ГЛАВА 12 Самые универсальные
Обратная связь и операционные усилители
Нам нужны надежные исполнители наших поручений не только для того, чтобы добиться успеха, но также и для того, чтобы не потерпеть неудачи.
А. Дюма. Три мушкетера
Классическое определение гласит: операционным усилителем называется дифференциальный усилитель постоянного тока (УПТ) с большим коэффициентом усиления. Наличие в этом определении слов «постоянного тока» не означает, что ОУ усиливают только сигналы частотой 0 Гц, — здесь имеется в виду, что они могут усиливать сигналы, начиная с частоты 0 Гц. Слова «с большим коэффициентом усиления» означают, что он действительно большой, — хороший ОУ имеет коэффициент усиления порядка нескольких сотен тысяч или даже миллионов (куда там микросхеме TDA2030 с ее 30 тысячами!).
Название операционный закрепилось за такими усилителями исторически, потому что во времена господства ламповой техники они использовались в основном для моделирования различных математических операций (интегрирования, дифференцирования, суммирования и пр.) в так называемых аналоговых вычислительных машинах. Других применений у тех ОУ практически не было и быть не могло, потому что для достижения приемлемых характеристик не годилась не только ламповая, но и дискретно-транзисторная схемотехника. Настоящий переворот произошел только в середине 1960-х годов после пионерских работ по конструированию интегральных ОУ неоднократно уже упоминавшихся на этих страницах Робертом Видларом (рис. 12.1).
Рис. 12.1. Роберт Видлар (Robert J. Widlar), 1937–1991
Разумеется, практически использовать ОУ можно только в схемах с отрицательной обратной связью (за одним исключением, описанным далее). Огромный коэффициент усиления приведет к тому, что без обратной связи такой усилитель будет находиться в состоянии, когда напряжение его выхода равно (или, как мы увидим дальше, почти равно) одному из напряжений питания, положительному или отрицательному — такое состояние еще называют, по аналогии с транзисторами, состоянием насыщения выхода. В самом деле, чтобы получить на выходе напряжение 15 В, ОУ достаточно иметь на входе сигнал в несколько десятков микровольт, а такой сигнал всегда имеется — если это не наводка от промышленной сети или других источников, то достаточно и внутренних причин, о которых мы еще будем говорить.
Впрочем, есть и исключение — так называемые компараторы представляют собой ОУ, которые предназначены для использования без отрицательной обратной связи и иногда даже наоборот, с положительной обратной связью. К компараторам мы еще вернемся в этой главе, а пока рассмотрим некоторые общие принципы по- строения стандартных схем на ОУ.
Опасные связи
Согласно определению, отрицательная обратная связь — это связь выхода со входом, при которой часть выходного сигнала вычитается из входного. В противоположность отрицательной, в случае положительной обратной связи часть выходного сигнала со входным сигналом суммируется. Эти определения справедливы не только для усилителей и других электронных устройств, но и во всех других случаях, когда обратная связь имеет место. В общем случае можно воздействие обратной связи на некую систему описать так: наличие отрицательной обратной связи повышает ее устойчивость, наличие положительной — наоборот, ведет к неустойчивости.
* * *
Принцип обратной связи
Впервые использовать принцип обратной связи в электронных усилителях с целью повышения их линейности, устойчивости и других эксплутационных характеристик предложил американский инженер, сотрудник Лабораторий Белла (Bell Labs) Харольд Блэк в 1927 году. О сложности предмета говорит тот факт, что первый патент Блэка с описанием его усилителя имел объем целых 87 страниц, а всего он получил 347 патентов. Построение общей теории обратных связей было завершено математиком Хендриком Ваде Боде к 1945 году. В 1948 году Норберт Винер в своей знаменитой «Кибернетике» впервые показал, как использовать принцип обратной связи при рассмотрении любых систем: технических, биологических, социальных и пр.
* * *
Принцип действия обратных связей можно пояснить, скажем, на примере классической взаимосвязи спроса и предложения в экономике. Предположим, у нас имеется некая фирма, которая состоит из производственных структур и каналов сбыта. На входе такой системы — задание на производство, на выходе — объем произведенной продукции. Сколько нужно производить товара? Естественно, столько, сколько его могут потребить. В идеальной системе происходит следующее: фирма производит один экземпляр товара и, как только его покупают, немедленно выдает на прилавок следующий экземпляр. Если фирма произведет два экземпляра, и один из них на прилавке задержится, то производство приостанавливается до тех пор, пока этот экземпляр не купят. Здесь мы наблюдаем типичное действие отрицательной обратной связи, роль которой играет спрос, — лежащий на прилавке экземпляр товара как бы вычитается из задания на производство, и оно приостанавливается. Такая система очень устойчива и к тому же обладает множеством приятных свойств: не имеет перерасхода энергии и материалов, не приводит к перепроизводству или, в пределах мощности производства, наоборот, к дефициту. Объем перепроизводства может составить максимум один экземпляр, который придется выбросить, если спрос на него упал до нуля. Интересно, что примеры таких близких к идеалу производств можно встретить и в реальной жизни — это, скажем, торговля горячей выпечкой, когда следующий пирожок изготавливается только, если предыдущий уже купили.
Но в большинстве случаев в реальной жизни все обстоит гораздо сложнее: и прямых, и обратных связей существенно больше одной, реакция на спрос не может быть мгновенной, да и система не изолирована от всей остальной экономики. Посмотрим, например, что произойдет с нашей идеальной системой, если производство не может остановиться и возобновить работу мгновенно, или, что то же самое, сведения об изменении спроса поступают не сразу, а с некоторым запаздыванием.
Предположим, фирма делает 10 экземпляров товара в день, и указанное запаздывание составляет также 1 день. Допустим, в какой-то из дней спрос упал на 2 штуки. Из-за запаздывания реакции на изменение спроса в этот день фирма произведет по-прежнему 10 штук, так что на следующее утро на. прилавке их окажется 12. Если в этот день спрос по-прежнему будет составлять 8 штук, то к следующему утру на прилавке окажутся те же 12 экземпляров (8 произведенных — фирма отреагировала на изменение, плюс 4 оставшихся от предыдущего дня). Согласно реакции предыдущего дня и в этот день фирма также произведет всего 8 экземпляров. Но предположим, что в этот день спрос внезапно возрос и составил 12 экземпляров, т. е. все имеющиеся оказались раскуплены. На следующее утро на прилавке будет лежать 8 штук (произведенных накануне), и если спрос сохранится, то 4 из 12 гипотетических клиентов уйдут неудовлетворенными. Им предложат зайти через два дня, и на следующий день фирма вынуждена будет произвести 4 + 12 = 16 экземпляров товара! Легко сообразить, что будет происходить дальше с производством и удовлетворением спроса, — система станет раскачиваться все сильнее и сильнее, пока в дело не вступят естественные ограничения: объем производства не может быть меньше нуля и больше фактической мощности производства (в случае электронных систем роль таких ограничений выполняет напряжение питания или достижимая мощность выходного каскада усиления). Работоспособность системы будет полностью нарушена — отрицательная обратная связь превратилась в положительную.
Поскольку реальные системы не могут иметь нулевое запаздывание по цепям прямой и обратной связи, возникает вопрос — какие меры нужно принять для того, чтобы система не раскачивалась все сильнее и сильнее? Обсуждение теории устойчивости систем с обратной связью в общем случае (скажем, известного метода Найквиста) увело бы нас слишком далеко, однако практические меры в простых системах не так уж и сложны. В основном они сводятся к тому, чтобы ограничить коэффициент усиления исходной системы и/или глубину обратной связи на таких частотах, когда отрицательная обратная связь начинает превращаться в положительную. Иными словами, чтобы фазовый сдвиг части выходного сигнала, поступающей обратно на вход, относительно самого входного сигнала не достигал бы близких к 180° величин при сравнимой или даже большей входного сигнала амплитуде этой части (поглядите на графики суммирования синусоидальных сигналов в главе 4, чтобы лучше понять, в чем тут дело).
Грубо эти частоты можно оценить следующим образом: если задержка сигнала в ОУ составляет 1 мкс, то (при мгновенной обратной связи, как это имеет место в случае ее осуществления с помощью резистивного делителя) при подаче сигнала частотой около 1 МГц с выхода на вход усилителя фазовый сдвиг составит ровно 180°, и усилитель будет раскачиваться неограниченно. Значит, нужно сделать так, чтобы усиление самого усилителя без обратной связи еще задолго до достижения указанной частоты падало и становилось равным единице ровно на частоте, соответствующей задержке. Это и есть так называемая коррекция усилителей. Причем, чем выше установленный с помощью обратной связи коэффициент усиления (т. е. чем меньше глубина обратной связи), тем выше допустимый порог по предельной частоте исходного усилителя — это обусловлено тем, что на вход при росте этого коэффициента передается меньшая часть выходного сигнала. Разница между фазой входного сигнала ОУ после суммирования и 180 градусами называется запасом по фазе — если он невелик, то при прохождении через усилитель, скажем, сигнала прямоугольной формы на выходе могут наблюдаться выбросы или даже небольшие колебания по фронту и по спаду выходного напряжения.
Наибольшую опасность несет в себе режим с установленным коэффициентом усиления, равным единице (т. е. использование ОУ в качестве повторителя). Роберт Видлар был сторонником того, чтобы переложить заботу о коррекции ОУ на плечи пользователей, и первые его конструкции ОУ (например, μА702, выпускавшийся в нашей стране под названием 140УД1, или получивший широкую известность цА709) имели специальные выводы для коррекции с помощью внешних резисторов и конденсаторов. Разработчик мог в некоторых пределах выбирать ширину полосы пропускания частот в зависимости от установленного коэффициента усиления.
Практически же этим никто не пользовался (подобно тому, как подавляющее большинство пользователей компьютерных программ работают с установками, введенными в них разработчиками по умолчанию), и такая возможность только приводила к необходимости введения в схему лишних компонентов. Так что в настоящее время выводы для внешней коррекции сохранились лишь для некоторых моделей высокочастотных ОУ, где полоса частот — действительно критичный фактор.
