноги вдоль продольной оси на угол от 20° до 30° по часовой стрелке и против часовой стрелки, что наклоняет робот вправо или влево.
Используя информацию о механизме привода ног, мы сейчас посмотрим, как наш робот будет передвигаться. Посмотрим на рис. 11.6. Мы начнем с положения покоя. Каждый кружок отмечает положение ноги. Как и в предыдущем случае, темные кружки показывают положение опорных ног. Обратите внимание, что в положении покоя средние ноги не являются опорными. Эти ноги на 3 мм короче передних и задних ног.
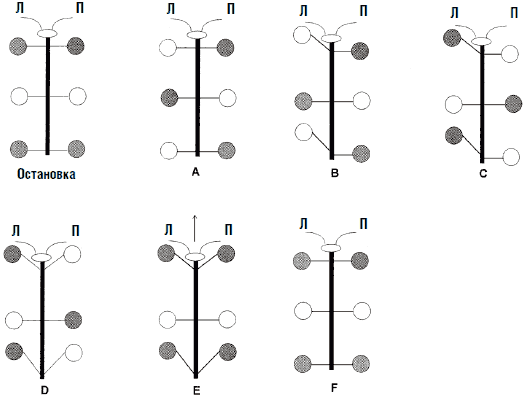
Рис. 11.6. Фазы движения шестинога
В позиции А центральные ноги поворачиваются по часовой стрелке на угол примерно 20° от центрального положения. Это приводит к наклону робота вправо. В данной позиции вес робота удерживается правой передней и задней ногами и левой центральной ногой. Это стандартная позиция «треножника», которая была описана выше. Поскольку левая передняя и левая задняя нога оказываются «в воздухе», то их можно передвинуть вперед, как показано на рис 11.6, позиция В.
В позиции С центральные ноги поворачиваются против часовой стрелки на угол примерно 20° от центральной позиции. Это приводит к наклону робота влево. В данной позиции вес робота распределяется между левой передней и задней ногами и правой средней ногой. Теперь правая передняя и задняя ноги не несут нагрузки и могут быть передвинуты вперед, как это показано на поз. D рис. 11.6.
В позиции Е центральные ноги возвращаются в среднее положение. В такой позиции робот «стоит» прямо и опирается только на передние и задние ноги. В позиции F передние и задние ноги одновременно перемещаются назад, а робот соответственно – вперед. Далее цикл движения повторяется.
Это был первый способ хождения, который я попробовал воспроизвести, и эта система работает. Вы можете разработать, совершенствовать и конструировать другие модели способов хождения, с которыми можно проводить эксперименты. Я оставлю вам разработку способов хождения назад (реверсирование) и поворотов направо и налево. Я буду продолжать совершенствовать этого робота, добавляя датчики наличия стен и препятствий, а также способов перемещения назад и поворотов.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Работа с древесиной
Работа с древесиной Домашнему мастеру приходится быть и плотником, и столяром, поэтому ему необходимо уметь пользоваться плотничным и столярным инструментом и выполнять те или другие виды работ.Плотничными работами называют приемы черновой обработки древесины –
4.1. Устройство и работа
4.1. Устройство и работа Для передачи крутящего момента от коленчатого вала двигателя к колесам автомобиля необходимо сцепление (если у автомобиля ручная КПП), коробка передач, карданная передача (для заднеприводной машины), главная передача с дифференциалом и полуоси
Работа устройства
Работа устройства Перед тем как мы приступим к конструированию робота, посмотрим на готового робота, изображенного на рис. 11.5, и проанализируем, как робот осуществляет передвижение. Треножная походка, которая использована в данной конструкции, является не единственно
Работа схемы
Работа схемы Схема содержит операционный усилитель структуры КМОП, используемый в качестве компаратора напряжений. Компаратор сравнивает значения двух входных напряжений. Одно из напряжений называется опорным и обозначается Vоп. Это значение сравнивается с входным
49. Работа проталкивания
49. Работа проталкивания Работа проталкивания. Для ее определения в уравнение: подставим равенство i = u +pv, получим в результате: где d(pv) – работа проталкивания, рассчитанная для элементарного объема,d(pv) = pdv + vdp – уравнение для элементарной работы.Соотношение (2), включающее
Лабораторная работа № 2
Лабораторная работа № 2 Тема: Определение концентрации запыленности воздуха весовым методом.Цельработы: ознакомиться с нормированием запыленности воздуха, методами и приборами контроля запыленности, измерить запыленность на имитационной установке ОТ-1 и оценить ее
Лабораторная работа № 4
Лабораторная работа № 4 Тема: Изучение первичных средств тушения пожаров.Цель работы: ознакомиться с конструкциями и применением ручных огнетушителей, с нормами их запаса для образовательных учреждений.Оборудование: огнетушители ОХП-10, ОВП-10, ОУ-2, ОП-5 (или их макеты),
Лабораторная работа № 5
Лабораторная работа № 5 Тема: Действия педагога и учащихся на пожаре в образовательных учреждениях. Составление плана эвакуации и инструкции к плану эвакуации людей в случае возникновения пожара в образовательном учреждении.Цель работы: изучить порядок и
Лабораторная работа № 6
Лабораторная работа № 6 Тема: Расследование и учет несчастных случаев с учащимися образовательных учреждениях.Цель работы: ознакомиться с порядком расследования и учетом несчастных случаев с учащимися; научиться составлять акт о несчастном случае с учащимся по форме
Такая у нас работа
Такая у нас работа (Вместо предисловия)Земля Байконура… Это не пустыня в песчаных барханах, хотя еще и не степь. Лишь весной, считанные дни, зеленеет здесь трава.Шоссе из города на стартовую площадку петляет между пологими холмами, то ныряет в низину, то поднимается на
Работа над ошибками
Работа над ошибками Ну, что ж, вот и последний предподписной номер журнала. Оглядываясь на пройденный, пока еще все-таки небольшой, путь и наблюдая за реакцией читателей на каждый новый выпуск, могу с полным основанием сказать, что журнал удался! И это несмотря на серьезную
Мужская работа
Мужская работа Владимир РАТКИН Москва«Гул моторов нарушал тишину нашего командного пункта. Вдруг я услышал, как кто-то бранится, призывая на помощь всех святых. …Вероятно, опять какая-то авария, подумал я. В этот час это было неприятно. Регулярно в десять часов вечера
2.4.3. Работа на автокранах
2.4.3. Работа на автокранах Вопрос 197. Кто допускается к управлению автокраном?Ответ. Допускаются только водители АТС, прошедшие обучение и имеющие при себе действующее удостоверение на право выполнения этой работы (п. 2.4.3.1).Вопрос 198. Что входит в обязанности водителя