Автоматическое изменение ориентации корабля
Автоматическое изменение ориентации корабля
ЦАП, управляя маневром ориентации корабля Apollo, использует ту же самую логику, которая применяется на режиме стабилизации, но с дополнением команд по угловой скорости (рис. 32.4). Выработка маневра ориентации выполняется в 2 этапа. Вначале на базе текущей ориентации и требуемой, определяемой экипажем или бортовой ЭЦВМ, находится ось, относительно которой одним вращением будет достигнута требуемая ориентация. Одновременно определяется, не приведет ли рассматриваемый маневр к замыканию рамок кардана блока инерциальных измерений. Если замыкание может произойти, то оси вращения выбираются так, чтобы обойти зону замыкания. Обычно в конце необходимо сделать крен для окончания маневра. В обоих случаях результатом расчета является направление, относительно которого вращается корабль, и угол поворота.
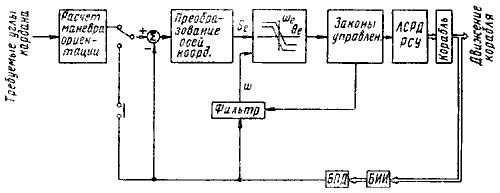
Рис. 32.4. Блок-схема цифрового автопилота, пассивный полет, управление стабилизацией корабля.
Во втором этапе расчета вырабатывается переходная матрица, равная произведению матрицы, соответствующей начальному стабилизированному положению, и трансформирующей матрицы. Это преобразование производится один раз в расчетном цикле.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Автоматическое повторное включение (АПВ)
Автоматическое повторное включение (АПВ) Вопрос. С какой целью и для каких электросетей и электрооборудования предусматривается АПВ?Ответ. Предусматривается для быстрого восстановления питания потребителей, межсистемных и внутренних связей, а также для улучшения
Автоматическое включение резервного питания и оборудования (АВР)
Автоматическое включение резервного питания и оборудования (АВР) Вопрос. Для каких целей предусматриваются устройства АВР?Ответ. Предусматриваются для восстановления питания потребителей путем автоматического присоединения резервного источника питания при
Автоматическое предотвращение нарушения устойчивости (АПНУ)
Автоматическое предотвращение нарушения устойчивости (АПНУ) Вопрос. Для каких целей предназначен комплекс устройств АПНУ?Ответ. Предназначен для предотвращения нарушения динамической устойчивости при аварийных возмущениях и обеспечения в послеаварийных условиях
Автоматическое ограничение снижения частоты (АОСЧ)
Автоматическое ограничение снижения частоты (АОСЧ) Вопрос. Для каких целей предназначен комплекс устройств АОСЧ?Ответ. Предназначен для предотвращения работы потребителей и оборудования охватываемого района при недопустимом снижении частоты. Характеристики АОСЧ
Автоматическое ограничение повышения частоты (АОПЧ)
Автоматическое ограничение повышения частоты (АОПЧ) Вопрос. Для каких целей предназначены устройства АОПЧ?Ответ. Предназначены для предотвращения недопустимого повышения частоты (до 55 Гц), при котором возможно срабатывание автоматов безопасности турбин ТЭС или АЭС, а
Автоматическое ограничение снижения напряжения (АОСН)
Автоматическое ограничение снижения напряжения (АОСН) Вопрос. Для каких целей предназначены устройства АОСН?Ответ. Предназначены для предотвращения снижения напряжения в узлах энергосистемы в послеаварийных режимах до значения, опасного по условиям устойчивости
Автоматическое ограничение повышения напряжения (АОПН)
Автоматическое ограничение повышения напряжения (АОПН) Вопрос. Для каких целей предназначены устройства АОПН?Ответ. Предназначены для ограничения длительности повышения напряжения на электрооборудовании энергосистемы, вызванного односторонним отключением линий
Часть III Автоматическое оружие под специальные патроны
Часть III Автоматическое оружие под специальные патроны ГЛАВА 1 5,66-мм автомат АПС Появление после второй мировой войны в военно-морских силах наших вероятных противников (США. Великобритании. Италии, Турции и т. п.) специальных разведывательно-диверсионных подразделений,
38. Изменение энтропии в процессах
38. Изменение энтропии в процессах Энтропией называется параметр состояния, который зависит от приведенной теплоты (отношение q /T). Изменение энтропии вычисляется по формуле: где q1,2 количество теплоты, подведенной к рабочему телу или отведенной от него;Tср – средняя
6.6.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ЭЛЕКТРОПРИВОДЕ
6.6.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ЭЛЕКТРОПРИВОДЕ Идеи автоматического управления, зародившиеся задолго до создания работоспособного электропривода (идеи Уатта — Ползунова и др.), в 30-е годы начали интенсивно развиваться применительно к электроприводу. Первые
Алгоритм расчета ориентации
Алгоритм расчета ориентации Структура алгоритма расчета ориентации была выбрана на основе калмановской теории фильтрации. Принцип работы алгоритма состоит в сравнении экстраполированных и измеренных значений угла.Для расчета ориентации аппарата необходимыми ЦАП