* * *
Заметки на полях
Кстати, а каковы в свете всего изложенного могут быть рекомендации нашим предпринимателям из производственной фирмы? Они совершенно аналогичны методам для обеспечения стабильности ОУ — нужно ограничить глубину обратной связи и коэффициент усиления на высоких частотах. Проще говоря, им следует при наличии запаздывания не пытаться реагировать на каждый проданный или непроданный экземпляр, а выпускать некое среднее количество товара в сутки, изменяя его только, когда изменился средний объем продаж за промежуток времени, значительно больший времени реакции производства, — это равносильно ограничению усиления на высоких частотах. Если вы попробуете повторить рассуждения про нашу фирму, введя время реакции производства, скажем, на среднее за неделю количество проданных в сутки экземпляров, а не реагируя на продажи за каждые сутки, как ранее, то увидите, что система стала значительно устойчивее, хотя на ее выходе и могут наблюдаться некоторые высокочастотные колебания — т. е. количество товаров на прилавке может колебаться с частотой несколько экземпляров в день, но в среднем будет примерно следовать за колебаниями спроса.
* * *
Кстати, по всем этим причинам большинство ОУ представляют собой низкочастотные приборы — обычная частота единичного усиления f1 (т. е. частота, на которой собственный коэффициент усиления снижается до 1) для распространенных типов не превышает 1–3 МГц. Например, для использованного в схеме лабораторного источника (см. главу 9) древнего μА741 эта частота равна 0,8 МГц. Для некоторых моделей ОУ, специально предназначенных для усиления постоянного тока и медленно меняющихся сигналов, частота f1 еще меньше — скажем, для очень хорошего прецизионного ОУ МАХ478/479 она равна всего 60 кГц. С другой стороны, есть и быстродействующие ОУ, для которых f1 достигает десятков МГц. С частотой единичного усиления тесно связана другая характеристика ОУ — скорость нарастания выходного сигнала.
Не забудем также, что в реальных системах часто могут иметь место многочисленные так называемые паразитные обратные связи, учет которых весьма затруднен, если вообще возможен. Именно наличие таких связей приводит к «гудению» УМЗЧ даже в том случае, если с основными связями все в порядке, и в том числе именно для борьбы с этим явлением ставят развязывающие конденсаторы по питанию.
Основные свойства системы с отрицательной обратной связью
Отрицательная обратная связь в усилителях не только позволяет точно установить коэффициент усиления, как мы уже знаем из примеров в главах 8 и 11, но и приводит еще ко многим приятным улучшениям схемы. Попробуем разобраться, почему это так и каково влияние характеристик реальных ОУ на параметры схемы.
На рис. 12.2 приведена обобщенная схема некоторой системы, охваченной отрицательной обратной связью.
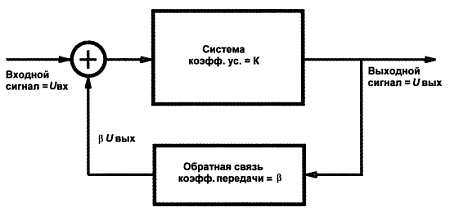
Рис. 12.2. Обобщенная схема системы с отрицательной обратной связью
Коэффициент усиления К основной системы обычно больше единицы — в случае ОУ это и есть его собственный коэффициент усиления, который может достигать сотен тысяч и миллионов. Коэффициент передачи по обратной связи β обычно, наоборот, меньше единицы (хотя ничего, кроме вышеуказанных частотных ограничений, не мешает нам сделать его и больше единицы — просто вся система тогда будет не усиливать, а ослаблять сигнал). Кружок с плюсиком в нем означает устройство для суммирования сигналов — сумматор.
Если разорвать петлю обратной связи, то сигнал на выходе Uвых был бы равен К·Uвх (разумеется, в реальной системе напряжение питания его бы ограничило, но для наших рассуждений это неважно). Однако при действии обратной связи это не так. На вход выходной сигнал передается с коэффициентом ослабления β, и сигнал после сумматора, т. е. на входе основной системы, будет равен Uвх — β·Uвых (минус, т. к. обратная связь отрицательная). Этот сигнал передается на выход с коэффициентом К, т. е. Uвых = К·(Uвх — β·Uвых), или Uвых = К·Uвх/(1 + К·β). Поскольку коэффициент передачи Кус всей системы по определению есть Uвых/Uвx, то в результате для него получаем следующую формулу:
(1)
Отсюда следует интересный вывод: если К много больше 1 (а в случае ОУ это действительно так с огромной степенью точности), то единицу в формуле (1) можно не принимать во внимание, и коэффициент передачи будет выражаться простым соотношением
Кус = 1/β. (2)
Формула (2) и означает, что коэффициент передачи входного сигнала на выход будет определяться только параметрами обратной связи и никак не зависит от характеристик системы. Причем, чем выше собственный коэффициент усиления системы К, тем точнее соблюдается это положение (мы об этом упоминали в главе 11 при сравнении характеристик УМЗЧ, построенных на фирменной микросхеме и на дискретных элементах по схеме из главы 8).
Введение отрицательной обратной связи приводит также еще к некоторым последствиям. Для практических целей достаточно их просто запомнить, не углубляясь в математические выкладки:
□ входы ОУ не потребляют тока (входное сопротивление ОУ практически равно бесконечности, точнее — увеличивается по сравнению с ОУ без обратной связи в Кβ раз);
□ ОУ с отрицательной обратной связью всегда стремится установить потенциалы на его входах равными между собой.
Характеристики конкретной схемы определяются соотношением собственного коэффициента усиления ОУ и коэффициента передачи системы с замкнутой обратной связью — чем выше это соотношение, тем ближе схема к идеалу. Интересно, что если на практике для обеспечения фактической независимости коэффициента усиления схемы от характеристик ОУ достаточно было бы иметь собственный коэффициент усиления всего в несколько тысяч (что и демонстрируют нам схемы УМЗЧ), то для того чтобы получить, например, действительно высокое входное сопротивление (измеряемое гигаомами и более), приходится увеличивать К до величин в сотни тысяч и более.
Отметим также, что использование обратной связи в указанной ранее степени уменьшает и выходное сопротивление всего усилителя, которое становится очень близким к нулю — точнее, примерно равным Rвых(1 +Кβ), где Rвых — это собственное выходное сопротивление ОУ, лежащее обычно в диапазоне сотен ом. Так что выходное сопротивление получается порядка 1 миллиома. Только не забывайте, что мощность выходного каскада ограниченна, и если вы его перегрузите, то от падения напряжения на нагрузке вас уже никакая обратная связь не спасет. Для общего развития попутно заметим, что в системе, представленной на рис. 12.2, ничего не изменится, если схему перевернуть: считать за усилитель узел обратной связи, за узел обратной связи для него — сам усилитель, за входной сигнал — выходной и наоборот.
Типичный пример такой двойственности мы увидим в схеме простейшего термостата далее. Все зависит только от терминологии, ^которая есть лишь вопрос удобства. Это хорошо иллюстрирует то философское положение, что мы слишком часто оперируем реальными вещами в зависимости от того, как мы их назвали, в то время как на самом деле их поведение совершенно от этого не зависит.
Базовые схемы усилителей на ОУ
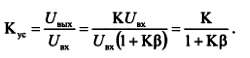
Схема неинвертирующего усилителя (рис. 12.3, а) нам хорошо знакома — именно она составляет основу лабораторного источника питания из главы 9 (см. рис. 9.12). Анализ ее элементарно прост и исходит из рассмотренных ранее правил: Uoc = Uвх, т. е.:
Uвх= Uвых·R2/(R1 + R2).
Тогда коэффициент усиления:
Кус = Uвых/Uвх = (R1 + R2)/R2 = 1 + R1/R2,
каким мы его и предполагали в главе 9.
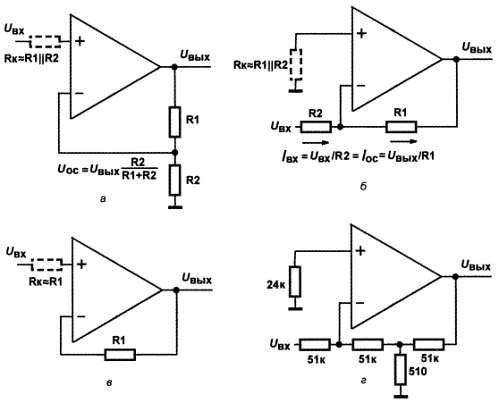
Рис. 12.3. Базовые схемы на ОУ:
а — неинвертирующий усилитель; б — инвертирующий усилитель, в — повторитель; г — инвертирующий усилитель с высоким коэффициентом усиления
Единица, которая плюсуется к отношению сопротивлений резисторов обратной связи в выражении для коэффициента усиления, — очень важное дополнение, потому что если убрать в схеме неинвертирующего усилителя резистор R2 (т. е. принять его равным бесконечности), то отношение сопротивлений станет равным нулю, а Кус — равным 1. Соответствующая схема показана на рис. 12.3, в и носит название повторителя. Зачем она нужна, если ничего не усиливает? Эта схема обладает одним бесценным свойством: ее входное сопротивление равно практически бесконечности, а выходное — практически нулю (в пределах, конечно, мощности выходного каскада, как мы уже говорили). Поэтому повторитель очень часто используют в случаях, когда нужно согласовать источник сигнала с высоким выходным сопротивлением с низкоомным приемником, и мы еще увидим примеры такого согласования.
В неинвертирующем усилителе обратная связь носит название обратной связи по напряжению. В отличие от него, в инвертирующем усилителе (рис. 12.3, б) обратная связь имеет характер обратной связи по току, и вот почему. Так как здесь неинвертирующий вход имеет потенциал «земли», то и инвертирующий тоже всегда будет иметь такой же потенциал. Следовательно, от входа через резистор R2 потечет некий ток (Iвх). А раз мы договорились, что сам вход ОУ тока не потребляет, то этот ток должен куда-то деваться, и он потечет через резистор R1 на выход ОУ.
Таким образом, входной ток (Iвх) и ток обратной связи (Iос) — это один и тот же ток. Причем потенциал выхода ОУ вынужденно станет противоположным по знаку потенциалу входа — иначе току некуда будет течь. Чему равен коэффициент усиления? Поскольку Uвх/R2 = Uвых/R1, то Кус = Uвых/Uвх = R1/R2. Обратите внимание, что в этом случае, в отличие от неинвертирующей схемы, единицу прибавлять не нужно. Поэтому R2 в данном случае есть необходимый элемент схемы и не может равняться ни нулю, ни бесконечности, за исключением того случая, когда источник сигнала сам по себе представляет источник тока, а не напряжения, — тогда R2 из схемы можно (и нужно) исключить и подать токовый сигнал прямо на вход ОУ.
Похожее на приведенные соотношения уравнение для коэффициента усиления мы получали при рассмотрении транзисторного усилительного каскада в главе 6, где оно было равно отношению коллекторной нагрузки к сопротивлению в эмиттерной цепи. Это обусловлено тем, что в транзисторном каскаде также имеет место обратная связь.
