Стабилизация корабля Apollo
Стабилизация корабля Apollo
Необходимость стабилизации корабля при возникновении изгибных колебаний или плескания жидкости является одним из основных требований, предъявляемых к ЦАП.
Для стабилизации корабля как твердого тела в ЦАП были приняты следующие значения запасов устойчивости:
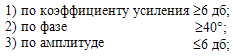
Указанные значения критериев устойчивости выбраны в предположении, что коэффициент усиления автопилота автоматически изменяется и компенсирует изменение характеристик цепи ЖРД-аппарат при выгорании топлива.
Для стабилизации корабля при возникновении изгибных колебаний или плескания жидкости в передаточной функции вводятся сомножители, расположенные вблизи от мнимой оси и соответствующих нулей.
Коэффициент усиления разомкнутой системы пропорционален произведению коэффициента усиления фильтра ЦАП Kz и квазистатического коэффициента цепи ЖРД-аппарат Kg, где

– передаточная функция ЖРД-аппарат.(22.26)
Kg зависит от количества топлива и изменяется по мере его выгорания. Эти изменения компенсируются обратнопропорциональным изменением коэффициента Kz, так чтобы общий коэффициент усиления контура оставался неизменным.
Таким образом устойчивость корабля как твердого тела при возникновении изгибных колебаний и плескании жидкости обеспечивается выбором компенсирующего фильтра.
На режиме широкого диапазона работы фильтр обеспечивает стабилизацию корабля от изгибных колебаний путем создания фазового запаздывания на низких частотах и затухания на высоких частотах.
Стабилизация корабля от плескания жидкости осуществляется за счет создания фильтром фазового опережения.
Компенсирующий фильтр обеспечивает стабилизацию корабля за счет фазового запаздывания при изгибных колебаниях с частотами ниже 8,4 рад/сек. При этом запас устойчивости на резонансной частоте составляет 35°.
На режиме широкого диапазона работы обеспечивается стабилизация корабля при возникновении любых плесканий жидкости в баках корабля. Этот случай соответствует номинальным условиям – полному заполнению баков корабля.
Максимальная частота плескания жидкости, при которой обеспечивается стабилизация корабля, составляет 4,075 рад/сек, что на 20% превышает максимум частоты для номинальных условий, равный 3,4 рад/сек.
На режиме узкого диапазона работы фильтр обеспечивает стабилизацию корабля от высокочастотных плесканий жидкости при неполных баках созданием затухания до 57 дб. Стабилизация корабля от частоты плескания жидкости, которая ниже 2,08 рад/сек, осуществляется за счет фазового запаздывания. Затухание изгибных колебаний осуществляется более чем на 100 дб.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
1.2. Последовательность операций при старте Saturn V и выводе корабля Apollo на траекторию полета к Луне
1.2. Последовательность операций при старте Saturn V и выводе корабля Apollo на траекторию полета к Луне Сборка и проверка в сборочном цехе Предполетная проверка и испытания Saturn V Apollo ocyществляются объединенной правительственно-промышленной комиссией в составе 500 человек. Более
Система жизнеобеспечения экипажа корабля Apollo
Система жизнеобеспечения экипажа корабля Apollo Система жизнеобеспечения экипажа космического корабля Apollo разработана и изготовлена фирмой Airsearch (США). Система обеспечивает поддержание в кабине корабля температуры в пределах 21…27°С, влажности от 40 до 70% и давления 0,35
Усовершенствование корабля Apollo
Усовершенствование корабля Apollo После аварии с космическим кораблем Apollo-13 NASA провел усовершенствование служебного отсека, заключавшееся в следующем.1. Установлен дополнительный кислородный бак в секции № 1 служебного отсека. Это позволит астронавтам в случае аварии,
1.5. Двигательные установки корабля Apollo
1.5. Двигательные установки корабля Apollo Корабль Apollo имеет 3 главные двигательные установки: служебного отсека, посадочную и взлетную. Служебная двигательная установка используется для коррекции траектории полета к Луне, выхода на траекторию ИСЛ, выхода на траекторию
1.6. Космические летные испытания двигательных установок корабля Apollo
1.6. Космические летные испытания двигательных установок корабля Apollo После обширной программы наземных испытаний в Уайт-Сэндз, шт. Нью-Мексико, включавшей проверку работы двигательных установок на всех ожидаемых режимах работы, в барокамере на экспериментальном образце
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1). Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 –
2.2. Цифровой автопилот космического корабля Apollo
2.2. Цифровой автопилот космического корабля Apollo Впервые в условиях пилотируемого космического полета цифровой автопилот (ЦАП) был применен на космическом корабле Apollo.Анализ результатов полетов кораблей Apollo с ЦАП показывает хорошее совпадение прогнозируемых и
Характеристики космического корабля Apollo
Характеристики космического корабля Apollo Динамические характеристики корабля Apollo существенно отличаются от характеристик основного блока, поэтому потребовалась разработка двух самостоятельных программ для ЦАП, управляющего обоими аппаратами. Основные различия
3.2. Управление траекторией полета корабля Apollo
3.2. Управление траекторией полета корабля Apollo Бортовая ЭЦВМ – главный элемент системы управления Apollo. Успех управления полетом корабля целиком зависит от эффективности работы бортовой ЭЦВМ. На любом этапе полета требуется, чтобы бортовая ЭЦВМ выполняла почти
Главные составные части системы навигации и управления полетом корабля Apollo
Главные составные части системы навигации и управления полетом корабля Apollo Главные составные части и приборы системы управления и навигации корабля Apollo: блок инерциальных измерений; астронавигационный блок оптических измерений; бортовая ЭЦВМ; пульт управления с
Стабилизация корабля
Стабилизация корабля Сохранение заданной ориентации – стабилизация корабля – осуществляется ЦАП с помощью управления соленоидными топливными клапанами ЖРД РСУ непосредственно по информации об ошибках ориентации и угловой скорости ориентации. Сигналы ошибок
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну:
Перестроение корабля Apollo-11
Перестроение корабля Apollo-11 Через 25 мин после выхода на траекторию полета к Луне экипаж приступил к маневру перестроения, осуществив его с той же последовательностью операций, как и в полете Apollo-10В момент времени To +04 ч 09 мин корабль Apollo-ll был отброшен четырьмя пружинами от