Навигация и управление траекторией полета
Навигация и управление траекторией полета
Для определения положения и скорости корабля используются компоненты ускорения, создаваемые тягой ЖРД, измеряемые инерциальной системой вдоль трех не вращающихся осей координат.
Бортовая ЭЦВМ производит интегрирование ускорений от тяги с учетом гравитационного ускорения в реальном масштабе времени и в функции инерциального положения определяются компоненты скорости корабля. Учет гравитационных сил может быть выполнен простым методом – опережающим вычислением гравитационных ускорений. На рис. 32.1 приведены уравнения движения аппарата в сферическом гравитационном полете и дается простой расчетный алгоритм в виде дифференциальных уравнений первого порядка, с помощью которого определяются положение и скорость.
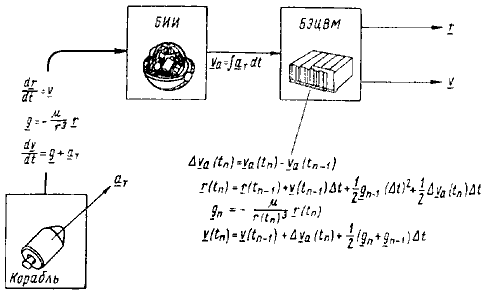
Рис. 32.1. Алгоритм расчета векторов положения г и скорости V.
Так как скорость корректируется путем использования среднего эффективного гравитационного ускорения на каждом шаге интегрирования по времени, этот метод называется «методом среднего g».
Большинство орбитальных маневров может быть выполнено на основе концепции об импульсном изменении скорости. В этом случае импульсное приращение скорости определяется представлением орбиты в виде конических сечений, и кораблем следует управлять таким образом, чтобы необходимое импульсное приращение скорости сводилось к нулю.
На рис. 32.2 вектор Vr обозначает требуемую мгновенную скорость, которую должен иметь аппарат на расстоянии г, чтобы выполнить задачу полета. Разность между требуемым вектором Vr и действительным значением мгновенной скорости V есть необходимое приращение скорости Vg. Можно воспользоваться двумя законами управления, которые одновременно приводят к нулю 3 компоненты скорости Vg.
1. Можно ориентировать корабль так, чтобы ускорение от вектора тяги aт совпало с направлением Vg.
2. Так как ускорение Vg можно представить простым выражением, то ускорение от тяги aт можно ориентировать так, чтобы вектор ускорения V g стал параллелен вектору скорости Vg и направлен в противоположную сторону.
Если бы aт было недостаточно большое, было бы невозможно совместить по линии векторы Vg и Vg, однако, для кораблей с ЖРД, работающих короткий промежуток времени, такая логика управления не встречает затруднений.
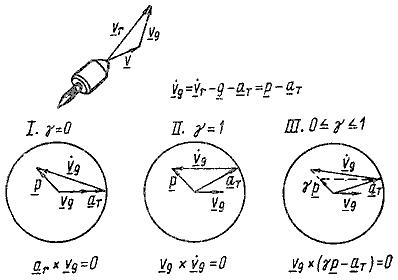
Рис. 32.2. Метод получения необходимого приращения скорости.
Используя оба эти закона можно осуществить весьма эффективное управление, близкое к оптимальному, получаемому методом вариационного исчисления.