Отметим, что подавать именно нулевой потенциал на неинвертирующий вход совершенно необязательно — скажем, если вы используете однополярный источник питания, то на неинвертирующий вход подается потенциал «искусственной средней точки», как это было сделано в схеме УМЗЧ из главы 11. Можно и любой другой, и мы еще будем этим широко пользоваться.
Максимальное значение выходного напряжения ОУ не всегда может равняться положительному или отрицательному напряжению питания — как правило, оно меньше его на величину порядка 0,5–1,5 В (простейшим примером для понимания того, почему это так, служит наш звуковой усилитель из главы 8). То же самое относится и к входным напряжениям — как правило, достигать значений питания не разрешается. Однако многие современные типы ОУ это все же позволяют, и выходное/входное допустимое напряжение у них достигает значений питания (чаще — только одно выходное). Это свойство в западной технической документации обозначается как Rail-to-Rail (т. е. «от шины до шины»), и на него нужно обращать внимание при выборе ОУ. При этом следует учитывать, что выходное напряжение может достигать напряжения питания только на холостом ходу, а с подключением нагрузки оно снижается.
Мы сейчас ведем речь об ОУ общего применения, к которым относятся старички μА741 (К140УД7), отечественные 140УД6, 140УД8 (последний — с полевыми транзисторами на входе) или счетверенный LM324 (который поддерживает Rail-to-Rail по входу и, частично — в отношении потенциала «земли», — по выходу), но, конечно, есть и более современные типы, многие из которых упоминаются далее. Как выбрать подходящий ОУ из всего разнообразия, имеющегося на рынке? Кроме очевидных характеристик, таких как ток потребления и допустимое напряжение питания, следует учитывать параметры, которые характеризуют неидеальность ОУ.
Неидеальность ОУ, ее последствия и борьба с ними
Если входное сопротивление неинвертирующего усилителя равно практически бесконечности, то инвертирующего почти в точности равно R2. Почти — по ряду различных причин, на которых мы не будем останавливаться, потому что эта разница несущественна для практических нужд. Важнее другое — входы реального ОУ все же потребляют ток, называемый током смещения, хотя и очень небольшой. Ток смещения на инвертирующем входе (в любой из двух схем) создаст падение напряжения на резисторе обратной связи, и оно воспринимается как входной сигнал. Если этот ток равен, к примеру, 0,2 мкА (казалось бы — так мало!), как у нашего любимого μА741, то при сопротивлении R1 = 1 МОм напряжение на выходе при отсутствии напряжения на входе достигнет 0,2 В.
Как обычно, в большинстве случаев важно не само по себе смещение, а его нестабильность. Борьба с этим явлением может вестись в трех направлениях: во-первых, не следует использовать в цепочке обратной связи сопротивления большого номинала, стандартный диапазон их — от килоом до десятков килоом. Если же при необходимости сохранить достаточно высокое входное сопротивление инвертирующего усилителя при большом коэффициенте усиления применение высокоомных резисторов желательно, то следует использовать схему, показанную на рис. 12.3, г.
В данном случае вся цепочка в обратной связи работает, как один резистор с номинальным сопротивлением 5,1 МОм, и коэффициент усиления равен 100 при входном сопротивлении 50 кОм.
Во-вторых, в схему следует вводить компенсирующий резистор Rк (на рис. 12.3, а-в он показан пунктиром) — падение напряжения от тока смещения по неинвертирующему входу на нем отчасти компенсирует падение напряжения по входу инвертирующему. Тогда будет уже не столь важен сам ток смещения, сколько разница токов смещения, потребляемых по каждому из входов усилителя, которая определенно меньше каждого из токов.
В-третьих, если наличие именно тока смещения критично, то можно выбрать ОУ с малыми токами смещения — например, с полевыми транзисторами на входе. Так как сами токи там исчезающе малы, то их разница, естественно, вообще может не приниматься во внимание.
Правда, в ОУ с полевыми транзисторами еще больше, чем в обычных ОУ, проявляется другая напасть — входное напряжение сдвига[14], которое есть величина разности напряжений между входами, при котором выходной сигнал ОУ в точности равен нулю. Возникает оно вследствие нестрогой идентичности транзисторов входных каскадов, и для разных типов ОУ имеет довольно большой разброс: от десятков микровольт у прецизионных ОУ до единиц и даже десятков милливольт у ОУ с полевыми транзисторами. Естественно, оно, как и токи смещения, зависит от температуры. Бороться с напряжением сдвига гораздо сложнее, чем с токами смещения. Во многих типах ОУ традиционно имеются специальные выводы, присоединив к которым переменный резистор, можно регулировать смещение нуля на выходе. Однако пользоваться этой возможностью я не рекомендую (ничего хорошего в перекосе входного дифференциального каскада внешним вмешательством нет), и практических схем, где ей пользуются, я не встречал — подобно тому, как никто не пользуется возможностью внешней коррекции частотной характеристики, предусмотренной Видларом. Потому у большинства современных ОУ таких выводов нет.
В критичных случаях проще выбрать прецизионный ОУ с минимальным сдвигом, которых сейчас предлагается довольно много, — укажем на упоминавшиеся уже МАХ478 (сдвоенный) и МАХ479 (счетверенный), отличающиеся, кстати, исключительно широким диапазоном допустимых напряжений питания: от ±2,2 до ±18 В при очень небольшом потреблении — не более 25 мкА на каждый усилитель при максимальном напряжении питания. Правда, они довольно медленные (полоса усиления — десятки килогерц), но для схем по постоянному току быстродействие не имеет значения.
* * *
Подробности
К сожалению, усилители МАХ478, которые мы будем в этой книге широко применять, фирмой MAXIM более не выпускаются (фирма, по моим наблюдениям, отходит от производства прецизионных ОУ). Без изменений в схеме и в погрешностях они могут быть заменены, например, на модели фирмы Analog Devices OP193/OP293/OP493 (соответственно, одинарный/сдвоенный/счетверенный) или на ОР2177/ОР4177 (питание от ±2,5 до ±15 В) или, с некоторым увеличением погрешности, на ОР290/ОР490 (питание от ±0,8 до ±18 В). Очень хороший прецизионный усилитель — ОР97 с питанием до ±20 В, смещением всего 20 мкВ и вдесятеро большим быстродействием, чем у МАХ478, только он имеет повышенное потребление 0,6 мА и выпускается лишь в одинарном корпусе, а не сдвоенным/счетверенным. Если не жадничать и ограничиться питанием до ±5–6 В (как и будет в большинстве схем с ОУ далее), то малопотребляющих прецизионных ОУ можно найти больше: для примера укажем ОР196/ОР296/ОР496 (питание до ±6 В, потребление 60–80 мкА, Rail-to-Rail по входу и, практически, по выходу). Только при выборе учтите, что в характеристиках часто указывают суммарное напряжение питания (так, если указано, что максимальное напряжение питания может составлять 6 В, то двухполярное должно составлять, соответственно, не более ±3 В, таких типов сейчас выпускается больше всего). Ориентироваться нужно на напряжение смещения (Input Offset Voltage) не более 100–200 мкВ, и учитывать возможности размаха напряжения по выходу и по входу (в большинстве случаев они ограниченны). Если в схеме еще критично и потребление, то из кажущегося разнообразия типов останется не так уж и много вариантов.
* * *
Укажем — до кучи — еще один довольно экзотический, но, тем не менее, использовавшийся на практике до самого последнего времени способ борьбы со всеми этими сложностями — в случаях, требующих особой точности, всю схему вместе с ОУ попросту размещали в термостате! Как проектировать термостаты, мы узнаем в конце главы, а пока вернемся на землю.
Из тех ситуаций, когда требуется особо точное усиление некоего сигнала постоянного тока, все же имеется выход без использования подобной экзотики. Во-первых, это так называемые МДМ-усилители (от «модулятор-демодулятор», подобно «модему»). Их широко применяли еще в ламповые времена, т. к. тогда усилители постоянного тока с более-менее приемлемыми характеристиками строить было больше не из чего. В основе МДМ-усилителей лежит довольно остроумная идея — модулировать входным сигналом некое переменное напряжение относительно высокой частоты, усилить полученное переменное напряжение с меняющейся амплитудой, что значительно проще, потому что при этом все неприятные сдвиги смещения остаются за бортом, после чего опять детектировать, выделив постоянную составляющую.
К сожалению, и здесь есть свои подводные камни (низкая предельная частота, невысокий коэффициент усиления, вероятность просачивания модулируемой частоты на выход, наконец, дороговизна), поэтому большее распространение получили так называемые операционные усилители, стабилизированные прерыванием (chopper stabilized amplifiers). Внутри таких ОУ автоматически производится периодическая компенсация смещения входных параметров. Для разработчика — это просто обычный ОУ, имеющий весьма высокие характеристики: типичное напряжение сдвига составляет 5-10 мкВ, коэффициент усиления — более 106, очень маленький входной ток смещения (порядка долей наноампера, как у ОУ с полевыми транзисторами) и т. п., при полосе единичного усиления порядка сотен килогерц или единиц мегагерц. К ним относятся отечественные 140УД21 и 149УД24, а также МАХ420, МАХ430/432, ICL7652, AD8629/AD8630, AD8638/AD8639 и др.
Дифференциальные усилители
Кроме всего прочего, ОУ имеют замечательное свойство подавлять синфазный входной сигнал. Синфазный сигнал, в отличие от обычного, дифференциального — то напряжение, которое действует на оба входа сразу. Это свойство приводит не только к возможности выделять полезный сигнал на фоне значительных наводок, но и, что иногда еще важнее, к подавлению нестабильности источника питания — ведь изменение напряжения питания равносильно действию синфазного входного сигнала.
На рис. 12.4, а показана схема простейшего дифференциального усилителя. Делитель R3-R4 по неинвертирующему входу служит сразу двум целям: во-первых, он выравнивает входные сопротивления по входам (нетрудно показать, что так как потенциалы самих входов ОУ равны, то равны и входные сопротивления, — естественно, при указанном на схеме равенстве соответствующих резисторов), во-вторых, что еще важнее, он делит входной сигнал ровно в такой степени, чтобы коэффициенты усиления по инвертирующему и неинвертирующему входам сравнялись между собой. Именно при этом условии коэффициент ослабления синфазного сигнала (КОСС) будет максимальным. Для того чтобы получить действительно высокий КОСС (ослабление синфазного сигнала тысяч в десять раз и более), согласование сопротивлений должно быть как можно более точным, и в такой схеме следует применять прецизионные резисторы из ряда с погрешностью, по крайней мере, не превышающей 0,1 %, причем лучше всего их еще и дополнительно подобрать по строгому равенству. Тогда вы действительно сможете без проблем выделить полезный сигнал в 1 мВ на фоне наводки в 1 В.
