2.3. Ручное управление кораблем Apollo
2.3. Ручное управление кораблем Apollo
На всех этапах полета корабля Apollo, а также в критических и аварийных ситуациях управление кораблем может осуществляться астронавтами вручную. Система ручного управления обеспечивает стабилизацию полета по курсу, координированные развороты, команды на ориентацию и перемещение корабля в пространстве.
Отличительная особенность ручного управления лунного корабля в сравнении с другими летательными аппаратами состоит в том, что его динамические характеристики изменяются в широких пределах.
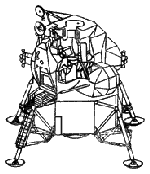
Рис. 23.1. Лунный корабль (посадочная конфигурация).
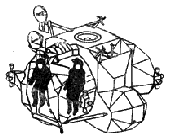
Рис. 23.2. Взлетная ступень.
Лунный корабль управляется вручную во всех трех конфигурациях (рис. 23.1, 2, 3). В посадочной конфигурации один лунный корабль с полным запасом топлива весит 15 т и имеет моменты инерции относительно осей крена, тангажа и рыскания 34 000; 33 900 и 31 200 кг·м? соответственно, когда израсходована половина запаса топлива. Моменты инерции уменьшаются до 20 300; 16 800; 16 200 кг·м? при полностью израсходованном топливе посадочной ступени. Взлетная ступень лунного корабля весит 4900 кг с полным запасом топлива и 2600 кг, когда топливо израсходовано. Начальные моменты инерции 8250; 4700 и 9100 кг·м? уменьшаются после израсходования топлива до 2800; 3900 и 4400 кг·м?.
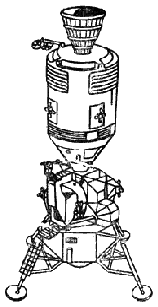
Рис. 23.3. Корабль Apollo.
Лунный корабль, состыкованный с основным блоком с полным запасом топлива при весе 42 800 кг имеет момент инерции относительно оси рыскания 56 000 кг·м?, моменты инерции относительно осей крена и тангажа 676 000 и 671 000 кг·м?, соответственно.
В нормальных условиях полета Apollo моменты инерции могут изменяться в отношении 12 : 1, в аварийных ситуациях это отношение может возрасти до 243 : 1.
Ручное управление лунным кораблем астронавты осуществляют с помощью: рукояток ориентации и перемещения, бортовой ЭЦВМ, ЦАП, пульта управления и шарового индикатора полета.
Ручное управление ориентацией использует только ЖРД РСУ. Каждый ЖРД РСУ оси рыскания создает момент 695 н·м?, а каждый ЖРД крена и тангажа создают моменты по 746 н·м?.
Общее количество топлива на ЖРД РСУ составляет 267 кг, расход топлива на один ЖРД 0,16 кг/сек. ЖРД РСУ неэффективно работают при включении на очень короткие промежутки времени, топливо не полностью расходуется и может скапливаться в магистралях и камерах сгорания. Поэтому минимальный импульс был установлен 14·10? сек. Этот импульс определяет конечную угловую скорость, которая изменяется в зависимости от конфигурации аппарата.
Шаровой индикатор полета – это сфера с тремя степенями свободы, указывающая ориентацию и направление полета корабля; угловые скорости и ошибки ориентации указываются стрелками на фронтальной поверхности прибора вокруг сферы.
Трехосевая рукоятка управления ориентацией на выходе имеет 800 гц и напряжение, пропорциональное отклонению. От центрального положения до отклонения рукоятки на 2° – мертвый ход, отклонение на 10° до мягкого упора соответствует « полному ходу» рукоятки и напряжение на выходе равно 42 делениям. При отклонении рукоятки за мягкий упор, напряжение на выходе и число делений шкалы напряжения продолжают рости до жесткого стопора на 13° (рис. 23.4).
