Характеристики летательного аппарата
Характеристики летательного аппарата
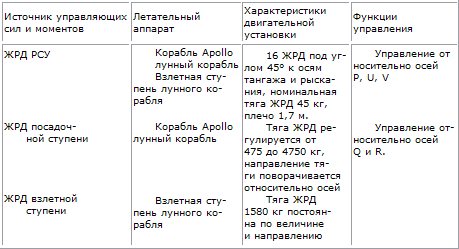
Лунный корабль имеет три основных источника управляющих сил и моментов: ЖРД посадочной и взлетной ступени и ЖРД реактивной системы управления. В табл. 18 приведены характеристики управляющих сил и моментов.
ЖРД РСУ обеспечивают ручное и автоматическое управление ориентацией и малые поступательные перемещения для всех конфигураций летательного аппарата на пассивных участках траектории полета.
На активных участках траектории полета с помощью ЖРД РСУ осуществляются управление ориентацией и стабилизация, причем включаются те ЖРД РСУ, которые создают приращение скорости в желаемом направлении.
Так как ЖРД взлетной ступени имеет вектор тяги, постоянный по направлению, закон управления ЖРД РСУ приспособлен к парированию больших и переменных по времени возмущающих моментов на активном участке траектории полета взлетной ступени.
Таблица 18
Во время работы ЖРД посадочной ступени управление ориентацией относительно оси рыскания Р осуществляется ЖРД РСУ, а относительно осей тангажа Q и крена R путем сочетания ЖРД РСУ и отклонения на кардане ЖРД посадочной ступени.
Расположение и ориентация ЖРД РСУ такова, что если центр тяжести летательного аппарата лежит вблизи геометрического центра 16 ЖРД РСУ (что соответствует взлетной ступени), тогда 8 «Р ЖРД», создающие тягу в направлении У или Z, дают момент, только относительно оси Р, 4 «U ЖРД», действующие в направлении ±Х, создают момент только относительно оси U и 4«V ЖРД», действующие в направлении ±Х, создают момент только относительно оси V (рис. 24.1).
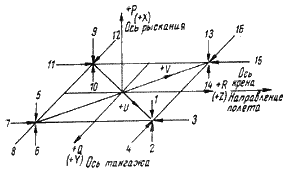
Рис. 24.1. Расположение относительно осей координат ЖРД реактивной системы управления лунного корабля:
ЖРД 2, 4, 5, 8, 10, 11, 13, 15 топливная система А;
ЖРД 1, 3, 6, 7, 9, 12, 14, 16 топливная система В;
Р, Q, R – связанная система координат;
X, Y, Z – ннерциальная система координат
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
4.7.2. Характеристики телевизоров
4.7.2. Характеристики телевизоров ЯркостьЯркость измеряется в физических единицах, называемых «канделы», на единицу площади экрана в квадратных метрах и определяет способность экрана отображать картинку без потерь качества в условиях высокой внешней засветки. Однако
1.4.2. Характеристики
1.4.2. Характеристики Характеристики RFID системы определяются типом выбранных меток. Метки делятся по следующим признакам:– наличие встроенного элемента питания (активные и пассивные)– наличие чипа (чиповые и бесчиповые);– тип хранения данных (метки с уникальной
20. Характеристики потока жидкости
20. Характеристики потока жидкости В гидравлике потоком считают такое движение массы, когда эта масса ограничена:1) твердыми поверхностями;2) поверхностями, которые разделяют разные жидкости;3) свободными поверхностями.В зависимости от того, какого рода поверхностями
5. Основные характеристики измерений
5. Основные характеристики измерений Выделяют следующие основные характеристики измерений:1) метод, которым проводятся измерения;2) принцип измерений;3) погрешность измерений;4) точность измерений;5) правильность измерений;6) достоверность измерений.Метод измерений –
9. Средства измерений и их характеристики
9. Средства измерений и их характеристики В научной литературе средства технических измерений делят на три большие группы. Это: меры, калибры и универсальные средства измерения, к которым относятся измерительные приборы, контрольно—измерительные приборы (КИП), и
3. Основные характеристики измерений
3. Основные характеристики измерений Выделяют следующие основные характеристики измерений:1) метод, которым проводятся измерения;2) принцип измерений;3) погрешность измерений;4) точность измерений;5) правильность измерений;6) достоверность измерений.Метод измерений – это
8. Средства измерений и их характеристики
8. Средства измерений и их характеристики В научной литературе средства технических измерений делят на три большие группы. Это: меры, калибры и универсальные средства измерения, к которым относятся измерительные приборы, контрольно-измерительные приборы (КИП), и
3.1.1. Общие технические характеристики
3.1.1. Общие технические характеристики • тип газоанализатора – стационарный;• световая сигнализация;• диапазон измерения зависит от контролируемого газа;• защита IP-20;• питание от осветительной сети 220 В 50 Гц;• габаритные размеры, не более 485x435x280 мм.Контролируемые
3.4.1. Технические характеристики
3.4.1. Технические характеристики • Диапазон измерения: 0-50 % НКПР;• диапазон показаний: 0-50 % НКПР;• стандартная установка порогов по метану:– 1-й порог 7 % НКПР;– 2-й порог 12 % НКПР;• время работы без подзарядки не менее 10 часов;• температура окружающей среды (от -20 до +50)
Устройство и характеристики
Устройство и характеристики Принципы работы В основе работы неавтономных подогревателей лежат два хорошо известных физических явления: подогрев с помощью электрической энергии и теплообмен в жидкой среде, называемый конвекцией. Хотя оба явления известны, но
2.1. Основные технические характеристики
2.1. Основные технические характеристики Технические характеристики приведены для импульсного преобразователя с максимальной мощностью 200 Вт (суммарная вторичная мощность по всем каналам). Параметры, представленные в данном разделе, являются стандартными для блоков ATX
3.1. Основные технические характеристики
3.1. Основные технические характеристики Источник питания подобного типа построен по схеме импульсного преобразователя напряжения с бестрансформаторным подключением к питающей сети. Он выполняет преобразование переменного сетевого напряжения в постоянные с
Характеристики: метрологические и не очень
Характеристики: метрологические и не очень У метрологического оборудования и приборов есть общетехнические и метрологические характеристики. Общетехнические — вес, объем, надежность, потребляемая мощность, ремонтопригодность, патентная чистота, приятность для взора,