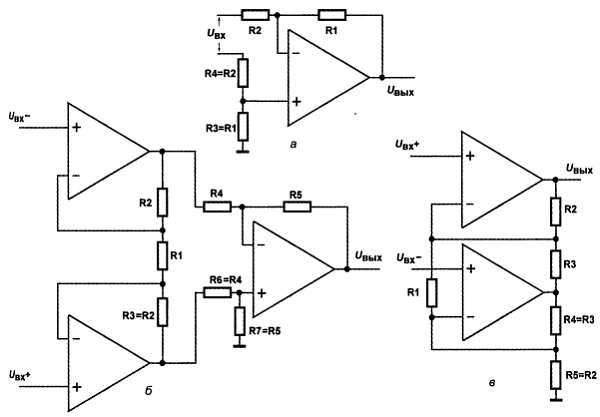
Рис. 12.4. Схемы дифференциальных усилителей:
а — простой дифференциальный усилитель; б — классический инструментальный усилитель; в — упрощенный инструментальный усилитель
Понятно, что заниматься подобными извращениями при массовом производстве не с руки, да и входными сопротивлениями наш простейший дифференциальный усилитель отличается не в лучшую сторону, потому на практике эту схему применяют редко. Ко всему прочему, в ней еще и почти невозможно изменять коэффициент усиления в процессе работы, если вдруг это понадобится, — тогда потребуется менять одновременно два резистора, а куда денется в таком случае наше согласование?
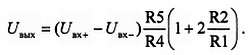
Для того чтобы увеличить входное сопротивление, целесообразно добавить еще пару ОУ по каждому входу, включенных повторителями. Причем к раздуванию габаритов схемы это практически не приводит, т. к. специально для таких целей выпускают упоминавшиеся сдвоенные (dual) и счетверенные (quad) ОУ в одном корпусе. В результате получаем (рис. 12.4, б) классическую схему так называемого инструментального усилителя, в которой усиление можно менять одним резистором R1, не нарушая ничего в работе усилителя.
Коэффициент усиления такого усилителя определяется по формуле (при указанных на схеме соотношениях резисторов):
Кстати, резисторы компенсации тока смещения здесь не нужны — токи эти по общим для системы инвертирующему и неинвертирующему входам взаимно компенсируют влияние друг друга, тем более если ОУ расположены на одном кристалле.
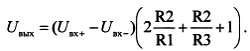
Если мы люди не гордые, и большой КОСС нам не требуется (т. е. в случае, когда помеха мала по сравнению с полезным сигналом), можно упростить схему инструментального усилителя. За исключением КОСС, схема на рис. 12.4, в обладает всеми достоинствами классической, но содержит на один ОУ меньше (значит, можно использовать сдвоенный, а не счетверенный чип), да и резисторов там поменьше. При указанных на схеме соотношениях резисторов выходное напряжение такого усилителя будет равно:
Естественно, в этих усилителях решительно не рекомендуется подгонять ноль выходного напряжения с помощью нарушения баланса резисторов (например, R4/R5 и R6/R7 в схеме рис. 12.4, б). В то же время иногда установка нуля необходима, т. к. начальное смещение выхода может быть, например, отрицательным (и не только вследствие смещения самих ОУ, но и по причине начального смещения у источника сигнала), и в случае, если весь диапазон изменения выходного напряжения должен располагаться в положительной области (скажем, при подаче его куда-нибудь на вход аналого-цифрового преобразователя, отрицательных напряжений не «понимающего»), вы можете потерять заметный кусок диапазона. Иногда для установки нуля рекомендуют воспользоваться корректирующими выводами одного из входных ОУ, но в сдвоенных и счетверенных вариантах эти выводы обычно отсутствуют, просто вследствие элементарной нехватки контактов корпуса, и это дополнительно удержит нас от такой глупости. В действительности установку нуля лучше осуществлять со стороны входов — подмешивая к одному из входных напряжений через развязывающий резистор небольшой ток коррекции. Как это осуществляется на практике, мы увидим, рассмотрев еще несколько типовых схем на ОУ.
Другие распространенные схемы на ОУ
В начале главы я упоминал о том, что операционные усилители получили свое название потому, что применялись для моделирования математических операций.
Схема аналогового сумматора (рис. 12.5, а) есть одна из таких классических схем. Представляет собой она обычный инвертирующий усилитель, на который подается несколько входных напряжений, — каждое от своего источника. Легко сообразить, что в этой схеме коэффициент усиления будет для каждого из входов определяться соотношением резистора обратной связи R1 и соответствующего входного резистора — так, как если бы остальных входов и не существовало. Потому сигнал на выходе будет равен (усиленной) сумме сигналов на входе (с противоположным знаком).
В простейшем случае, если все резисторы (включая и R1) равны между собой, то выходное напряжение будет равно просто сумме входных. Если же значения резисторов варьировать, то можно получить так называемую взвешенную сумму — когда каждый из входных сигналов вносит вклад в общее дело в соответствии с заданным ему коэффициентом. Кстати, если взять схему простого дифференциального усилителя (см. рис. 12.4, а) и заменить в ней резистор R4 такой же многовходовой цепочкой, то получится неинвертирующий сумматор. А если то же самое проделать еще и на инвертирующем входе, то получим сумматор, в котором весовые коэффициенты могут иметь разные знаки. Сумматор был неотъемлемой частью систем моделирования дифференциальных уравнений, для решения которых операционные усилители в составе аналоговых машин изначально и использовались.
Второй необходимой составляющей таких машин был интегратор на ОУ, схема которого приведена на рис. 12.5, б. Этот интегратор, в отличие от интегрирующей RC-цепочки из главы 5, действительно осуществляет операцию интегрирования в корректной форме. Например, если подать на его вход постоянное напряжение (отрицательное), то напряжение на выходе будет линейно возрастать со скоростью Uвх/RC вольт в секунду (интеграл от константы есть прямая линия). Входной сигнал можно подать и на неинвертирующий вход, заземлив резистор R — получим неинвертирующий интегратор. Можно также объединить интегратор с сумматором — тогда интегрирование будет осуществляться по сумме входных напряжений с соответствующими весовыми коэффициентами. Интеграторы, как и сумматоры, используются и по сей день в различных схемах.
На рис. 12.5, в приведена любопытная схема, которая в зависимости от состояния ключа К меняет знак напряжения на выходе.
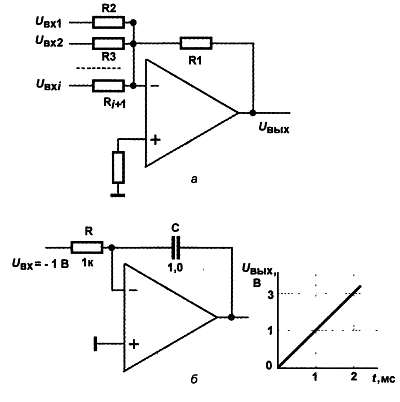
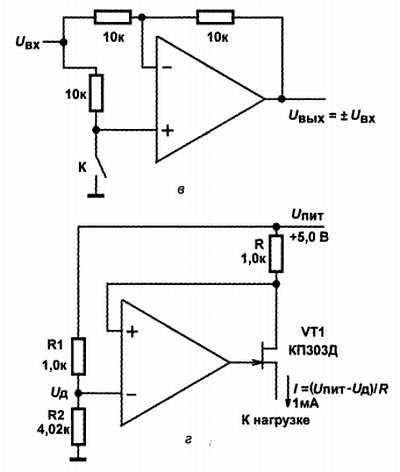
Рис. 12.5. Распространенные схемы на ОУ:
а — аналоговый сумматор, б — интегратор, в — повторитель/инвертор; г — источник тока
Если К замкнут, то это инвертирующий усилитель с коэффициентом усиления, равным 1. Если же ключ разомкнут, то схема превращается в повторитель — ведь потенциалы во всех точках схемы в этом случае должны быть равны. В качестве ключа очень удобно использовать, скажем, транзистор или малогабаритное электронное реле — тогда такая схема может пригодиться для автоматического изменения знака усиления при необходимости отобразить отрицательную часть диапазона напряжений на входе в положительную область. Подобная задача может возникнуть, скажем, для датчиков, показывающих температуру, — и выше нуля градусов Цельсия, и ниже его характеристика должна быть возрастающей, т. к. абсолютное значение величины температуры возрастает в обоих случаях, в то время как сам сигнал с выхода датчика меняется линейно в одну сторону.
Еще одна давно обещанная и очень полезная схема (рис. 12.5, г) представляет собой почти идеальный источник тока с выходным сопротивлением, равным бесконечности. Здесь может использоваться однополярное питание, что и показано на схеме. Ток можно задавать как соотношением резисторов делителя R1-R2, так и резистором R. Обратите внимание, что отрицательная обратная связь подается на неинвертирующий выход ОУ, — поскольку здесь применен полевой транзистор с n-каналом, и стабилизируется его стоковое напряжение, которое есть инверсия напряжения на затворе. Если взять транзистор с p-каналом, то его в этой схеме нужно подключить наоборот — стоком в направлении нагрузки, а обратную связь, снимаемую с истока, подавать нормально, на инвертирующий вход.
Для высокой стабильности тока в этой схеме требуется столь же высокая стабильность напряжения питания, поэтому если важна абсолютная величина тока, то резисторы приходится питать от отдельного прецизионного стабилизатора (не только делитель R1-R2, но и цепь резистора R). От характеристик транзистора стабильность тока почти никак не зависит, единственное требование — чтобы начальный ток стока превышал установленный выходной ток схемы. Если применить не полевой, а биполярный транзистор, то будет иметь место некоторая зависимость выходного тока от изменений базового тока транзистора (ибо коллекторный ток отличается от эмиттерного на величину тока базы), потому чаще в таких источниках применяют полевые транзисторы.
Аналоговый генератор
Еще в главе 2 я обещал, что нами будет построен генератор для домашней лаборатории. Вообще-то их нам требуется два: цифровой (выдающий прямоугольные импульсы) и аналоговый (генератор синусоидальных колебаний). Объединять их в одной конструкции, как это чаще всего делают, неудобно, потому что синусоидальный генератор должен выдавать переменное напряжение с амплитудой в минус и в плюс, а цифровой — однополярное пульсирующее, т. е. от нуля до плюса питания. Поэтому цифровым генератором мы займемся в главе 16, после изучения двоичных счетчиков, а пока сделаем аналоговый.