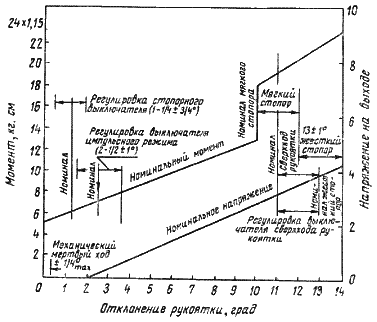
Рис. 23.4. Характеристика ручного управления
Управление ориентацией, перемещением с использованием ЖРД РСУ осуществляется с помощью бортовой ЭЦВМ лунного корабля по программам ЦАП. Ручное управление ориентацией использует эти же коды ЦАП, которые занимают 11% памяти бортовой ЭЦВМ.
Экипаж селектором может устанавливать любой из трех режимов работы ЦАП: «автоматическое управление», «ручное управление», «выключено».
В последнем режиме ЦАП выполняет только программу прерывания.
Режим «автоматического управления» устанавливается, когда осуществляется посадка с работающим ЖРД посадочной ступени, требующая автоматического выполнения маневров. Однако на этом режиме экипаж с помощью рукоятки может корректировать полет корабля по оси Х, пересиливая ЦАП. Во время выполнения ЦАП программы Р-64, отклоняя рукояткой управления корабль по тангажу и крену, дискретно изменяют угол наклона траектории и направление полета, ведя корабль к выбранному месту посадки. При этом ЦАП поддерживает оптимальный режим полета.
Если селектор ЦАП установлен на режим «ручное управление», астронавты с помощью рукоятки могут управлять кораблем относительно всех трех осей.
Экипаж, набирая необходимый код на пульте управления бортовой ЭЦВМ, может по желанию менять характеристики ЦАП, чувствительность рукоятки управления (нормальное или точное управление), ширину зоны нечувствительности при управлении ориентацией (узкая или широкая).
Нормальной чувствительности рукоятки соответствует максимальная командная угловая скорость 20 град/сек при отклонении рукоятки на 1/2 деления шкалы; при точном управлении такому же отклонению рукоятки соответствует командная угловая скорость 4 град/сек. Цена деления шкалы рукоятки управления 0,476 и 0,095 град/сек/деление. [5, 6, 17, 22.]
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
7.7. Управление проектами и всеобщее управление качеством
7.7. Управление проектами и всеобщее управление качеством Эффективное реформирование экономики России невозможно без применения адекватной методологии управления. В настоящее время сформировался новый организационно-экономический подход к реализации политики
Стабилизация корабля Apollo
Стабилизация корабля Apollo Необходимость стабилизации корабля при возникновении изгибных колебаний или плескания жидкости является одним из основных требований, предъявляемых к ЦАП.Для стабилизации корабля как твердого тела в ЦАП были приняты следующие значения
3.2. Управление траекторией полета корабля Apollo
3.2. Управление траекторией полета корабля Apollo Бортовая ЭЦВМ – главный элемент системы управления Apollo. Успех управления полетом корабля целиком зависит от эффективности работы бортовой ЭЦВМ. На любом этапе полета требуется, чтобы бортовая ЭЦВМ выполняла почти
Управление полетом Apollo цифровым автопилотом
Управление полетом Apollo цифровым автопилотом На пассивных участках траектории полета при отсутствии больших действующих на корабль сил задачей ЦАП является управление ориентацией с помощью
Управление кораблем Apollo на активном участке траектории полета
Управление кораблем Apollo на активном участке траектории полета ЦАП на активных участках траектории полета вырабатывает команды на управление вектором тяги ат и осуществляет управление ориентацией корабля и вектора тяги в соответствии с вырабатываемыми командами.Так
Apollo-7
Apollo-7 11 октября 1968 г. в 15 ч 02 мин 45 сек по Гринвичу был произведен запуск на орбиту ИСЗ ракетой-носителем Saturn IB основного блока корабля Apollo весом 18 777 кг с экипажем в составе Уолтер Ширра, Дойн Эйзел и Уолтер Каннингхем. Это был первый полет пилотируемого корабля Apollo. При
Перестроение корабля Apollo-11
Перестроение корабля Apollo-11 Через 25 мин после выхода на траекторию полета к Луне экипаж приступил к маневру перестроения, осуществив его с той же последовательностью операций, как и в полете Apollo-10В момент времени To +04 ч 09 мин корабль Apollo-ll был отброшен четырьмя пружинами от