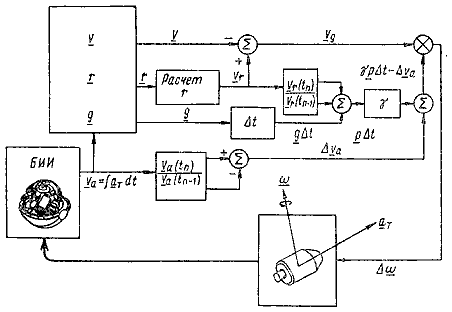
Рис. 32.3. Схема расчета сигнала коррекции ошибки управления
Эмпирически определяется параметр ?, минимизирующий расход топлива на маневр. Для конкретной фазы полета обычно достаточно иметь постоянное значение ?, однако, если это необходимо, ? можно представить, как функцию удобной системы переменных. Схема, иллюстрирующая расчет требуемого сигнала коррекции ошибки управления приведена на рис. 32.3. Векторы положения, скорости и гравитационного ускорения подсчитываются, как указывалось раньше. Требуемая для выполнения конкретной задачи полета импульсная скорость определяется по вектору положения и используется для расчета Vg. Точно произведенный расчет на выходе системы выдает вектор командной угловой скорости, величина которогй пропорциональна малой угловой разности между действительным и командным векторами ускорения от тяги и направление его указывает требуемое направление поворота аппарата, чтобы свести к нулю ошибку. Перед концом маневра, когда Vg мало, аппарат сохраняет постоянную ориентацию, а выключение ЖРД осуществляется по измеряемой величине вектора Vg.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
6. Навигация и другие аспекты человекоориентированных интерфейсов
6. Навигация и другие аспекты человекоориентированных интерфейсов Средний человек испытывает большие страдания от муки новой идеи. Адмирал Уильям С. Симс Одним из самых хвалебных терминов, используемых в отношении интерфейсов, является слово «интуитивный». При
9.7. Арифметика с птичьего полета
9.7. Арифметика с птичьего полета Ситуации и представления в нервной системе человека моделируют смену состояний окружающей среды. Языковые объекты моделируют смену ситуаций и представлений. В результате теория является «двухэтажной» языковой моделью действительности
1.5.4. Навигация главного меню
1.5.4. Навигация главного меню Навигация главного меню представлена в табл. 1.2.Таблица 1.2Навигация главного
8.2.4.3.7 Навигация
8.2.4.3.7 Навигация Должны быть установлены правила навигации по электронной документации.Примечания1 Уровни связей информации в документации должны контролироваться, обеспечивая пользователю возможности возврата в исходный пункт, содержание или указатель без блуждания
7.7. Управление проектами и всеобщее управление качеством
7.7. Управление проектами и всеобщее управление качеством Эффективное реформирование экономики России невозможно без применения адекватной методологии управления. В настоящее время сформировался новый организационно-экономический подход к реализации политики
1.2. Последовательность операций при старте Saturn V и выводе корабля Apollo на траекторию полета к Луне
1.2. Последовательность операций при старте Saturn V и выводе корабля Apollo на траекторию полета к Луне Сборка и проверка в сборочном цехе Предполетная проверка и испытания Saturn V Apollo ocyществляются объединенной правительственно-промышленной комиссией в составе 500 человек. Более
Уменьшение потерь во время полета первой ступени
Уменьшение потерь во время полета первой ступени Расчет на вычислительной машине показывает, что применение программного изменения соотношения компонентов топлива на активном участке полета второй ступени приводит к значительному уменьшению гравитационных потерь на
3.2. Управление траекторией полета корабля Apollo
3.2. Управление траекторией полета корабля Apollo Бортовая ЭЦВМ – главный элемент системы управления Apollo. Успех управления полетом корабля целиком зависит от эффективности работы бортовой ЭЦВМ. На любом этапе полета требуется, чтобы бортовая ЭЦВМ выполняла почти
Управление кораблем Apollo на активном участке траектории полета
Управление кораблем Apollo на активном участке траектории полета ЦАП на активных участках траектории полета вырабатывает команды на управление вектором тяги ат и осуществляет управление ориентацией корабля и вектора тяги в соответствии с вырабатываемыми командами.Так
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну:
Выход на траекторию полета к Луне
Выход на траекторию полета к Луне Через полтора оборота по орбите ожидания в момент времени To +02 ч 44 мин 22 сек над Тихим океаном, чуть южнее экватора, был вторично включен ЖРД J-2 ступени S-IVB; он проработал 348 сек и увеличил скорость аппарата до 10 839,2 м/сек с запасом скорости в
Пассивная траектория полета к Луне
Пассивная траектория полета к Луне Вместо четырех запланированных коррекций траектории полета к Луне была сделана лишь одна, в момент времени To +26 ч 45 мин, когда корабль Apollo-11 находился на расстоянии 202 136 км от Земли; корабль двигался со скоростью 1535 м/сек и вес его был