Принципиальная схема его приведена на рис. 12.6. Она выполнена по широко распространенной схеме генератора Вина — Робинсона. Для того чтобы генератор выдавал именно синусоидальные колебания, коэффициент усиления ОУ должен быть в этой схеме равен ровно 3 — если он меньше, то генератор просто не запустится, если больше — верхушки синусоид начнут обрезаться, и в пределе выходные колебания станут прямоугольными.
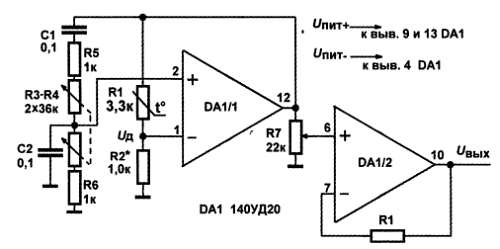
Рис. 12.6. Схема лабораторного генератора синусоидальных колебаний
Разумеется, подбором компонентов установить коэффициент усиления с нужной точностью невозможно. Поэтому применяют хитрый метод — в обратную связь ставят элемент, сопротивление которого зависит от среднего значения напряжения на нем. Проще всего оказалось использовать для этой цели термозависимые резисторы. В нашем случае используется термистор, у которого зависимость сопротивления от выделяющейся мощности имеет отрицательный наклон. В результате при увеличении амплитуды напряжения на выходе генератора его сопротивление падает, и нужный коэффициент устанавливается автоматически. Можно использовать также обычную маломощную лампочку для карманного фонарика — только наклон зависимости у нее положительный, потому ее следует ставить вместо резистора R2, a R1 тогда оставить постоянным. Для того чтобы обратная связь с лампочкой работала, от ОУ может понадобиться достаточно большой выходной ток, и тогда следует добавить к нему умощняющий выходной каскад на транзисторе (например, как в лабораторном источнике на рис. 9.12). Есть и более тонкие способы стабилизации коэффициента усиления (скажем, с использованием полевого транзистора в обратной связи, см. [19]), но опыт показывает, что и этот старинный рецепт, еще времен господства ламповой схемотехники, прекрасно работает.
Схему по рис. 12.6 можно собрать всю сразу. Здесь можно использовать любой ОУ общего применения. Показанный на схеме сдвоенный ОУ типа 140УД20 представляет собой два знакомых нам μА741 (140УД7), размещенных в одном корпусе. С ними генератор будет приемлемо работать до частот в несколько десятков килогерц. Напряжения питания могут составлять от ±5 до ±20 В, удобно выбрать напряжение около ±7–8 вольт, т. к. большие амплитуды практически никогда не требуются. Термистор может быть любого типа, но не слишком большой по размерам, чтобы он разогревался малыми токами (например бусинковый отечественный СТ1-19, СТЗ-19 или импортный каплевидный B57861-S близкого номинала).
Наладка будет заключаться в подборе резистора R2 под конкретный экземпляр термистора. Его нужно подобрать так, чтобы сигнал на выходе был чисто синусоидальным, без искажений. Частота регулируется сдвоенным резистором R3-R4. При указанных на схеме номиналах минимальная частота получится около 30 Гц, а максимальная — около 1 кГц. Чтобы расширить диапазон частот, придется поставить сдвоенный переключатель на несколько положений и изменять им емкости конденсаторов. Удобно, например, подобрать сопротивление резисторов R5 и R6 так, чтобы диапазон частот составлял 30-330 Гц, тогда, меняя с помощью переключателя емкости конденсаторов в десять раз (0,1 мкФ, 0,01 мкФ, 1 нФ), вы будете иметь перекрывающиеся диапазоны 30-330, 300-3300 и 3000-33 000 Гц. Обратите внимание, что никакой особой подгонки по равенству номиналов резисторов и конденсаторов не требуется, схема будет работать при любых (в разумных пределах) соотношениях номиналов, и равенство здесь выбрано только из соображений удобства расчета. Амплитуда сигнала на выходе регулируется потенциометром (R7 на схеме), а чтобы иметь низкое выходное сопротивление, добавлен повторитель на втором ОУ из корпуса.
Немало других интересных применений ОУ вы можете найти в многочисленной литературе, например, в классических трудах [4, 11]. А мы на этом с рассмотрением принципов использования ОУ закончим и займемся конструированием практических схем.
Конструируем термостаты
Термостат, т. е. устройство для поддержания температуры, — простейшее техническое устройство из класса гомеостатов, т. е. систем, которые автоматически поддерживают значение некоей величины на заданном уровне. Яркий пример хорошо всем знакомого гомеостата — наш собственный организм, в котором непрерывно с высочайшей точностью поддерживаются оптимальные значения таких величин, как температура, концентрация кислорода в крови, уровень адреналина и прочих параметров, причем практически независимо от вашей воли. Эти системы продолжают работать до тех пор, пока вы живы. Многие болезни есть следствие или причина расстройств гомеостатических функций организма, типичный случай — простуда, при которой в том числе работа термостатирующей системы сдвигается таким образом, что температура начинает расти.
Ключевой особенностью всех гомеостатов является обязательное наличие отрицательной обратной связи, на что обратил внимание еще отец кибернетики Норберт Винер. Поэтому любой гомеостат можно в принципе свести к обобщенной блок-схеме по рис. 12.2. На примере термостатов можно научиться создавать несложные регуляторы любой физической величины — все зависит от датчика и исполнительного механизма, — причем особо не вникая в сложнейшую теорию автоматического регулирования и управления.
Конструировать термостаты одновременно и просто, и сложно. В частности, со схемотехнической точки зрения термостаты конструировать проще, чем регуляторы других величин. Процесс нагревания очень инерционен, и любой нагревательный элемент, кроме уж совсем миниатюрных (вроде нагревателей в головках термопринтеров), является естественным фильтром низких частот, как мы видели в предыдущем разделе. Поэтому при конструировании термостатов, как правило, не возникают какие бы то ни было проблемы, связанные с фазовыми сдвигами и возможным переходом всей системы в автоколебательный режим, не нужно возиться со сложными схемами дифференциальных или интегральных регуляторов (для других величин это может быть далеко не так). Зато это же самое свойство процесса нагревания заставляет внимательнее относиться к собственно конструкции термостата — стоит расположить датчик в неподходящем месте или не обеспечить равномерное распределение тепла, й качество регулирования резко падает, вплоть до полной неработоспособности устройства.
Термостат вообще
На рис. 12.7 приведена типовая структурная схема термостата. Следует отметить, что для полноты картины в приведенной структурной схеме не хватает одного компонента — холодильного устройства. Термостат, который показан на схеме, может поддерживать температуру только выше температуры окружающей среды — в чем, впрочем, большинство практических задач в области техники и заключается. Введение холодильного агрегата не представляет никаких трудностей теоретически, но есть не всегда тривиальная задача практически, т. к. холодильник — сами знаете, насколько это громоздкая конструкция. Сейчас мы рассмотрим работу схемы без охлаждения, а затем поглядим, с какого бока туда можно пристроить холодильник, если вдруг это понадобится.
* * *
Заметки на полях
Интересно, что схема на рис. 12.7, кроме всего прочего, служит ярким примером упомянутого ранее положения о двойственности систем с обратной связью: за объект, подлежащий регулированию (на рис. 12.2 — верхний квадратик), здесь естественно принять среду, в которой мы поддерживаем температуру. В этом случае элементами обратной связи становится усилитель и остальные компоненты схемы. Но ничто нам не мешает — и с технической точки зрения это гораздо логичнее — рассматривать в качестве регулируемого объекта усилитель, и тогда наоборот, все остальное есть лишь элементы обратной связи для него! В том, что и тот, и другой подходы равнозначны, вы убедитесь далее.
* * *
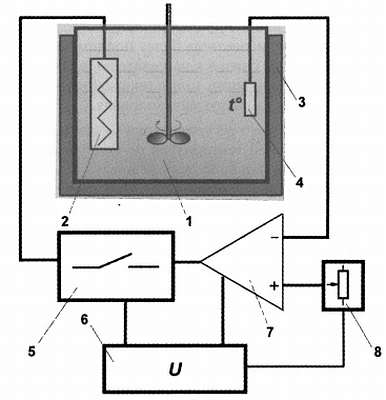
Рис. 12.7. Обобщенная схема термостата:
1 — объект регулирования; 2 — нагреватель, 3 — теплоизоляция, 4 — датчик температуры; 5 — исполнительное устройство, 6 — источник питания; 7 — усилитель; 8 — задающее устройство
Итак, мы имеем некий объект регулирования (1), который условно показан на схеме, как бак с водой. Пусть сначала — сразу после включения системы — температура в нем ниже необходимой. Предположим, что датчик температуры (4) имеет характеристику с положительным наклоном — т. е. сигнал на нем увеличивается с увеличением температуры. Выходной сигнал этого термодатчика представляет собой напряжение в некотором диапазоне, которое поступает на инвертирующий вход операционного усилителя (7). Конечно, не все датчики температуры выдают непосредственно напряжение на выходе, чаще у них от температуры зависит какой-нибудь физический параметр (например, сопротивление), но преобразовать этот параметр в напряжение обычно несложно, и мы еще этим будем заниматься.
Усилитель сравнивает сигнал датчика с сигналом, поступающим с задающего устройства (8), — так называется устройство, которым мы можем устанавливать нужную нам температуру в системе. В простейшем случае это переменный резистор, включенный по схеме потенциометра, с которого можно снимать напряжение в таком диапазоне, чтобы его крайние значения соответствовали сигналу с датчика при крайних значениях нужного нам диапазона температур.
Поскольку в начальный момент температура, как мы договорились, меньше заданной, то напряжение с термодатчика ниже напряжения сигнала с задающего устройства, и на выходе усилителя будет большое положительное напряжение насыщения выхода ОУ (меньшее напряжение поступает на инвертирующий вход, потому выход положителен). Это напряжение приведет в действие исполнительное устройство, которое на схеме условно показано в виде контактов реле, — в простейшем случае это и есть реле, электромеханическое или электронное, которое своими контактами подает напряжение от источника питания (например, прямо от бытовой сети) на нагреватель.
Обратная связь для усилителя замыкается через сам объект: когда нагреватель достаточно прогреет воду в баке, сигнал с термодатчика превысит установленный с помощью задающего устройства уровень, напряжение на выходе усилителя упадет до нуля (или даже станет отрицательным — если питание усилителя двухполярное), исполнительное устройство снимет питание с нагревателя, и вода начнет остывать, пока температура датчика вновь не достигнет заданного значения — теперь уже «сверху», т. е. со стороны больших значений температуры, чем заданная.
