Программа для тестовой схемы управления
Программа для тестовой схемы управления
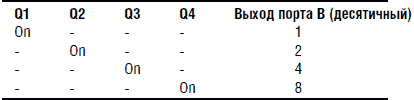
После того как тестовая схема управления изготовлена, необходимо запрограммировать PIC-микроконтроллер с помощью следующей программы на языке BASIC. Программа является очень простой и короткой, чтобы показать, насколько просто обеспечить вращение ШД. В таблице 10.3 показано, как на каждом шаге включается соответствующий транзистор. Используйте таблицу 10.3 для слежения за логикой BASIC программы. Когда вы достигаете до конца таблицы, то последовательность повторяется, начиная с начала.
Таблица 10.3. Логика переключений транзисторов для полного шага
‘Контроллер шагового двигателя
Symbol TRISB = 134 ‘Инициализировать TRISB как 134
Symbol PortB = 6 ‘Инициализировать PortB как 6
Symbol ti = b6 ‘Инициализировать ti как задержку
ti = 25 ‘Задержка 25 мс
poke TRISB,0 ‘Установить шины PORTB на выход
start: ‘Последовательность движения вперед
poke portb,1 ‘Шаг 1
pause ti ‘Задержка
poke portb,2 ‘Шаг 2
pause ti ‘Задержка
poke portb,4 ‘Шаг 3
pause ti ‘Задержка
poke portb,8 ‘Шаг 4
pause ti ‘Задержка
goto start ‘Повторение
Полный оборот
При полном шаге для завершения полного оборота ШД требуется 200 импульсов (360° /1,8° на шаг). Подсчет количества импульсов позволяет PIC-микроконтроллеру управлять и позиционировать ротор ШД.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Программа DOS управления с клавиатуры
Программа DOS управления с клавиатуры Имеется DOS программа, позволяющая управлять работой руки-манипулятора с клавиатуры компьютера в интерактивном режиме. Список клавиш, соответствующих выполнению той или иной функции, приведен в
Схемы Ми-15
Схемы Ми-15
СХЕМЫ C/KC-135
СХЕМЫ C/KC-135 Прототип Заправщик КС-135R 60-0367,1989 KC-135AVIP 61-0316 Заправщик KC-135Q 60-0346, предназначенный для работы с SR-71 Транспортный вариант С-135А 60-0377, 1965 C-135F 63-8475. Экспортный вариант заправщика для Франции Транспортный вариант С-135В 61-2663 C-135FR 64-12736. Поздний вариант французского
Схемы СБ-2М-103
Схемы СБ-2М-103 Виды сверху и снизу СБ 2М-103 № 13/221 СБ 2М-103№ 13/221 СБ 2М-103 выпуска 1940 г. СБ 2М-103 VP-10 Финляндия СБ 2М-103 SB-14 Финляндия СБ2М-103 № 1/227 СБ 2М-103 СБ 2М-103 перед парадом, 1945 г. Виды спереди, сверху, слева и справа СБ 2М-103 № 2/201 Эталон 201 серии Государственные испытания 8 июня – 26
Ил-18 Схемы
Ил-18 Схемы Прототип Ил-18 "Москва" (СССР-Л5811) с двигателями НК-4Отличительные особенности: длина фюзеляжа 35,7 м, симметричное расположение иллюминаторов левого и правого бортов, отсутствие защитной пластины на фюзеляже в зоне винтов. Первые серийные Ил-18А с двигателями
СХЕМЫ Бе-103
СХЕМЫ Бе-103 М 1:48Андрей Сальников, Дмитрий Кусачев Длина (с РЛС), м 10,65 (10,863)Высота, м 3,757Размах крыла, м 12,72Площадь крыла, м? 25,1Максимальный взлетный вес, кг 2270Вес пустого снаряженного, кг 1760Максимальный запас топлива, кг 245Максимальная полезная нагрузка, кг 385Силовая
СХЕМЫ
СХЕМЫ Микоян Гуревич МиГ25 Первый прототип перехватчика Е-155П-1 Второй прототип перехватчика Е-155П-2 Пятый прототип перехватчика Е-155П-5 МиГ-25П первой серии (1970) МиГ-25П (1975) МиГ-25М с двигателями Р-15БФ2-300 МиГ-25 с двигателями Д-30Ф МиГ-25ПД (1981) МиГ-25ПДС (1980) МиГ-25ПДЗ с системой
Схемы Сухой Т-4
Схемы Сухой Т-4 Самолет Т-4 (изд. 101)Вид спереди на земле Летающая лаборатория 100JTI-1Вид справа Самолет Т-4 (изд. 101)Вид сзади Самолет Т-4 (изд. 101)Вид спереди в полете Самолет Т-4(изд. 101)Вид снизу Самолет Т-4 (изд. 101)Вид справаЛетно-технические характеристики первого
СХЕМЫ Ли-2
СХЕМЫ Ли-2 Ли-2НБВид спереди Заделка турельного люка (после войны) ЛИ-2НБВид сзади 1 — петля передней загрузочной двери; 2 — аварийный люк экипажа; 3 — сдвижное стекло (форточка); 4 — рамочная антенна радиополукомпаса РПК-2; 5 — мачта радиоантенны; 6 — передняя
СХЕМЫ
СХЕМЫ
СХЕМЫ Ми-2
СХЕМЫ Ми-2 Компоновочная схема вертолёта Ми-й-2 1. обогреваемое стекло2. Маслобак3. Газотурбинный двигатель ГТД — 3504. Стартер — генератор СТГ-36. Вентиляторная установка7. Главный редуктор8. Втулка несущего винта9. Автомат перекоса11. Генератор переменного
Схемы Ил-22 и МиГ-31
Схемы Ил-22 и МиГ-31
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ Работы по созданию автоматизированных систем управления технологическими процессами (АСУ ТП) электроэнергетических объектов были начаты с появлением
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1). Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 –
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну:
Ловин Джон
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