Вы не поверите, сколько подводных камней кроется в такой, казалось бы простой и понятной системе! Начнем с того общего положения, что термостат всегда поддерживает температуру в той, и только в той точке, в которой установлен датчик. Поэтому если вода в нашем баке плохо перемешивается, то обязательно возникнет ситуация локального перегрева — вплоть до того, что вокруг нагревателя вода может уже закипеть, а датчик так и останется холодным. Датчик при этом еще может быть установлен «не в том месте», например, слишком близко ко дну, в то время как теплая вода от нагревателя будет подниматься вверх. А если датчик установить, наоборот, слишком близко к нагревателю и, тем более, прямо над ним, в потоке поднимающейся теплой воды, то все произойдет наоборот — система сработает слишком рано, когда вода вокруг еще холодная.
Поэтому первое условие хорошего регулирования — как можно более интенсивное перемешивание среды, в которой температура регулируется. На рис. 12.7 для этой цели изображена мешалка, но, конечно, перемешивать можно и другими способами. Во многих случаях — когда это возможно — бак следует также укутывать теплоизоляцией, а стенки для более равномерного распределения температур делать металлическими. Обратите внимание, что системы климат-контроля в автомобилях, которые устроены в принципе точно так же, как описано (только среда — воздух, а не вода), для эффективной работы требуют минимума притока внешнего воздуха (фактически та же теплоизоляция) и интенсивного его перемешивания.
Но и это далеко не все — напомним, что тепловые процессы крайне инерционны. И нагреватель, и датчик, и масса воды, и стенки бака обладают некоей теплоемкостью и, соответственно, тепловой инерцией, которая на много порядков превышает время срабатывания электронных устройств. Процессы нагревания и остывания протекают во времени примерно так же, как процесс заряда-разряда конденсатора через резистор (см. рис. 5.7), соответственно эти процессы также можно охарактеризовать аналогом постоянной времени RC — она так и называется тепловой постоянной времени. В данном случае наибольшая постоянная времени будет у системы «стенки бака — вода». Но нас даже больше интересует тепловая постоянная нагревателя (тепловую инерцию датчика пока учитывать не будем — обычно она много меньше остальных).
Что будет происходить в реальной системе? Когда температура, по мнению датчика, достигла заданной, электронные компоненты послушно выключат питание нагревателя. Но он еще некоторое время будет греть воду, отдавая туда тепло, запасенное за счет его собственной теплоемкости. Чем массивнее нагреватель, тем дольше будет длиться этот процесс. Мало того, это остаточное время также зависит от мощности нагревателя — чем он мощнее, тем также количество лишнего отданного тепла будет больше, потому что выше будет начальная температура внутри нагревателя. Произойдет перерегулирование — нагреватель давно выключен, а температура некоторое время продолжает расти. В точности то же самое, но в обратную сторону, повторится при остывании системы — нагреватель включится, но ему нужно некоторое время, чтобы прогреться, и все это время температура будет продолжать падать.
Отсюда второе условие хорошего регулирования — масса нагревателя и его мощность должны быть минимально возможными, т. е. такими, чтобы при наихудших условиях (при максимальной разнице между установленным значением температуры и окружающей средой) только-только суметь «победить» потери тепла через стенки бака и через поверхность воды. На самом деле это положение в полной мере действительно только в нашей простейшей схеме релейного регулирования (нагреватель или выключен, или включен полностью).
Можно ослабить требования, если регулировку производить другим способом — плавным изменением мощности пропорционально разнице температур. Схема такого пропорционального регулятора значительно сложнее простой релейной, но и требуется такой подход лишь в особо точных профессиональных термостатирующих устройствах. В быту практически всегда можно обойтись релейным регулированием.
Естественно, само по себе регулирование будет происходить только в определенных пределах температуры окружающей среды. Если температура среды выше или равна установленной, то бак никогда не остынет, а нагреватель никогда не включится, и система будет просто иметь температуру окружающей среды. Наоборот, при очень низкой температуре среды у нас может не справиться нагреватель — потери тепла превзойдут его мощность.
Холодильник в этой системе может понадобиться, если нам нужно поддерживать температуру ниже температуры окружающей среды или независимо от нее (в рассмотренном случае роль холодильника играет окружающая среда). Как же его сюда при необходимости пристроить? Это несложно — достаточно разместить охлаждающий агрегат в баке, а включать его, например, в противоположной фазе с нагревателем: когда нагреватель включен, холодильник выключен, и наоборот. Но холодильник всегда имеет очень большую инерционность, и плавное регулирование мощности (холодопроизводительности) для него недоступно. Поэтому чаще поступают иначе: холодильник нередко не выключают вовсе, а мощность нагревателя подбирают так, чтобы он в любом случае «побеждал» холодильник. При этом, увы, подавляющая часть потребляемой энергии уходит на взаимную «борьбу» холодильника и нагревателя, т. е. с точки зрения целевого назначения совершенно впустую. Зато качество регулирования оказывается на высоте.
Если же вообще нагреватель убрать, а холодильный агрегат включать через регулятор по рис. 12.7 (естественно, где-то инвертировав фазу — холодильник должен включаться при превышении заданной температуры, а не при снижении ее), мы получим в точности схему обычного домашнего холодильника — он ведь и предназначен для того, чтобы поддерживать температуру всегда ниже, чем температура окружающей среды, и точно так же перестанет что-либо регулировать, если эта температура выйдет за пределы диапазона регулировки. Если холодильник выставить на мороз, то он никогда не нагреется, а если поставить в горячем цеху (или просто открыть дверцу), то никогда не выключится.
Вооружившись таким пониманием процессов, происходящих в термостатах, приступим к практическому их проектированию.
Простой термостат для аквариума
Простые конструкции термостатов, как мы говорили, используют релейный принцип регулирования — «включено-выключено». Иначе такие регуляторы еще называют позиционными. ОУ здесь удобно включать по схеме компаратора (от англ. compare — сравнивать) — т. е. без собственной обратной связи. Поскольку коэффициент усиления его в таком включении огромен, то он и будет находиться в одном из двух состояний: если сигнал с задающего устройства больше сигнала датчика, на выходе ОУ будем иметь практически положительное напряжение питания, если меньше — отрицательное (или ноль, если питание однополярное).
На рис. 12.8 приведена практическая схема терморегулятора для аквариума.
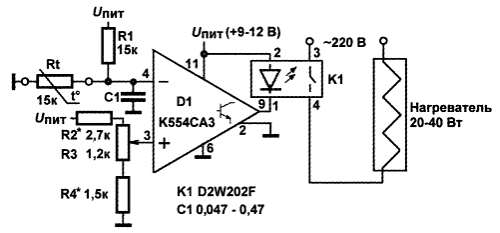
Рис. 12.8. Принципиальная схема терморегулятора для аквариума
Устроена она, как видите, довольно просто. Датчик температуры Rt представляет собой термистор[15], т. е. элемент, сопротивление которого падает с увеличением температуры, и сигнал на инвертирующем входе ОУ также будет падать (конденсатор С1 обеспечивает сглаживание наведенных помех). С этим связан один нюанс — в рассмотренной ранее обобщенной схеме сигнал датчика возрастал, но включен он был также в инвертирующий вход.
Все дело тут в необычном устройстве выходного каскада компаратора 554САЗ (импортный аналог — LM311 в 14-выводном DIP-корпусе). У него в качестве оконечного усилителя используется довольно мощный n-p-n-транзистор (напряжение коллектор-эмиттер до 40 В и ток коллектора до 50 мА), который соединяется с остальной схемой внутри корпуса только базой, а эмиттер и коллектор выведены наружу (эмиттер — вывод 2, коллектор — вывод 9). На самом деле напрямую выведен только коллектор, а эмиттер подключен несколько сложнее, но это для нас не имеет значения. Если мы присоединим эмиттер к «земле», то получим так называемую схему с открытым коллектором, и именно так и делается в большинстве практических применений компаратора. Заметим, что в техническом описании компаратора LM311 фирмы National Semiconductor приведено большое количество типовых схем таких применений.
Чтобы получить на выходе напряжение, при этом следует в коллекторную цепь установить нагрузку — в простейшем случае это резистор, но можно подсоединить и обмотку реле или, скажем, лампочку. У нас нагрузкой служит входной светодиод оптоэлектронного реле — токоограничивающий резистор для него устанавливать не требуется, т. к. у данного типа (D2W202F) он уже имеется внутри реле. При на личии датчика с положительным наклоном (например, обычного медного терморезистора, мы их будем изучать в главе 13) следует поменять местами либо R1 и Rt, либо входы компаратора 3 и 4.
* * *
Заметки на полях
Возникает вопрос — при таком выходном каскаде какой смысл приобретут понятия «инвертирующий» и «неинвертирующий» входы компаратора? Эти наименования были присвоены с учетом того, что одно из основных назначений такого типа компараторов — преобразование аналогового сигнала в логические уровни. При этом выходной транзистор включается обычным способом, с общим эмиттером и нагрузкой в цепи коллектора. Тогда названия входов обретают следующий смысл: при превышении напряжением на инвертирующем входе напряжения на неинвертирующем, на выходе (т. е. на коллекторе выходного транзистора) будет логический ноль (транзистор открыт), и наоборот. Если мы применим это рассуждение к нашему случаю, то увидим, что выходной транзистор откроется, когда температура станет ниже необходимой (т. е. когда сопротивление термистора велико). А нам это и надо — при этом реле включится и подключит нагреватель. При увеличении температуры сопротивление термистора упадет, и когда напряжение на делителе R1-Rt станет меньше, чем на делителе R2-R3-R4, то транзистор закроется и отключит через реле нагреватель.
* * *
В данном случае целесообразно использовать именно термистор, потому что у него высокая (3 4 %/°С) крутизна, отчего и чувствительность, и помехоустойчивость системы возрастают. А характерная для термисторов нелинейность нас не волнует — в диапазоне температур для аквариума изменение крутизны датчика можно вообще не принимать во внимание, а в более широком диапазоне (как далее в схеме термостата для водонагревателя) крутизна уменьшится примерно в полтора раза при увеличении температуры на 60–70°, что просто означает некоторое уменьшение чувствительности.
Здесь можно использовать термистор любого типа (например, классический ММТ-1 или подробно описанный в главе 13 В57164-К) с номинальным (при 20 °C) сопротивлением от нескольких килоом до нескольких десятков килоом. При этом сопротивление резистора R1 должно быть примерно равно номинальному сопротивлению термистора при 20 °C или несколько меньше этого значения (чем оно меньше, тем хуже для термистора, т. к. он может перегреваться питающим током, однако, чем оно больше, тем меньше рабочий диапазон напряжений).
Сам датчик можно изготовить следующим образом (рис. 12.9): термистор с припаянными к нему достаточно длинными выводами помещается в металлическую или пластмассовую трубку и заливается эпоксидной смолой.
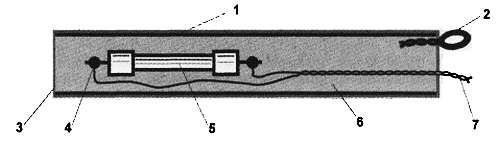
Рис. 12.9. Датчик для терморегулятора по рис. 12.8:
1 — металлическая или пластмассовая трубка; 2 — «ухо» для крепления; 3 — слой водостойкого лака; 4 — место пайки вывода термистора; 5 — термистор; 6 — эпоксидная смола; 7 — выводы
Для того чтобы смола не вытекала, пока не затвердеет, нужно временно залепить нижнюю часть трубки пластилином. Одновременно в трубке с одного конца закрепляется «ухо» для крепления датчика, которое можно изготовить просто из проволочной петельки. Чтобы исключить выщелачивание вредных веществ из эпоксидной смолы во время эксплуатации датчика, нужно дополнительно покрыть датчик водостойким лаком. Подойдут уретановые лаки для лакирования печатных плат, автомобильные эмали горячего отверждения (или, в крайнем случае, обычная олифа, которая имеет очень высокую водостойкость, но, к сожалению, сохнуть может при комнатной температуре неделями). Операции окраски можно избежать, если использовать вместо эпоксидной смолы силиконовый герметик, которым, однако, аккуратно заполнить внутреннюю полость трубки значительно сложнее (трубка при этом должна быть, естественно, либо пластиковая, либо нержавеющая).
Электронное реле типа D2W202F (фирмы CRYDOM) можно заменить на любое другое подобное реле или даже на простое электромеханическое, только в последнем случае нужно учитывать то, что написано далее о дребезге контактов.
Настройка регулятора сводится к тому, чтобы подобрать сопротивления R2 и R4 под конкретный экземпляр термистора. Сначала мы подсоединяем вместо них переменные резисторы, выводим движок потенциометра R3 в верхнее положение по схеме, погружаем датчик в воду с температурой 18 °C (это будет нижний предел диапазона регулировки температуры) и, изменяя величину R2, фиксируем момент срабатывания реле (можно просто подсоединить к его контактам тестер в режиме «прозвонки», но удобнее временно вместо нагрузки подсоединить маломощную лампочку накаливания). Далее погружаем датчик в воду с температурой 32 °C (верхний предел), выводим R3 в нижнее положение и подбираем R4 до срабатывания реле. При этом у нас нижний предел также «уедет», поэтому придется сделать несколько итераций, чтобы добиться нужного результата, и при этом нужно следить за температурой воды — она в обоих случаях не должна меняться от раза к разу. Чтобы не устраивать столь долгую «песню», можно просто измерить напряжение на делителе R1-Rt при нужных температурах и рассчитать величины сопротивлений R4 и R2 заранее, а затем при необходимости их подкорректировать (хотя этого обычно не требуется — какая разница, будет у нас нижний предел 18 или 17 °C? Главное, чтобы мы его знали).
В окончательной конструкции регулировочный резистор R2 снабжается шкалой, по которой мы будем устанавливать поддерживаемую температуру. Следует учесть, что при использовании термистора шкала эта будет неравномерная — к концу промежутки между делениями будут короче, т. к. чувствительность термистора с температурой падает. Поэтому шкалу следует изготовить эмпирическим методом: полностью отлаженный термостат подключается к небольшой емкости с водой (чтобы нагревание и остывание шли не слишком долго), а затем отмечаются углы поворота движка резистора R2, которые соответствуют различным установившимся температурам — именно установившимся, а не температурам в момент срабатывания реле, т. к. они могут отличаться. Эта процедура носит название калибровки.
Кстати, а как же здесь быть с теплоизоляцией и перемешиванием, о необходимости которых «так долго говорили большевики»? Теплоизоляцией, естественно, придется пожертвовать, но при столь, небольших перепадах температур между водой и окружающей средой она и не требуется. А вот насчет перемешивания «большевики» совершенно правы — без него ничего не выйдет. Поэтому терморегулятор в аквариуме можно использовать только в сочетании с аэратором воды, который очень хорошо ее перемешивает, причем рассеиватель аэратора должен быть размещен на самом дне аквариума. При этом датчик подвешивают на половине высоты аквариума, а нагреватель — также вблизи дна.
Нагреватель указанной мощности лучше всего купить в магазинах для аквариумистов, но можно и изготовить его самостоятельно из мощного остеклованного резистора типа ПЭВ сопротивлением около 1 кОм. Мощность резистора может быть не более 5-10 Вт — в воде коэффициент теплоотдачи возрастает во много раз. Только не забудьте, что такой нагреватель, подобно обычному кипятильнику, нельзя включать на воздухе. Выводы следует тщательно изолировать: сначала они покрываются лаком, потом изолируются термоусадочным кембриком, затем поверх него также покрываются в несколько слоев водостойким лаком или силиконовым гермехиком.
После изготовления качество изоляции следует проверить: погрузите нагреватель в теплый раствор соли и измерьте сопротивление между выводами и раствором — на всех пределах измерения сопротивления мультиметр должен показывать полный разрыв цепи.
Подчеркнем еще раз — если температура воздуха в помещении сама достигнет заданной и превысит ее, то терморегулятор наш перестанет включаться, и температура воды окажется равной температуре воздуха (точнее, она всегда будет несколько ниже ее — из-за испарения с поверхности). Описанный термостат предназначен только для подогрева воды и стабилизации ее температуры на некотором уровне, заведомо более высоком, чем температура окружающей среды. И его использование наиболее актуально зимой, когда отопление в наших квартирах работает сами знаете как.
О гистерезисе
Во всем этом деле есть еще один нюанс. Что будет происходить в момент, когда напряжения на входах компаратора сравняются? Чувствительность у компаратора огромная, а как в сигнале датчика, так и на выводе задающего делителя всегда присутствует хоть маленькая, но помеха, и конденсатор С1 ее не устранит полностью — если даже все идеально заэкранировать, роль помехи сыграют собственные шумы компонентов схемы, которые имеются принципиально (если температура, конечно, отличается от абсолютного нуля). Поэтому в момент равенства напряжений на выходе компаратора появится «дребезг» — он будет быстро-быстро переключаться туда-сюда, переключая и реле тоже. В случаях, подобных нашему, при использовании в качестве исполнительного механизма электронного реле с zero-контролем (или, скажем, транзистора), на этот дребезг можно закрыть глаза. Отсутствует дребезг и в схемах с пропорциональным регулированием, пример которого мы увидим далее. Но в других случаях нечеткое срабатывание приводит к разным неприятным последствиям: для обычного тиристорного реле (вроде самодельного из главы 22) это помехи, для электромеханических реле, сверх того, еще и быстрый износ контактов, да и просто далеко не услаждающий слух шум.
Для того чтобы избежать этого явления, в схему вводит так называемый гистерезис (от греческого hysteresis — отставание реакции от вызвавшего ее внешнего воздействия). На рис. 12.10 показана идея того, как это делается с помощью положительной обратной связи, охватывающей компаратор, хотя, как мы увидим далее, делать именно так необязательно.
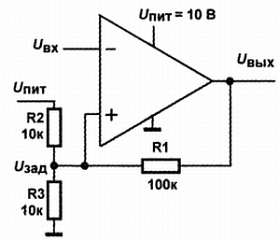
Рис. 12.10. Схема компаратора с гистерезисом
Напряжение питания всей схемы в данном случае однополярное. Пусть напряжение Uвх ниже напряжения на делителе Uзад? тогда на выходе компаратора напряжение равно положительному напряжению питания (все компараторы поддерживают полный диапазон напряжений по выходу — Rail-to-Rail).
В этом случае резистор R1 шунтирует R2, и напряжение Uзад больше того значения, которое оно бы имело в отсутствие резистора R1, — при указанных на схеме номиналах и напряжении питания оно равно 5,24 В. Когда Uвх увеличится и достигнет Uзад, компаратор переключится, и напряжение на выходе станет равным нулю. Резистор R1 теперь шунтирует R3, и напряжение на делителе Uзад станет ниже — оно будет равно 4,76 В. Теперь небольшая помеха не страшна — чтобы переключиться обратно, напряжение на входе должно опуститься аж на целых 0,48 вольта. Состояние компаратора при переключении как бы фиксируется.
Величина разницы в порогах (0,48 В в данном случае) называется зоной нечувствительности. Естественно, наличие этой зоны усугубляет влияние тепловой инерции нагревателя — включение-выключение нагревателя происходит позже, чем надо бы, и перерегулирование растет. Поэтому величину этой зоны при необходимости качественного регулирования нужно выбирать очень аккуратно. Сложность введения гистерезиса таким, если можно так выразиться, «академическим» способом в реальных схемах обусловлена тем обстоятельством, что половинки входного делителя обычно не равны друг другу, к тому же чаще всего (как в нашем случае) делитель этот есть переменное сопротивление, и зона нечувствительности будет зависеть от положения движка потенциометра.
Должен сказать, что обычные электромеханические реле сами по себе имеют гистерезисную характеристику — как мы отмечали в главе 7, напряжение срабатывания у них может в несколько раз превышать напряжение отпускания. Так что простое снижение чувствительности компаратора (превращенного тогда в обычный ОУ с отрицательной обратной связью), казалось бы, могло бы нам в этом случае помочь. И все же оно не поможет, и дребезг будет появляться все равно, потому что выходное напряжение ОУ с наложенной на него помехой тогда станет нарастать очень медленно, и в момент достижения напряжения срабатывания реле начнет срабатывать очень неуверенно — несколько раз пытаясь сработать, но затем откатываясь назад, и издавая при этом характерное такое жужжание. Поэтому будет лучше и для нас, и для реле, если мы введем контролируемый гистерезис по всем правилам. Один из способов, как это можно сделать практически, сейчас мы и продемонстрируем.
Терморегулятор «для дома для семьи»[16]
Обычное устройство для нагревания воды в условиях отсутствия центрального горячего водоснабжения (например, в дачном домике) состоит из бака на 5-20 л со встроенным электронагревателем (ТЭНом) мощностью 1–2 КВт. Использовать его без терморегулятора неудобно — приходится внимательно следить за тем, чтобы вода не закипела, да и получается она либо слишком горячая, либо наоборот — недогретая.
На рис. 12.11 изображена схема термостата на этот случай.
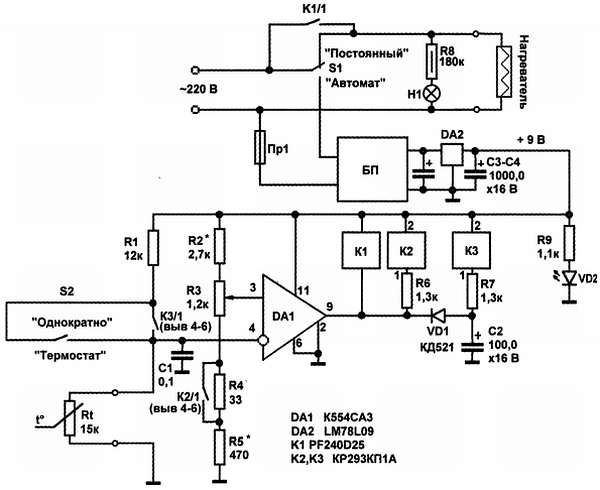
Рис. 12.11. Схема термостата для нагревания воды
Она только на вид кажется сложной, на самом деле отличается от схемы термостата для аквариума практически только тем, что в ней выбрано значительно более мощное электронное реле (до 10 А при естественном, без обдува, охлаждении) и введены дополнительные элементы (два маломощных электронных реле и два тумблера), в основном для обеспечения различных режимов работы. Режимы эти следующие:
□ автоматический термостатирующий;
□ автоматический однократный с отключением по достижении нужной температуры («режим электрочайника»);
□ ручной с подключением ТЭНа напрямую к сети.
Сначала отвлечемся от режимов и посмотрим, как работает основная схема регулирования — в ней есть небольшое отличие от схемы на рис. 12.8, которое заключается в том, что в схему введен резистор R4 небольшого номинала, шунтированный контактами маломощного реле К2.
После включения питания, если температура еще ниже установленной, срабатывает не только основное мощное реле К1, но и реле К2 (встроенных токограничивающих резисторов в реле этого типа нет, и с этой целью установлены резисторы R6 и R7). Контакты его замкнуты, и резистор R4 не участвует в работе схемы. По мере увеличения температуры напряжение на датчике падает, и в какой-то момент времени выходной транзистор компаратора разрывает цепь питания К1 — нагреватель обесточивается. Одновременно отключается реле К2 и резистор R4 включается в цепь делителя R2-R3-R4-R5, еще больше увеличивая разницу напряжений между выводами компаратора. По мере остывания воды напряжение на датчике повышается, и в какой-то момент компаратор снова срабатывает, подключая нагрузку через реле К1. Контакты К2 при этом опять шунтируют резистор R4, и это тоже увеличивает разницу напряжений, но теперь «в другую сторону».
Как видите, мы получили типичную гистерезисную характеристику — хотя мы здесь и используем электронное реле с zero-коррекцией, но коммутирует оно мощную нагрузку, и слишком частые изменения тока в маломощной деревенской сети в момент включения и выключения реле нам совершенно ни к чему. Разумеется, наличие резистора R4 несколько увеличивает нестабильность поддержания температуры — при приведенных на схеме номиналах разница между температурой включения и выключения составит от 1 до 1,5 °C (например, при установленной температуре в 35 °C нагреватель включится, когда температура упадет до 34 °C, а выключится — когда она достигнет 35,5 °C), однако нам более высокая стабильность в данном случае совершенно не требуется.
Теперь разберемся с режимами. Сначала — с режимом электрочайника, для обеспечения которого в схему введено еще одно маломощное реле КЗ, включенное, как видите, довольно хитрым образом. Если тумблер S2 находится в положении «Термостат» (т. е. контакты его замкнуты и шунтируют контакты реле КЗ), то реле КЗ никак не участвует в работе схемы. Если же его переключить в режим «Однократно», то в момент достижения нужной температуры, вместе с отключением основного реле К1, реле КЗ, ранее включенное через диод VD1 и резистор R7 в ту же коллекторную цепь выходного транзистора микросхемы, также отключается, контакты его размыкаются, и вывод 4 компаратора оказывается подключенным через датчик температуры к потенциалу «земли».
Такое состояние схемы устойчиво, и для возобновления работы в режиме стабилизации температуры необходимо либо на некоторое время отключить напряжение питания, либо тумблером S2 переключить схему в режим «Термостат». Конденсатор С2 вместе с диодом VD1 служат для «правильного» запуска схемы при включении питания. Если тумблер S2 разомкнут, то контакты реле КЗ должны замкнуться сразу после подачи напряжения питания, иначе компаратор не сработает даже при низкой температуре, и все реле так и останутся разомкнутыми. При подаче напряжения питания, как мы знаем, конденсатор представляет собой короткозамкнутый участок цепи, поэтому реле КЗ на небольшое время, пока конденсатор заряжается (примерно 100 мс), замкнет контакты. Диод VD1 на это время запирается и предохраняет от срабатывания реле К1 и К2. В случае, если температура воды в момент включения превышает установленную, такое срабатывание реле будет кратковременным — только на время зарядки конденсатора С2. Если же температура ниже требуемой, то компаратор успеет сработать, диод VD1 откроется, и все реле останутся в замкнутом состоянии до момента отключения нагрузки. Кстати, опыт эксплуатации подобного устройства показал, что наиболее популярен именно однократный режим (режим электрочайника), т. к. он позволяет экономить электроэнергию и не беспокоиться о том, что вы оставили включенный электроприбор без присмотра.
Ручной режим (резервный, на случай выхода автоматики из строя, чтобы не остаться вовсе без горячей воды) обеспечивается просто: тумблер S1 в положении «Постоянный» подает сетевое питание напрямую на нагреватель (контакты К1 при этом шунтируются, схема обесточивается, а вся система работает так, будто никакой автоматики и не существует). В положении «Автомат» сетевое напряжение переключается на блок питания автоматики, а нагреватель теперь может включаться только контактами реле. Тумблер S1, естественно, должен выдерживать рабочий ток ТЭНа. Здесь подойдет импортный переключатель В1011, рассчитанный на ток до 16 А при напряжении 250 В, или другой аналогичный. В крайнем случае можно использовать автомобильные переключатели от «Жигулей», которые выдерживают большие токи, но это не очень корректно, т. к. на напряжения до 300 В они не рассчитаны.
Когда сетевое напряжение поступает на нагрузку (неважно, через тумблер или контакты реле), горит включенная параллельно ей неоновая лампочка HI, по которой можно контролировать работу схемы. Лампочка может быть любого типа, только не забудьте, что резистор R8 должен иметь мощность не менее 0,5 Вт, т. к. работает при сетевом напряжении. Использованное симисторное реле PF240D25 (разводка его выводов на схеме не показана, все нарисовано прямо на его корпусе), вообще-то допускает ток до 25 А, однако без принудительного охлаждения достаточно сильно греется уже при 10 А. Поэтому возможную мощность ТЭНа лучше ограничить величиной 2 кВт, а в корпусе устройства сверху и снизу обязательно должны наличествовать вентиляционные отверстия. Неплохо также, если реле К1 в рабочем положении корпуса будет расположено выше остальных деталей.
Если вы хотите добиться большей мощности, то лучше использовать аналогичное реле типа D2425 с возможностью установки на дополнительный радиатор (не ставить же, в самом деле, вентилятор, как рекомендуют производители PF240D25). Использовать при таких нагрузках электромагнитное реле вместо оптоэлектронного довольно затруднительно — придется включать мощный пускатель через промежуточное реле, и он отнюдь не будет услаждать ваш слух своим грохотом и жужжанием. А вот реле К2 и КЗ вполне можно заменить маломощными электромеханическими, например, типа РЭС-60 или РЭС-49. Естественно, резисторы R6 и R7 в этом случае не требуются, а вот у конденсатора С2, возможно, придется раза в два увеличить емкость для более надежного включения устройства.
В положении тумблера S1 «Автомат» сетевое напряжение поступает на простейший блок питания, сделанный по рис. 9.10. Как обычно, его можно извлечь из покупного блока со встроенной вилкой — мощности от него никакой не требуется (вся схема потребляет ток порядка 30 мА), поэтому можно выбирать любой на напряжение 10–15 В. Напряжение с него поступает на стабилизатор типа LM78L09 (в корпусе ТО-92, его можно заменить отечественным 142ЕН8Б), откуда стабилизированное напряжение +9 В подается на питание схемы. Светодиод VD2 сигнализирует о том, что автоматика включена — его лучше выбирать зеленого свечения, чтобы обеспечить контраст с неоновой лампочкой.
При указанных на схеме номиналах термостат обеспечивает установку температуры в диапазоне примерно 35–85 градусов. Настройка его и калибровка ничем не отличаются от таковых для аквариумного термостата, кроме диапазона температур.
В процессе настройки основную нагрузку можно не подсоединять, т. к. момент срабатывания и отключения вполне можно контролировать по неоновой лампочке. Только следует учесть, что вовсе без нагрузки «неонка» может гореть даже при выключенном реле из-за токов утечки, и вам даже может показаться, что система не работает. Тогда придется все же подключить какую-то нагрузку — в качестве нее удобно взять лампочку накаливания или даже просто двухваттный резистор сопротивлением около 20 кОм.
С перемешиванием/теплоизоляцией здесь ситуация обратная по сравнению с аквариумом — принудительное перемешивание тут обеспечить довольно сложно, но оно как раз и не очень требуется: во-первых, требования к точности поддержания температуры невысоки, во-вторых, нагреватель настолько мощный, что вода сама неплохо перемешивается за счет конвекции (естественной циркуляции нагретых водных масс). А вот теплоизолировать бак для воды я настоятельно рекомендую — просто обернув его старым ватным одеялом, вы можете экономить до 70 % электроэнергии, причем это касается не только данной конструкции, но и вообще всех водонагревателей. Можно сделать и «фирменную» теплоизоляцию из упаковочного пенопласта.
В заключение отметим, что схемы для построения термостатов невысокого класса, подобных описанным, существуют, разумеется, и в интегральном исполнении. Обычно они при этом совмещены с полупроводниковым датчиком температуры, который часто имеет и отдельный выход, что обеспечивает возможность показа температуры. С такими устройствами все знакомы, например, по встроенным в компьютерные материнские платы системам контроля температуры процессора и регулирования оборотов вентилятора.
О цифровых методах регулирования температуры мы немного поговорим в конце книги, а пока краткий курс теплотехники будем считать законченным и перейдем к другой теме — измерению этой самой температуры.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК